
涂布机张力的检测与控制
2016-03-23 06:28:07庞少朋韩武
印刷技术·包装装潢 2016年2期
庞少朋 韩武
在现代制造产业中,张力控制系统已经成为包括涂布行业在内的多个行业的共性基础技术之一。尤其在包装印刷等精密涂布行业,高精度张力控制系统已经成为保证涂布效果的支撑性关键技术。
包装印刷用涂布机主要由放料单元、储料单元、涂布单元、复合单元以及收料单元等部分组成(如图1所示)。其张力控制系统包括放料单元、放料储料架、涂胶单元、收料储料架和收料部。操作人员必须了解涂布机张力检测的原理、清楚涂布过程中保持张力稳定的方法,才能确保涂布过程的稳定和精确。笔者结合多年的工作经验,以陕西北人高端涂布机Y299D为例,对涂布机张力检测与控制系统进行简单分析,与同行共享。
涂布机的张力检测
涂布机张力检测机通过摆辊和电位器来实现张力的检测,摆辊和电位器通过齿轮来连接。定义电位器各个端头的线号分别为P+、U、P-和PG。其中,规定电位器P+和PG之间的电压为+10V,P-和PG之间的电压为-10V。当张力设定值和张力反馈值相同时,U和PG之间的电压为0V;当张力值发生变化时,即摆辊发生摆动,U和PG之间的电压也会随之变化,从而达到张力检测的目的,有效控制张力稳定。
放料单元的张力控制
涂布机一般设置两个放料单元,Y299D中第一放料单元为被动放料。被动放料系统由磁粉、张力控制器和张力检测传感器构成。第一放料单元的技术已经非常成熟,从放料单元到放料储料单元,张力可始终保持稳定。
第二放料单元为主动放料。在放料过程中,由于放卷卷径不断减小,所以放料摆辊会不断参与张力的控制,这一过程主要由PLC和PID控制器来实现。其中,PLC控制器可计算放卷卷径,并控制相应的电机不断加速,以保持张力稳定;PID控制器则在放料摆辊位置发生偏移时,根据采集的偏差信号,通过计算实现放料电机转速的微调,保证张力稳定。
放料储料架及放料过程的张力控制
放料储料架可实现放料时的零速接料。由于涂布基材的成本比较高,要求的张力较大,且涂布工艺比较特殊,采用普通搭接法无法满足生产要求,因此涂布机的放料储料架与其他设备较为不同。
在正常情况下,放料储料架应储满基材,以节省放料辊的换料时间。因此,在设备启动前应先检查放料储料架的状态,保证放料储料架储满基材,为放料做好准备。
当放料单元需要换料时,按下接料按钮,放料储料架电机开始加速,放料牵引电机开始减速。在这个过程中,放料牵引摆辊控制放料牵引电机,放料储料架电机跟随主机速度,当放料储料架的速度与主机速度相同时,放料牵引电机的速度降为零。此时,放料牵引摆辊由原本控制放料牵引电机切换为控制放料储料架电机,从而保证放料张力稳定,顺利进行零速接料。
完成放料工作后,按下接料完成按钮,放料储料架电机开始减速,放料牵引电机开始加速,同时放料牵引摆辊开始控制放料牵引电机,当放料储料架电机速度减为零时,放料牵引电机速度与主机速度相同。随后,放料储料架开始以零速上升储料,直到升至设定速度。此时,放料牵引电机的速度为主机速度加上放料储料架的上升速度,以满足该过程的张力稳定。当储料完成后,放料储料架电机开始匀速减速,直至速度为零。放料牵引电机也开始减速,并在放料储料架电机降为零时,降至与主机相同的速度。
上述为一个完整的放料过程,在这个过程中,张力从放料牵引到涂胶单元始终保持稳定,满足了涂布工艺的要求,实现了张力的时时稳定控制。
涂胶单元的张力控制
涂胶辊的周长固定不变,所以涂胶辊电机的转速为主机速度加上摆辊的调节速度。安川H1000变频器内部的PID控制器可满足涂胶单元到复合单元之间的张力微调控制。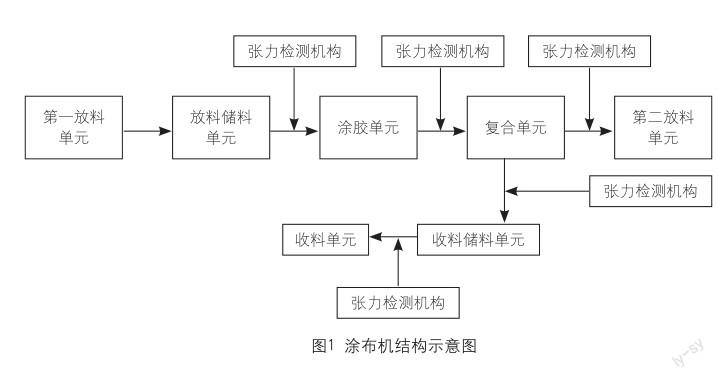
收料储料架及收料过程的张力控制
涂布机工艺多样,要求收料时预驱轴处于静止状态,因此,涂布机应具备收料储料架机构。在设备启动前,应先检查收料储料架的位置,调整储料架使其以一定速度自动下降至储料机构下端,准备好接料。
当收料轴需要换料时,按下接料按钮,收料储料架从零开始加速,同时,收料牵引和收料当前轴开始减速。在此过程中,收料牵引摆辊控制收料牵引电机,收料储料架电机跟随主机速度,当收料储料架电机的速度与主机速度相同时,收料牵引和收料当前轴的速度减为零。此时,收料牵引摆辊由原本控制收料牵引电机切换为控制储料架电机,从而保证收料张力稳定。随后,收料刀架进行相应的动作,完成收料工作。
收料动作完成,收料大臂落下后,收料储料架电机开始减速,收料牵引和收料当前轴开始加速。在这个过程中,收料牵引摆辊控制收料牵引电机,当收料储料架电机速度减为零时,收料牵引电机和收料当前轴速度与主机速度相同。然后,收料储料架以零速向下加速,直到加速至设定速度。此时,收料牵引电机和收料当前轴的速度为主机速度加上收料储料架的下降速度,以满足复合单元到收料储料架、收料储料架到收料单元的张力稳定。当收料储料架下降至减速标志后,开始匀速减速,直至速度为零。收料牵引和收料当前轴也开始减速,并在收料储料架速度降为零时,速度降至与主机相同的速度。
上述是一次完整的收料过程,在这个过程中,张力从复合单元到收料牵引、从收料牵引到收料当前轴始终保持稳定。
猜你喜欢
川菜(2023年10期)2023-11-02 06:29:03
新农业(2023年14期)2023-08-31 07:29:46
机电工程技术(2023年1期)2023-02-24 05:20:46
橡塑技术与装备(2022年2期)2022-02-14 03:13:42
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
科技创新与生产力(2020年11期)2020-11-19 06:48:56
科技创新与生产力(2020年10期)2020-10-13 12:01:16
佛山陶瓷(2019年10期)2019-11-29 09:05:03
中华诗词(2018年4期)2018-08-17 08:04:12
宝藏(2017年6期)2017-07-20 10:01:02
