
移栽机穴盘苗定位取苗装置的设计
2016-03-23 07:21:50马亚朋
农机化研究 2016年10期
马 振,胡 斌,马亚朋
(石河子大学 机械电气工程学院,新疆 石河子 832000)
移栽机穴盘苗定位取苗装置的设计
马振,胡斌,马亚朋
(石河子大学 机械电气工程学院,新疆 石河子832000)
摘要:目前,我国的机械化程度还处于初级阶段,和日本、美国等国家还有着很大的差距。为此,鉴于我国新疆地区大面积的种植模式,针对人工移栽穴盘苗存在的劳动强度大、成本高、移栽周期长、移栽效率低等问题,设计了一种穴盘苗移栽机定位取苗装置。该装置利用双摇杆式定位推苗气吹取苗,完成对穴盘的准确定位,同时打破钵苗与穴盘间的粘结力。该定位取苗装置结构简单、成本低,对增加农民的经济收入及解决育苗移栽技术大面积推广问题具有重要意义。该技术有利于促进农业机械化,对大面积种植模式,尤其是新疆地区,具有促进作用。
关键词:移栽机;穴盘苗;定位;取苗装置
0引言
新疆地处我国西北地区,目前是全国最大的番茄、甜菜、棉花等经济作物生产基地;但由于无霜期短,温度变化率大,不宜于早播。新疆地区团场大部分番茄酱厂规模较小,吞吐量有限,收获期大量番茄积压,造成番茄腐烂,给农民造成很大的经济损失。因此,需要使番茄成熟期错开,而采用育苗移栽的方法可有效地避开气候因子对经济作物的影响,缩短作物的生长发育期,提早作物成熟期,能够有效地提高经济作物的产量,增加团场农民的收入[1-2]。
育苗移栽技术作为一种培植技术,有着直播不可比拟的优势,可以提前作物的生育期,有效地避开作物受早春低温、倒春寒等气候的影响,提高幼苗的成活率,保证单位幼苗株数达到农艺要求,能延长作物生育期并有效地提高单产和作物的品质,具有显著的节本、增产、增收效果。为了保证作物有适当的空间,以促进扎根和生长,需要进行移栽[3]。
长期以来,旱地农作物的移栽主要由人工完成,劳动强度大、移栽效率低,因而自动化移栽机应运而生。我国目前的移栽机主要是采用机械手自动取苗的方式,夹苗速度快,工作可靠;但机械手在夹苗时容易对苗杆造成损伤,降低了移栽质量。气吹式移栽机采用气力投苗,对苗体的损伤较小,但穴盘的准确定位是气吹式移栽机顺利工作的前提。穴盘定位装置是气吹式移栽机的重要组成部分,但目前存在着结构复杂及成本较高等问题。为此,设计了一种双摇杆式定位推苗气吹取苗、完成对穴盘的准确定位、同时打破钵苗与穴盘间粘结力的穴盘苗移栽机定位取苗装置。该定位取苗装置结构简单、成本低,对解决育苗移栽技术大面积推广具有重要意义。
1整体结构与工作原理
1.1 工作原理
根据穴盘立式取苗器的工作原理和性能要求,其结构主要由定位摇杆机构、吹苗装置、卡盘架及检测装置及机架组成。当穴盘在卡盘架中时,根据检测装置得到的检测信号,通过电磁铁的作用,控制摇杆机构的运动方向,进而控制穴盘定位摇杆分支杆及滚子的位置,实现控制穴盘的下落和停止。当穴盘停止时,气嘴进入穴盘孔,通过射流冲击的作用,将苗体吹出到输送带上,实现取苗。
1.2 整体结构设计
移栽机定位取苗装置结构如图1所示。该装置主要分为检测部分、传动装置和吹苗装置,3个部分相互作用,实现定位取苗。
2取苗过程的分析
取苗过程分为3个阶段:上盘准备阶段、初始工作阶段和正常工作阶段,工作流程如图2所示。
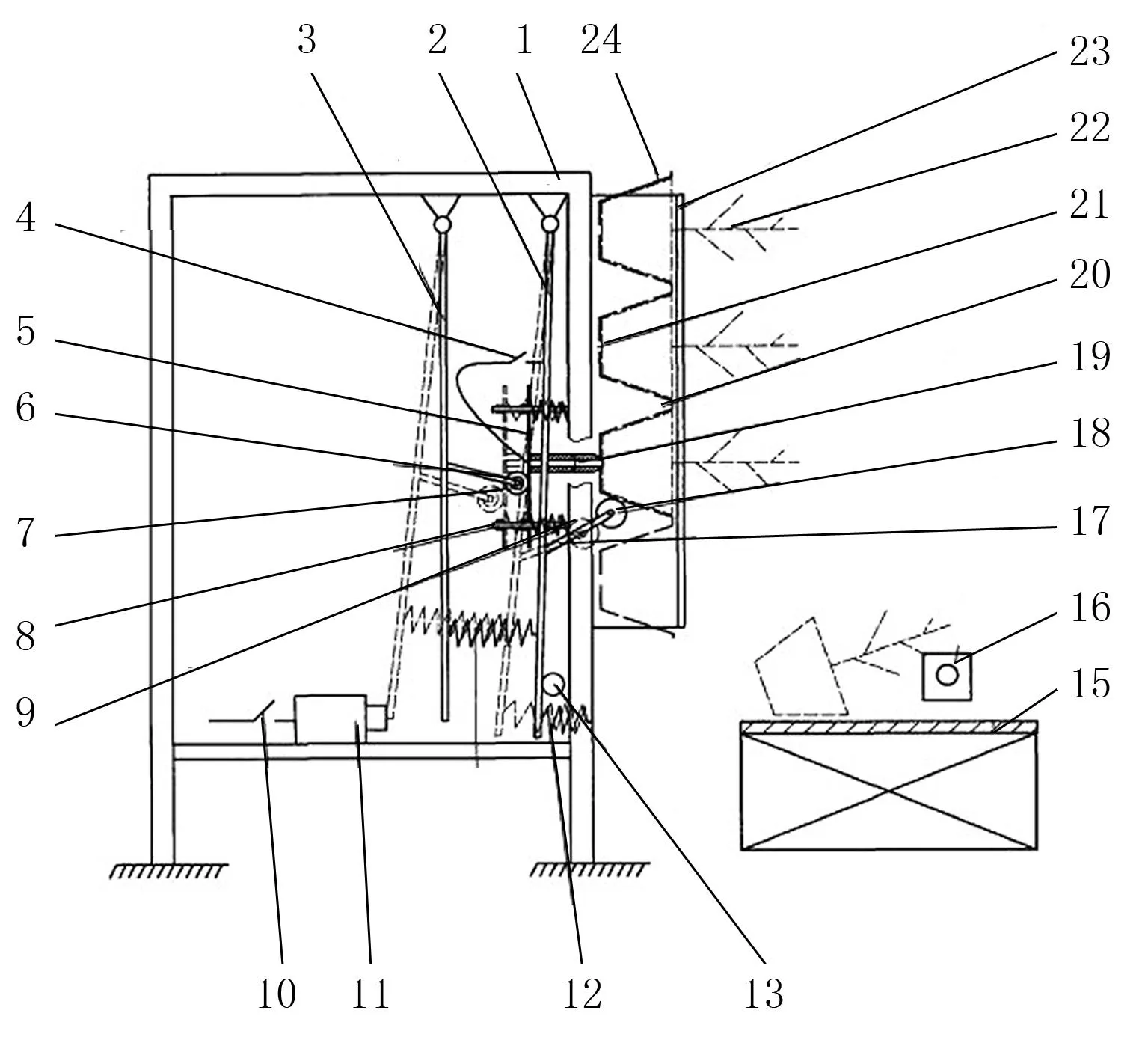
1.机架 2.穴盘定位摇杆 3.推苗摇杆 4.气流阀
Fig.1Locating and pick-up seedling device of the transplanting machine structure diagram

图2 工作流程图
1)上盘准备阶段:此时输送带不动,开始上穴盘,电源开关闭合,初始限位开关打开,电磁铁通电;推苗摇杆向电磁铁方向转动,气嘴回位,穴盘定位摇杆在初始限位开关作用下静止,第1个穴盘的V型槽停在滚子B上。
2)初始工作阶段:输送带转动,检测装置开始工作;此时没有检测到苗钵,检测信号控制电源开关断开,气嘴固定板跟随推苗摇杆向穴盘方向运动,气嘴进入穴盘孔,打破苗钵与穴盘的粘结力;气流阀打开产生一个射流冲击将苗钵吹出到输送带上,初始限位开关闭合,穴盘定位摇杆可以转动,当第1排苗钵被吹落到输送带上时初始工作阶段结束。
3)正常工作阶段,第1排苗钵落到输送带上,检测装置检测到苗钵,检测信号控制电源开关闭合,气嘴离开穴盘孔;之后,穴盘定位摇杆向电磁铁方向运动,滚子B离开V型槽,此时电源开关经过短暂闭合后自动打开,滚子B沿着穴盘底部滚动,直到遇到下一个V型槽,滚子B进入V型槽;最后,推苗摇杆在拉伸弹簧A作用下向穴盘方向运动,气嘴进入穴盘孔,气流阀打开产生射流冲击,吹落第2排苗钵。
3取苗装置的机构设计
3.1 传动装置的设计及分析
取苗装置的传动装置部分如图3所示。

1.机架 2.穴盘定位摇杆 3.推苗摇杆 4.气流阀
传动装置的作用是通过传动机构和传动力等的共同作用实现穴盘的准确定位、取苗,其结构主要包括盘定位摇杆、推苗摇杆、分支杆和压缩弹簧等。为了保证传动装置的位置精度和结构稳定,对传动装置进行了如下设计:穴盘定位摇杆的上端和机架上部铰接在一起,穴盘定位摇杆的下端通过拉伸弹簧A与机架侧部连接;穴盘定位摇杆上设有穴盘定位摇杆分支杆,穴盘定位摇杆分支杆的末端套着滚子B,滚子B和穴盘之间滚动接触;推苗摇杆的上端和机架上部铰接在一起,电磁铁设在机架下,电源开关与电磁铁连接,推苗摇杆的下端靠近电磁铁,推苗摇杆通过拉伸弹簧A与穴盘定位摇杆连接在一起,推苗摇杆分支杆的末端套着滚子A。通过上述的结构布局和设计,保证了传动装置的定位准确性。
进入正常工作阶段之后,穴盘定位摇杆和推苗摇杆的运动存在先后顺序。当电源开关闭合时,推苗摇杆在电磁力作用下向电磁铁方向转动,推苗摇杆分支杆末端的滚子A随着推苗摇杆向电磁铁方向运动,在压缩弹簧的作用力下,气嘴固定板向电磁铁方向运动,始终和滚子A保持接触;随后,穴盘定位摇杆在拉伸弹簧A的作用下克服拉伸弹簧B的拉力向电磁铁方向转动,穴盘定位摇杆分支杆末端的滚子随着穴盘定位摇杆向电磁铁方向运动,离开穴盘背面的V型槽;穴盘在重力作用下向下运动,在这个运动过程中推苗摇杆和气嘴先动,穴盘定位摇杆和滚子B后动。
3.2 吹苗装置的设计及分析
吹苗装置主要包括穴盘、卡盘架、气嘴及压缩弹簧等。为了实现吹苗功能,滚子A和气嘴固定板的板面滚动接触,气嘴固定板和机架的侧部之间通过压缩弹簧连接,气嘴均匀分布在气嘴固定板上;初始限位开关设在穴盘定位摇杆一侧,卡盘架设在机架的侧外部,卡盘架内设有穴盘,如图4所示。
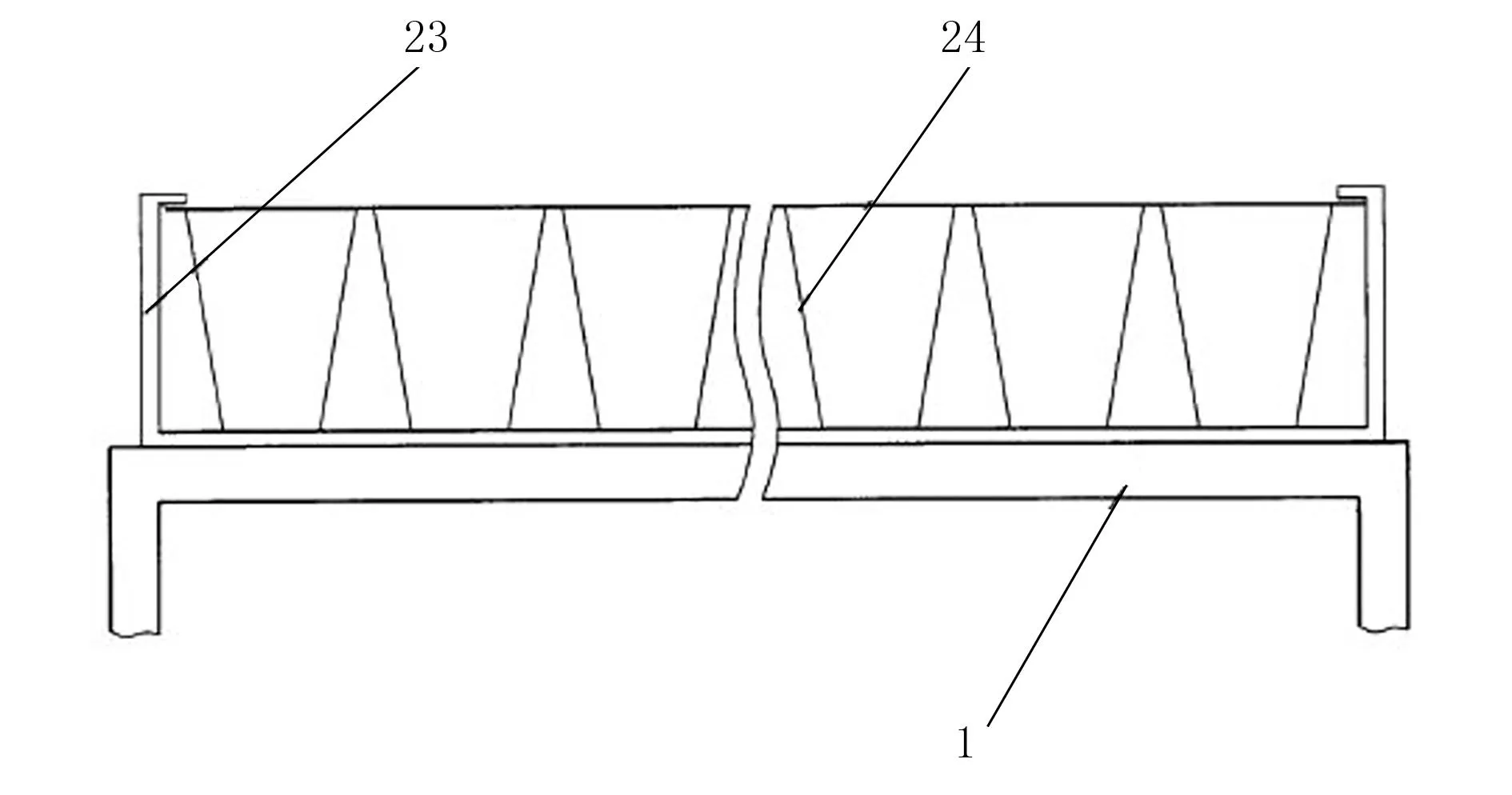
1.机架 23.卡盘架 24.穴盘
当电源开关打开时,穴盘定位摇杆受到拉伸弹簧A的拉力;当穴盘背面的V型槽在重力作用下运动到滚子B处时,穴盘定位摇杆向穴盘方向转动,滚子B卡在V型槽处,推苗摇杆在拉伸弹簧A作用下向穴盘方向运动;气嘴固定板受到滚子A给予的压力克服压缩弹簧的阻力向穴盘方向运动,气嘴进入穴盘孔,打破钵苗与穴盘间的粘结力,气流阀打开产生射流冲击,吹落钵苗。
为了保证气嘴能够顺利进入穴盘孔,气嘴应设置成头部呈圆锥状,并且圆锥的小端直径小于穴盘上每个穴盘孔的直径,圆锥的大端端直径大于穴盘孔的直径,使得气嘴进入穴盘孔时,头部刚好卡在穴盘孔里,气嘴最顶端进入穴盘孔,推动穴盘里的苗钵,打破苗钵与穴盘的粘结力,气嘴通气产生射流冲击将苗钵吹出。气嘴放大示意图如图5所示。
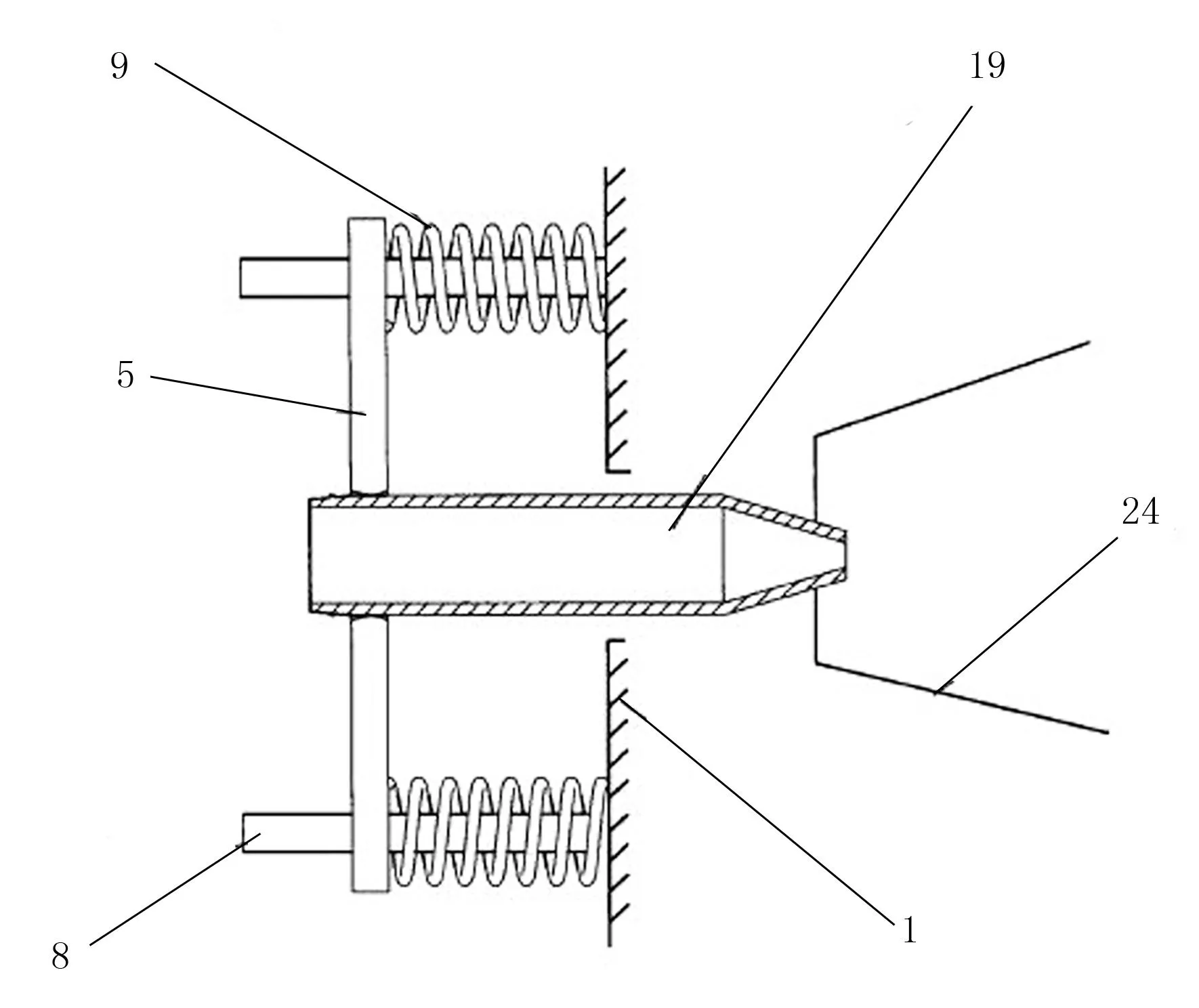
1.机架 5.气嘴固定板 8.弹簧定位杆
当电源开关闭合时,气嘴固定板跟随推苗摇杆首先向电磁铁方向运动,之后穴盘定位摇杆才向电磁铁方向运动";当电源开关打开时,穴盘定位摇杆首先向穴盘方向运动,之后气嘴固定板才在推苗摇杆作用下克服压缩弹簧阻力向穴盘方向运动。
4结论
1)介绍了移栽机定位取苗装置的工作原理和工作过程,对关键部分即传动装置及吹苗装置进行了设计与分析。该装置结构简单,加工制造容易,稳定性好,成本低。
2)设计的穴盘苗移栽机定位取苗装置,实现了双摇杆式定位推苗气吹取苗,完成对穴盘的准确定位,可以有效提高移栽效率,对育苗移栽技术大面积推广具有重要意义。
3)该装置虽然在一定程度上提高了移栽率,但是各种苗对穴盘、穴盘架等的要求不一样,不能实现较高的通用性,所以需要进一步优化机构,进行试验和调整,设计出通用性强的移栽机定位取苗装置。
参考文献:
[1]于晓旭,赵匀,陈宝成,等.移栽机发展现状与展望[J].农业机械学报,2014,45(8):44-53.
[2]张振国,曹卫彬,王侨,等.穴盘苗自动移栽机研究现状与发展前景[J].农机化研究,2013,35(5):237-241.
[3]张振国,曹卫彬,王鹏,等.番茄穴盘苗自动移栽机顶杆式取苗装置的设计[J].农机化研究,2013,35(4):72-75.
[4]赵晓伟,韩长杰,赵占军,等.新疆地区辣椒、番茄移栽机发展现状及趋势[J].农业科技与装备,2015(5):41-43.
[5]杜立恒,俞高红,张国风,等.高速插秧机钵体毯状苗纵向送秧装置的设计与试验[J].农业工程学报,2014,30(14):17-25.
[6]杨传华,方宪法,杨学军,等.基于PLC的蔬菜钵苗移栽机自动输送装置[J].农业机械学报,2013,44(S1):19-23.
[7]裘利钢,俞高红.蔬菜钵苗自动移栽机送苗装置的设计与试验[J].浙江理工大学学报,2012,29(5):683-687.
[8]韩长杰.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013,29(8):51-60.
[9]田昆鹏,毛罕平,胡建平,等.自动移栽机门形取苗装置设计与试验研究[J].农机化研究,2014,36(2):168-172.
[10]严宵月,胡建平,吴福华,等.整排取苗间隔放苗移栽机设计与试验[J].农业机械学报,2013,44(S1):7-13.
[11]韩长杰,郭辉,张学军,等.硬质穴盘苗自动取苗装置设计[J].农业工程,2013(4):99-102.
[12]刘效亮,李其昀.育苗移栽机械化发展方向[J].山东理工大学学报,2003,17(3):108-110.
[13]徐丽明,张铁中,史志清.玉米自动移栽机取苗机构的设计[J].中国农业大学学报,2000,5(4):58-60.
[14]武科,陈永成,毕新胜.集中典型的移栽机[J].新疆农机化,2009(3):12-14.
[15]陈建能,王伯鸿,任根勇,等.蔬菜移栽机放苗机构运动学模型建立与参数分析[J].农业机械学报,2010,41(12):48-53.
[16]陈达,周丽萍,杨学军,等. 移栽机自动分钵式栽植器机构分析与运动仿真[J]. 农业机械学报,2011,42(8):54-57,69.
[17]马瑞峻,区颖刚,赵祚喜,等.水稻钵苗机械手取秧有序移栽机的改进[J].农业工程学报,2003,19(1):113-116.
[18]俞高红,陈志威,赵匀,等. 椭圆-不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J].机械工程学报,2012,48(13):32-39.
The Design of the Locating and Pick-up Seedling Device of the
Seedling of the Transplanting Machine
Ma Zhen, Hu Bin, Ma Yapeng
(Machinery and Electricity Engineering College, Shihezi University, Shihezi 832000,China)
Abstract:At present, our country is still in the primary stage of mechanization, and there is a big gap compared with Japan, the United States and other countries. In view of large area planting pattern in the area of Xinjiang, artificial transplanting plug seedling has the problem of large labor intensity, high cost, long transplanting period and low efficiency of transplanting. We design a kind of plug seedling transplanting machine and this device is a double rocker type locating, push seedling, gas blowing seedling, which complete the accurate positioning of the plug and break the bond between the seedling and plug. The location of the device is simple in structure and low in cost, which is of great significance for increasing the economic income of farmers and promoting the popularization of seedling transplanting technology.At the same time, it is beneficial to promote agricultural mechanization, and it has the promotion effect to the large area planting pattern, especially in Xinjiang area.
Key words:transplanting machine; plug seedling; locate; pick-up seedling device
中图分类号:S223.94
文献标识码:A
文章编号:1003-188X(2016)10-0079-04
作者简介:马振(1993-),男,安徽马鞍山人,硕士研究生,(E-mail)18255183270@163.com。通讯作者:胡斌(1968-),男,湖北英山人,教授,硕士生导师,(E-mail)hb_mac@shzu.edu.cn。
基金项目:国家自然科学基金项目(51365047)
收稿日期:2015-11-10
猜你喜欢
园艺与种苗(2023年7期)2023-08-11 04:52:24
中学生数理化·七年级数学人教版(2022年6期)2022-06-05 06:50:48
中国农业大学学报(2021年9期)2021-11-09 10:47:50
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
山东林业科技(2019年2期)2019-06-03 10:11:08
新疆农垦科技(2018年3期)2018-04-24 08:17:28
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
农家科技下旬刊(2017年5期)2017-06-20 18:55:11
电子制作(2016年19期)2016-08-24 07:49:36
