刀锋300C无人机飞行控制技术研究
2016-03-24 07:19胡宝宝
甘肃科学学报 2016年1期
徐 峰,胡宝宝,杜 庆
(61243部队,新疆 乌鲁木齐 830000)
刀锋300C无人机飞行控制技术研究
徐峰,胡宝宝,杜庆
(61243部队,新疆 乌鲁木齐 830000)
摘要为了提高刀锋300C无人机的飞行控制能力,更好地服务于遥感测绘方面的航拍任务,通过对其飞行控制技术进行研究,在原有的技术基础上,归纳出了更有效的作业方法,并提出了航迹规划的改进方案,解决了原有方案中存在的问题。从而提高了作业效率,也增加了无人机的飞行安全,得到了满足要求的测绘产品。
关键词无人机;飞行控制;航迹规划;航拍
刀锋300C无人机是我国自主研制的一款小型低空无人机[1,2],该机在航拍过程中的飞行控制已经基本实现了自动化,但智能化程度不够[3],操作人员工作强度较大,容易出现操作不当,从而造成严重的飞行事故。因此,对无人机飞行控制系统进行完善,达到随时解决各种突发情况的目的,就显得尤为重要。
1飞行控制流程
接收飞行任务后,首先现场勘察航拍作业飞行区域,确定航拍起始点坐标、起始航向、航线长度。根据相机参数、像元尺寸、分辨率、重叠度确定飞行高度、航向间距和拍照间距,然后再根据这些参数编写飞行文件,包括航迹规划和降落回收,并适时上传至无人机自驾仪,从而完成对无人机的飞行控制[4]。刀锋300C无人机飞行控制流程如图1所示。
2飞行参数计算自动化的实现
无人机在航迹规划之前,需计算出航拍高度、航向间距、旁向间距。航拍高度由地面分辨率、相机焦距、像元尺寸计算得到;航向间距(曝光点间距)通过任务设计的航向重叠度、相机参数与飞行高度可以确定;旁向间距则由任务设计的旁向重叠度、相机参数与飞行高度确定。
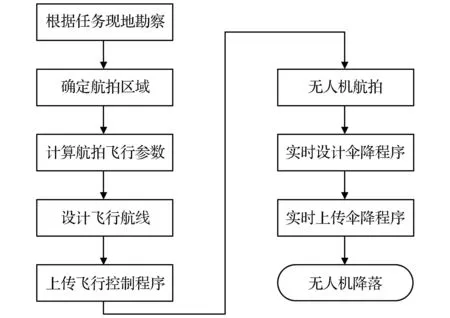
图1 刀锋300C无人机飞行控制流程Fig.1 Chart of flight control procedure of unmannedaerial vehicle of Daofeng 300C
通过Excel表格公式将各种参数之间的关系连接起来。由于其任务载荷固定为Canon 5D Mark II,因此相机参数为定值,每次计算时,只需要将任务设计的变量输入。800 m航拍参数计算结果如表1所列,其中后四项是根据任务手动填写的。
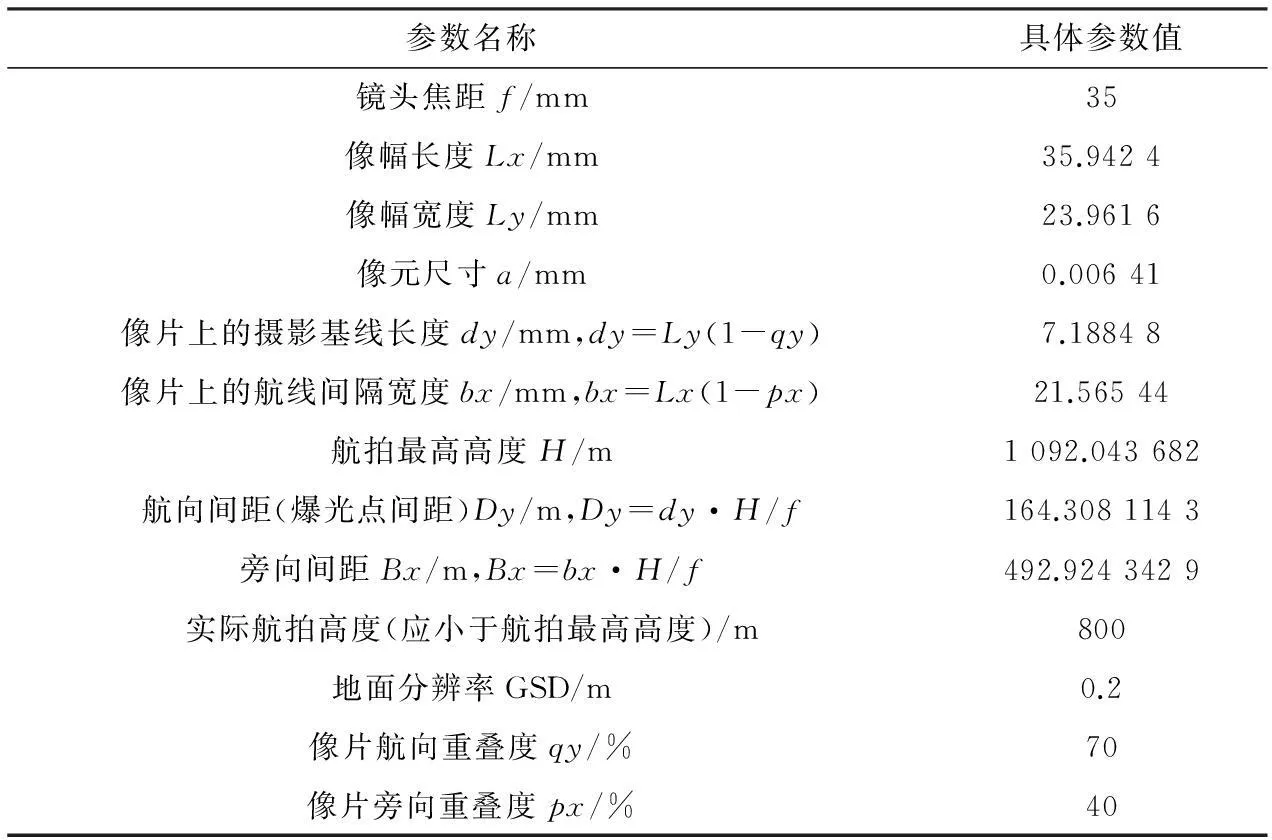
表1 800 m航拍参数计算结果
3航迹规划设计与实现
计算出飞行参数后,开始进行航迹规划[5,6]。在确定好风向后(飞机必须迎风或逆风航拍),航迹规划如图2所示,方框内为任务航拍区域。这种方法在拍摄过程中,无人机的无效飞行区域(任务区域之外)较大,大大影响了作业效率,同时增加了作业风险。
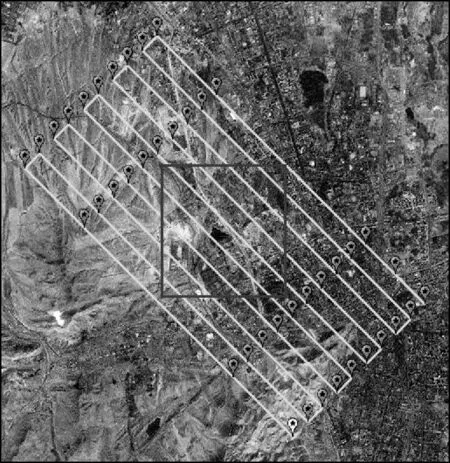
图2 刀锋300C传统航迹规划Fig.2 Traditional path planning of Daofeng 300C
针对这一现象,设计了一种新的航迹,如图3所示。在原有的基础上,通过严格计算改变原有飞行文件中的经纬度坐标,使其在覆盖任务区域的前提下,减少无效飞行。通过两种航迹对比,无人机飞行10个航带,新的航迹规划可使飞机少飞近20 km,提高了作业效率。
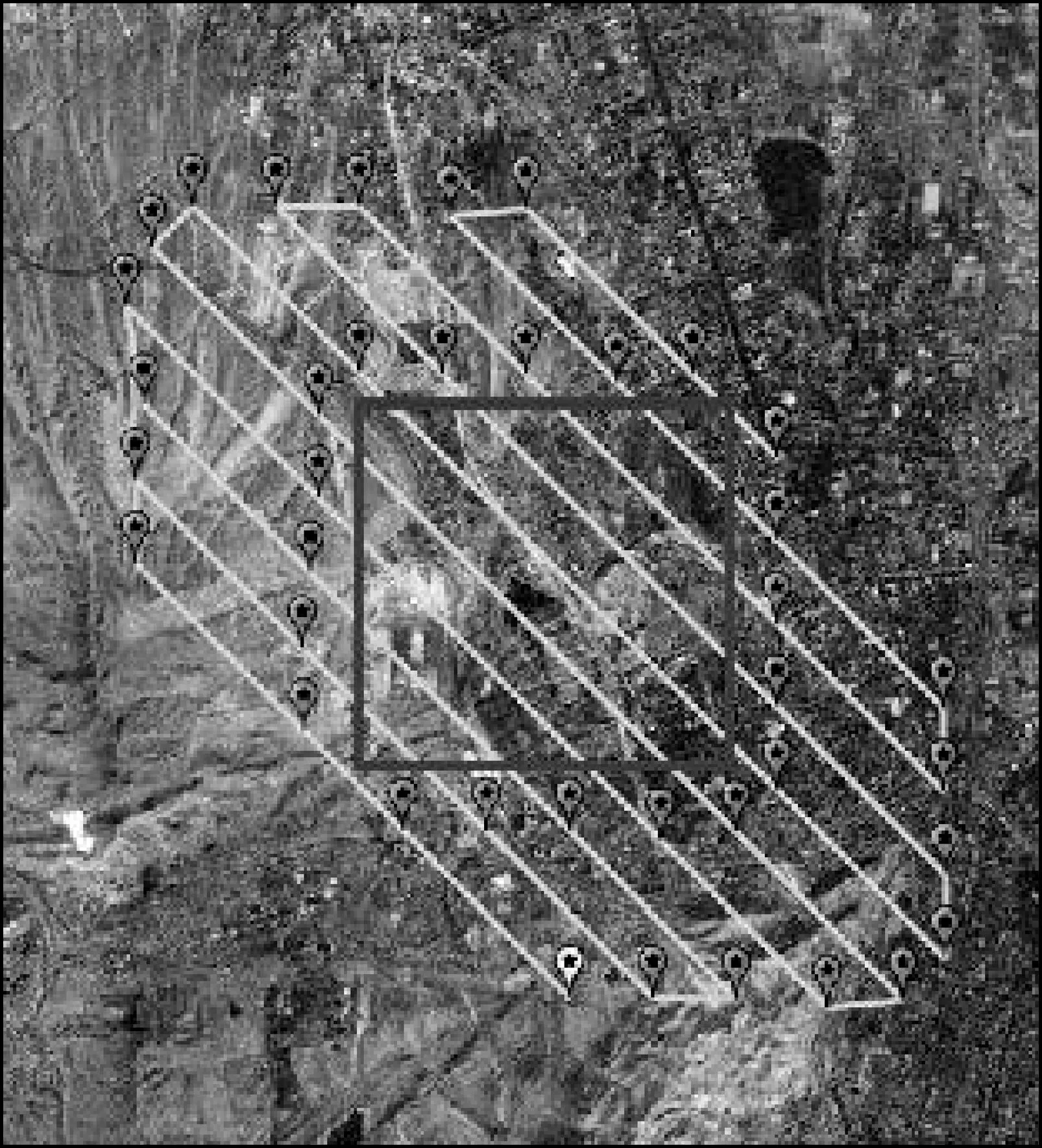
图3 刀锋300C新的航迹规划Fig.3 New path planning of Daofeng 300C
4增加航路点设计与实现
飞行控制是指无人机离开地面后,由自动驾驶仪对无人机进行的控制[7]。原有的控制文件中,航路点较为单一,只有完成任务所必须的节点才设为航路点,没有考虑在航拍时应对突变的风向,不能快速调整航线,如图4所示。
在不影响正常航拍的前提下,增加航路点,如图5所示。由于每一个航路点都对应一行程序语句,所以在飞行过程中只能在地面站拉动下一个航路点,从而改变下一行程序语句,达到改变的目的。原有的航路点过少,导致调整余地较少,不够灵活多变。而通过提前增加航路点,可使飞行控制更加自如,尤其是在伞降过程中,通过移动航路点,能够更好地使无人机迎风降落。
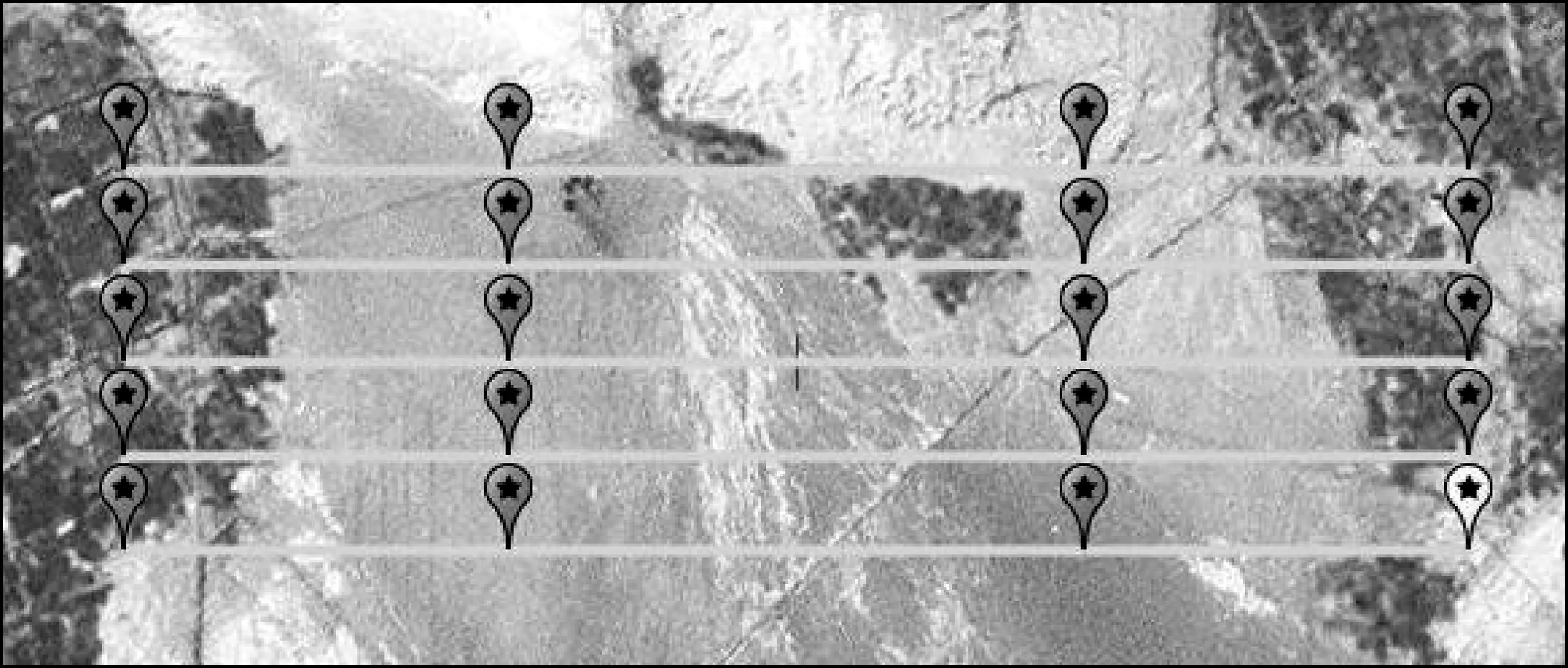
图4 飞行原定航迹Fig.4 Flight path scheduled
图5 飞行实际航迹Fig.5 Actual flight path
5实时上传方案设计与实现
飞行文件的实时上传,确保了刀锋300C无人机完成任务的灵活性,也提高了飞机的可控性和安全性。原有的实时上传方案是两次上传,先上传飞行作业(包括盘旋上升阶段)程序,等到作业完成后,确定实时风向,再上传伞降程序,从而完成任务。但是飞机在盘旋上升过程中,盘旋圈数的确定需要考虑海拔、发动机温度等多个方面,如果没到预定高度就开始作业,将会使任务不能正常进行,增加了无效飞行时间[8]。
研究可将实时上传分为三个阶段:首先上传飞机盘旋上升程序,观察其是否到达航拍高度;到达航拍高度后,再上传飞行作业程序;完成作业后,上传伞降程序。通过实际飞行可以看出,将飞机盘旋上升程序和飞行航拍作业程序分别上传后,对飞机爬高过程的控制更加合理,缩短了作业时间的同时,也增加了飞机的安全系数。
6改进前后的飞行结果
在原有飞行控制方法的基础上进行改进,使得刀锋300C无人机在参数计算上更加便捷,在压入航线进行航拍时更加平稳,保证了影像覆盖率达到任务要求。在某测区的航拍过程中,采用传统方案得到的DOM(正射影像)产品[9]如图6所示,旁向重叠不稳定,导致在制作DOM时会有漏洞,且精度不高。而采用新的方案后得到的DOM如图7所示,解决了传统方案出现漏洞的问题,提高了精度,从而满足任务需求。
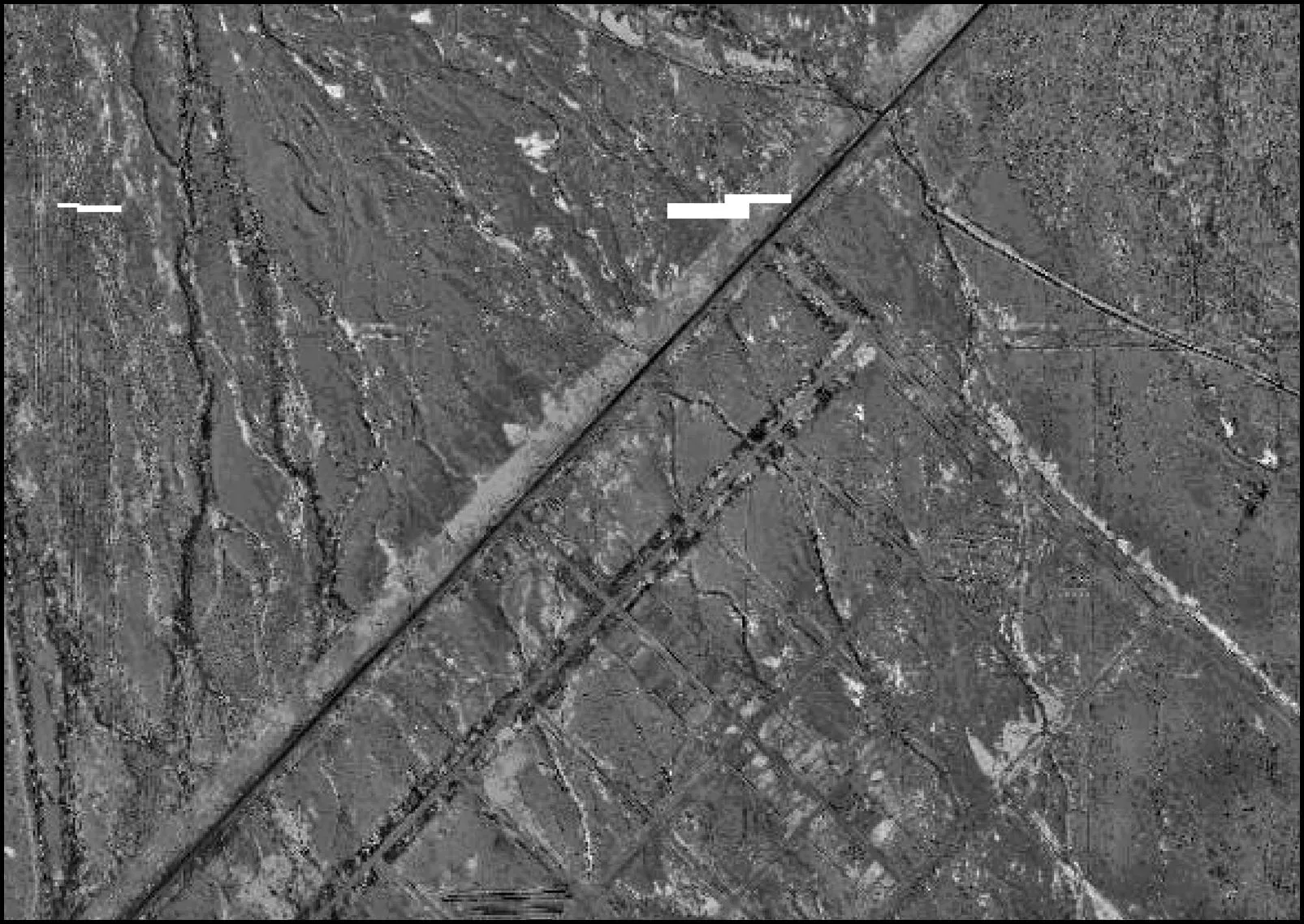
图6 改进前DOMFig.6 DOM before improvement
图7 改进后DOMFig.7 DOM after improvement
7结语
通过对刀锋300C无人机的飞行控制技术改进,有效弥补了传统方案中的缺陷,确保地面站操作人员快速高效地完成航迹规划、飞行文件编写等作业步骤,增强了对无人机的飞行控制能力,从而更好地承担多样化测绘任务。
参考文献:
[1]海鹰航空通用有限责任公司.无人机操作使用手册[Z].沈阳:海鹰公司,2013.
[2]万刚,张鹏强,曹雪锋,等.无人机测绘技术及应用[M].北京:测绘出版社,2010.
[3]总参谋部测绘导航局.无人机测绘系统飞行训练与应用论文集[C].北京:解放军出版社,2014.
[4]张强,沈建京,吴云东.测绘型无人机系统飞行控制率的设计与实现[J].中南大学学报:自然科学版,2013,58(S2):138-144.
[5]王俊,周树道,朱国涛,等.无人机航迹规划常用算法[J].火力与指挥控制,2012,37(8):5-8.
[6]陈海,王新民,焦裕松,等.一种凸多边形区域的无人机覆盖航迹算法[J].航空学报,2010,46(9):1 802-1 808.
[7]常波,王瑞.基于几何法的无人机航迹规划[J].计算机系统应用,2015,24(1):109-113.
[8]胡海燕,徐敏.无人机飞行控制系统的自抗扰姿态稳定控制[J].遥测遥控,2012,37(3):62-67.
[9]程宝琴,武坚,崔振,等.利用SRTM数据修测高山区地貌的探讨[J].甘肃科学学报,2015,27(2):25-27.
Study on Flight Control Technology of Unmanned Aerial Vehicle Based on Daofeng 300C
Xu Feng,Hu Baobao,Du Qing
(No.61243ofPLA,Urumqi830000,China)
AbstractMore effective operating method was concluded on basis of former technologies through researching the flight control technology thereof in order to improve flight control ability of unmanned aerial vehicle of Daofeng 300C and apply the flight control technology to aerial photo in aspect of remote sensing survey; and the improvement scheme of the path planning was proposed,which solved the problems in the former scheme.Therefore,the operating efficiency and the flight safety of the unmanned aerial vehicle are improved,and the surveying and mapping products meeting requirements are accessible.
Key wordsUnmanned aerial vehicle;Flight control;Path planning;Aerial photo
中图分类号:V249.122
文献标志码:A
文章编号:1004-0366(2016)01-0073-04
作者简介:徐峰(1977-),女,甘肃庆阳人,硕士,高级工程师,研究方向为遥感测绘.E-mail:shuoer0805@163.com.
收稿日期:2015-03-23;修回日期:2015-07-20.
doi:10.16468/j.cnki.issn1004-0366.2016.01.017.
引用格式:Xu Feng,Hu Baobao,Du Qing.Study on Flight Control Technology of Unmanned Aerial Vehicle Based on Daofeng 300C[J].Journal of Gansu Sciences,2016,28(1):73-76.[徐峰,胡宝宝,杜庆.刀锋300C无人机飞行控制技术研究[J].甘肃科学学报,2016,28(1):73-76.]
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
时代邮刊·下半月(2020年9期)2020-09-23
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
作文通讯·高中版(2017年6期)2017-07-10
陕西画报(2017年1期)2017-02-11
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26