DLC—32连续式捣固车卫星小车后退走行的优化
2016-03-30 12:38刘亚南
科技视界 2016年2期
刘亚南
【摘 要】在全国各铁路局和铁路施工单位日常施工作业中,DCL-32连续式捣固车在后退走行时,卫星小车速度不能随主机速度变化,缩短走行液压马达使用寿命,并给操作人员带来极大的不便。本文针对这一问题,研究利用原有闲置硬件和原有程控信号对卫星小车走行进行优化的方法。为使主机后退走行时卫星小车可以平稳随动,提供了成本低廉且可行性高的解决方案。
【关键词】DCL-32捣固车;卫星小车;后退走行
【Abstract】In the National Railway Bureau and the railway construction units daily construction and maintenance, when the DCL-32 tamping machine moving backward, the satellite speed can not change with the host machine.This shortens the service life of the hydraulic motor, and brings great inconvenience to the operators. To solve this problem, this paper studies the method of using the original idle hardware and the original program signal to optimize moving of the satellite. In order to make the satellite moving follow the host machine smoothly, when moving backward. To provide a low cost and high feasibility solution.
【Key words】DCL-32 tamping machine; Satellite; Moving backward
0 引言
随着科学技术和社会经济的迅猛发展与深入,对我国铁路高速、重载、繁忙运输提出了越来越高的要求。为了提高铁路线路质量,在我国铁路历次大提速工程中,铁路大型养路机械这一技术含量高、价值昂贵、结构复杂的现代化装备都发挥了不可替代的作用。DCL-32连续式捣固车在全国各铁路局和铁路施工单位已广泛装备300余台,在日常施工作业中,其走行系统存在一定缺陷,为使DCL-32连续式捣固车走行系统得到进一步完善,同时顺应机械设备按设备状态进行预防性维修的趋势[1],有必要对其进行分析和优化。
1 DCL-32连续式捣固车简介
全称DCL-32连续式自动抄平起拨道捣固车,是应用最为广泛的大型养路机械之一。是我国与奥地利普拉塞陶依尔公司合作,引进制造技术进行国产化的大型养路机械,具有较高的作业精度和作业效率,是世界先进的线路捣固机械。该捣固车主要由转向架、车架、牵引装置、前后司机室、捣固装置、起拨道装置、卫星小车组成,集成了测量系统、液压系统、电气系统、气动系统、动力传动系统、制动系统等。采用了电液伺服控制、自动检测、计算机控制和激光准直等先进技术。DCL-32连续式捣固车为双枕连续作业式捣固车,为主机与卫星小车分离的结构,主机连续匀速向前运行,卫星小车以钢轨为导向步进式作业。在封锁线路条件下,能够不间断地进行轨道拨道、起道抄平、轨下道碴捣固和枕端道碴夯实作业[2]。
2 DCL-32连续式捣固车走行系统存在的问题及优化方案
2.1 走行系统存在的问题
在铁路工养护施工作业中,经常需要捣固车向后走行。DCL-32连续式捣固车走行系统的电气控制方式决定了该车向后走行时卫星小车速度相对固定,不能随主机走行速度自动调节。当主机速度过慢或者是后退走行处于下坡状态时,卫星小车速度比主机快,容易造成卫星小车推着主机走行;当主机速度过快或者后退走行处于上坡状态时,卫星小车速度比主机慢,容易造成主机拖着卫星小车走行。DCL-32连续式捣固车长期处于以上两种工况时,非常容易对卫星小车液压驱动马达造成损伤,影响马达使用寿命。本文针对这一问题,通过对后退走行的电气控制方式进行改进,优化卫星小车后退走行工况,延长设备使用寿命,增强操作舒适性。
2.2 后退走行控制原理
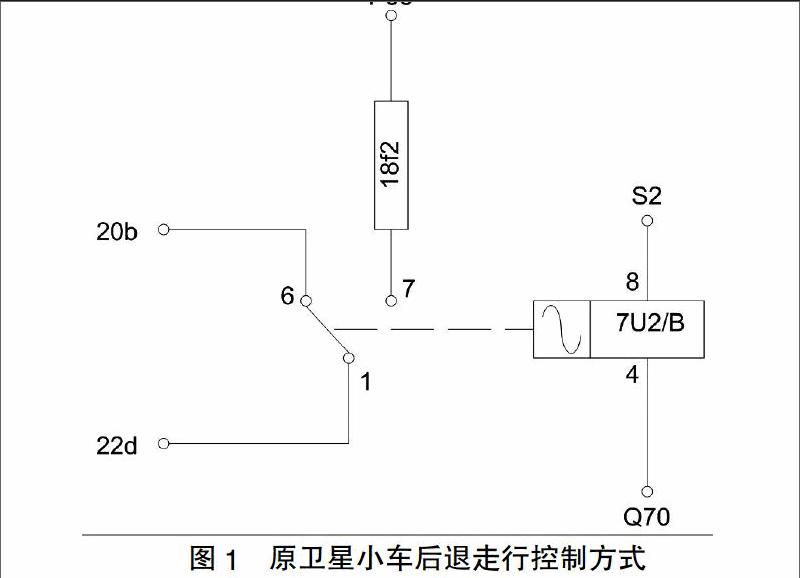
在原设计中,DCL-32连续式捣固车卫星小车后退走行的电气控制方式为:卫星小车单独手动后退时,程控系统[3]产生卫星小车后退信号Q70。Q70是一个低电平,Q70差生则继电器7U2/B动作,继电器的1脚和7脚接通。此时,P53端子的-10V电压经过可变电阻18f2分压后进入卫星小车控制板10U8/22d,然后输出一个电流到卫星小车走行比例阀控制卫星小车向后走行。当主机向后走行时,同样产生卫星小车后退信号Q70,控制卫星小车自动向后走行(图1)。
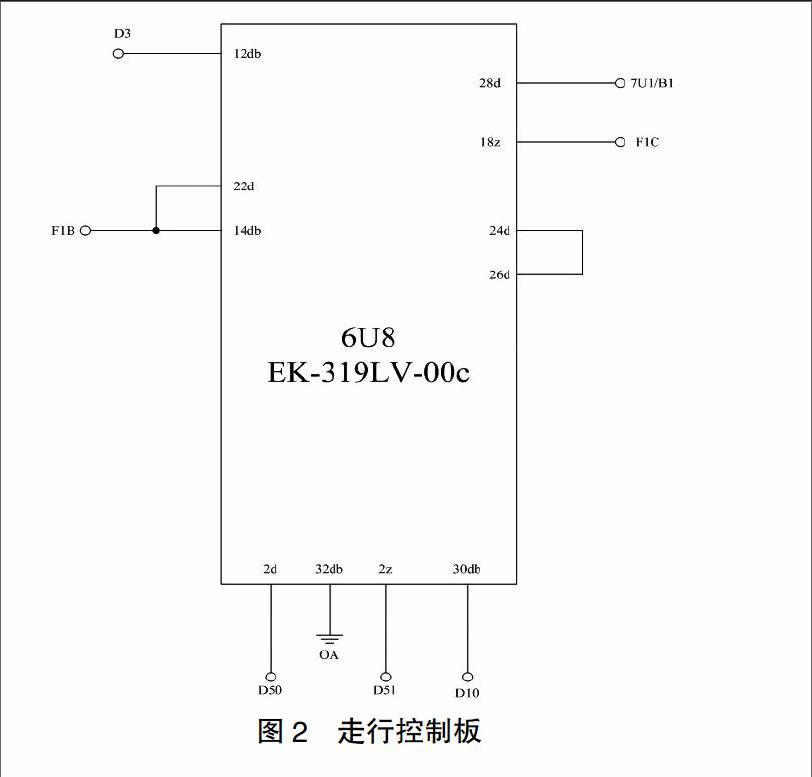
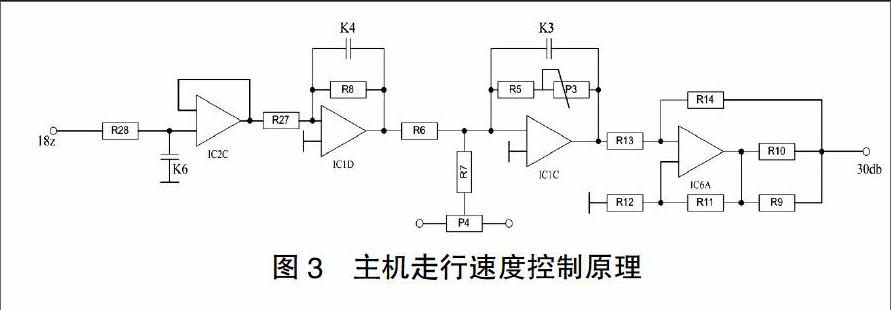
DCL-32连续式捣固车主机向前或向后走行速度快慢的调节则是通过调节B19箱操作面板上的旋钮19f40或19f40a,使输入走行控制板6U8/18z的电压F1C产生变化,从而使6U8/30db输出的电流产生变化来控制的(图2、图3)。
也就是说,不管是卫星小车手动向后走行还是自动向后走行,其走行速度的快慢都是取决于18f2的阻值大小,而主机走行速度的快慢可以通过B19箱操作面板上的旋钮19f40或19f40a来方便的进行调节。在原有控制方式下,随时通过调节18f2的阻值大小来调节卫星小车走行速度的快慢以匹配主机走行,是基本不具备可操作性的。
2.3 优化方案
要使卫星小车向后走行和向前走行一样,速度快慢随主机速度自动变化,可以利用走行控制板6U8/30db随旋钮给定而变化的电压,经过一系列继电器控制,将其引入到卫星小车控制板10U8/22d,就可以实现。
通过实际测量,在DCL-32连续式捣固车自动走行工况下,走行速度为2km/h时,速度给定旋钮19f40或19f40a给定的电压大约为4.6V,6U8/30db输出电压大约为1V;走行速度为1km/h时,速度给定旋钮19f40或19f40a给定的电压大约是3.1V,6U8/30db输出电压大约为0.68V。而卫星小车控制板10U8/22d的输入电压接近-10V。也就是说6U8/30db输出的电压直接输入10U8/22d的话过低,且要使卫星小车后退,需要的是一个负电压。因此需要设计运算电路把6U8/30db输出的电压放大并换向。一个简单的反相比例运算电路就可以实现这一功能(图4)。在反相比例运算电路中,输入信号Ui通过电阻R1接入到运放的反相输入端,同相输入端通过电阻R2接地。输出信号通过可变电阻P1接入到反相端,引入深度负反馈。由公式Auf可知,该电路的电压放大倍数只与反馈网络的参数P1和R1有关,与运放无关[4]。根据设计方案,放大倍数10倍即可以满足要求。因此选择R1为1kΩ的电阻,P1为10kΩ的可变电阻。同时为满足运放工作条件,引入±15V电源P50、P51和地OA。
具体优化方案是:在原有控制电路中增加三个继电器。可以利用B7电气箱中已有的备用继电器。继电器型号为DS2E-M-DC24V,是双联继电器,共有8个脚。其中线圈正极是8脚,负极是4脚;1脚、6脚和7脚为一联,1脚6脚常闭,1脚7脚常开;2脚、3脚和5脚为一联,3脚5脚常闭,5脚2脚常开。用到的继电器分别是7U2/C、7U2/D、7U2/E(图5)。同时需利用后退走行信号Q09,卫星小车前位信号X1C,卫星小车后位信号X22来控制继电器动作。
当卫星小车手动后退时,与改进之前一样,程控信号Q70使继电器7U2/B动作,P53的-10V电压经过18f2分压后进入10U8/22d,控制卫星小车后退走行。当主机向后走行时,程控信号Q90使继电器7U2/D动作,走行控制板6U8/30dbz与继电器7U2/B的7脚接通。同时程控信号Q70也产生,控制继电器7U2/B动作,使走行控制板6U8/30dbz输出的电压经比例运算电路U1后输入卫星小车控制板10U8/22d,使卫星小车控制板10U8/22d的输入电压随着主机走行速度快慢而变化,即实现卫星小车后退走行速度随主机走行速度变化。
同时,考虑到向后走行时卫星小车速度与主机走行速度不可能完全一致。增加由卫星小车后位信号X22控制的一组继电器7U2/C。当向后走行时,程控信号Q90产生,控制继电器7U2/C动作,使7U2/C的5脚与数字地信号OD接通。若卫星小车速度比主机速度快,追上主机,产生了卫星小车后位信号X22,则继电器7U2/C动作,7U2/C的1脚与OD接通,使卫星小车2.5bar制动信号Q26产生,控制功率板产生QL26信号,卫星小车2.5bar制动风阀得电,产生制动,使卫星小车减速。卫星小车后位信号X22消失,则卫星小车恢复原有速度。若卫星小车速度比主机慢,产生卫星小车前位信号X1C时,继电器7U2/E动作,使继电器7U2/E的1脚与6脚断开,7U2/D复位。此时卫星小车速度快慢和手动后退时一样,由18f2控制。卫星小车前位信号X1C消失,则卫星小车恢复原有速度。
向前走行时继电器7U2/B不动作,卫星小车走行控制与原有控制一样。
根据优化后控制方式的特点,比例运算电路中的可变电阻P1可以调节自动走行时卫星小车后退电流的大小。为了使卫星小车落后时能较快追赶上主机,在调试过程中可以将卫星小车手动后退的电流调得偏大一些。
3 结语
通过以上对DCL-32连续式捣固车卫星小车走行控制方式的优化,实际使用中卫星小车后退走行时速度快慢不能随主机速度变化的情况得以大大改善,可以大大提高卫星小车液压驱动马达的寿命。同时也提高了设备使用过程中的舒适性,同时使操作人员不必再对后退走行速度进行繁琐的调节。本方案充分利用了DCL-32连续式捣固车原有的闲置继电器7U2/C、7U2/D、7U2/E,增加的反相比例运算电路构成简单,工作稳定,成本低廉。
由于向前和向后走行时使用的都是卫星小车控制板上的同一路控制,调试过程中需要兼顾向前和向后走行时卫星小车与主机之间的匹配情况,调试难度有所提高。希望能够通过今后进一步的研究,弥补这一缺憾。
在大型养路机械的生产制造和使用过程中,应多多了解产品不足,根据市场需求不断改进和完善产品,增强自主创新能力,为铁路提供先进、高效、优质的产品。
【参考文献】
[1]杨新军,张文东,胡跃进,毛必显.大型养路机械检修技术基础[M].成都:西南交通大学出版社,2005:14-15.
[2]铁道部运输局基础部,大型养路机械综合管理工作指南[M].北京:中国铁道出版社,2002:635-637.
[3]韩志青,唐定会.抄平起拨道捣固车[M].北京:中国铁道出版社,2006:218-245.
[4]毛必显,刘铁军,张坤.大型养路机械电子电路技术基础[M].成都:西南交通大学出版社,2005:114-126.
[责任编辑:王楠]
猜你喜欢
日用电器(2023年7期)2023-09-07
橡塑技术与装备(2021年5期)2021-03-16
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2019年23期)2019-02-23
电子制作(2018年8期)2018-06-26
火控雷达技术(2016年2期)2016-02-06
机电信息(2014年26期)2014-02-27
机电信息(2014年23期)2014-02-27
机电信息(2014年20期)2014-02-27