
酿酒葡萄收获机输送装置运动分析及仿真
2016-03-23 07:21袁盼盼张学军坎杂李成松杨兰涛
农机化研究 2016年10期
关键词:收获机
袁盼盼,张学军,坎杂,李成松,靳 伟,杨兰涛
( 1.新疆农业大学 机械交通学院,乌鲁木齐 830052;2.石河子大学 机械电气工程学院,新疆 石河子 832000)
酿酒葡萄收获机输送装置运动分析及仿真
袁盼盼1,张学军1,坎杂2,李成松2,靳伟1,杨兰涛2
( 1.新疆农业大学 机械交通学院,乌鲁木齐830052;2.石河子大学 机械电气工程学院,新疆 石河子832000)
摘要:酿酒葡萄收获机输送装置由导轨、集果系统、传动系统及辅助部件组成。对驱动拨爪链的多边形效应进行了运动学分析,得出驱动拨爪链速度及速度不均匀系数的关系表达式。利用ADAMS对装置输送链的运动过程和受力进行了仿真,获得两链轮的角速度、角加速度、转矩及驱动拨爪链条的速度、加速度的变化规律,且得知从动链轮相对主动链轮运动平稳。
关键词:收获机;酿酒葡萄;输送装置;ADAMS;
0引言
葡萄可分为酿酒葡萄和鲜食葡萄[1]。新疆是我国最早引种和栽培葡萄的地区[2-3],种植面积在不断扩大,但其收获目前完全依靠人工,劳动强度大、效率低、采收费用高,机械化采收是酿酒葡萄产业发展的必然趋势[4-6]。由于国内外酿酒葡萄种植模式与生长特点存在一定差异,国外收获机械并不适用于新疆酿酒葡萄的收获[7-8]。输送装置是酿酒葡萄收获机的主要组成部分,用于收集和输送酿酒葡萄至料箱[9-10]。
本文对酿酒葡萄收获机输送装置进行了运动学分析及仿真,研究驱动拨爪链和输送链轮间的相互作用,分析驱动拨爪链的多边形效应,探索主要结构参数间的关系及其对驱动拨爪链动载荷等性能的影响,对提高酿酒葡萄收获机输送装置的工作性能具有重要的意义。
1装置总体结构
酿酒葡萄收获机输送装置由导轨、集果系统(戽斗、连接架)、传动系统(双铰接链条、驱动部件)及辅助部件(挡板、出料口)等构成,形成两侧对称的“回”形输送结构,如图1所示。工作时,收获机进行单行作业,骑跨于某一葡萄行上,输送装置分布在葡萄藤的两侧,经驱动部件驱动链运动;戽斗在双铰接链的带动下以顺时针方向进行输送作业,直至将酿酒葡萄输送至出料口。传动系统由驱动部件与双铰接链组成,驱动部件安装于导轨两侧的倾斜段,用于驱动双铰链运动。
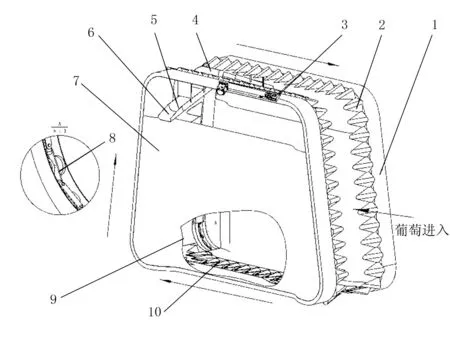
1.导轨 2.戽斗 3.驱动部件 4.顶部挡板 5.出料口
驱动部件由驱动马达、主动链轮、从动链轮、驱动拨爪链条、双排滚子链等构成,如图2所示。驱动拨爪链条上设置多个具有固定距离的拨爪相续挂接,与双铰接输送链配合运动。马达输出的动力经双排滚子链传动传递给驱动拨爪链条,由驱动拨爪链条上的拨爪拨动双铰接输送链使其在导轨中向前移动。
2传动系统分析
工作时,驱动拨爪链条与双铰接链配合运动,驱动拨爪链带动长度6m的双铰接链运动,因驱动拨爪链做扰动性传动,易出现在链条运动过程中不稳定和抖动问题,使得驱动拨爪链和输送链轮处于冲击和脉动负荷的作用环境中。在运动过程中,驱动拨爪链条的线速度呈现周期性变化[11-15]。输送装置结构及驱动拨爪链速度分析如图3所示,齿数与速度关系如图4所示。设输送链轮分度圆半径为r,齿数为z,链轮角速度为ω,链条间的铰接点在啮入链轮上的相位角为β,根据图3中的速度分解关系,可得驱动拨爪链的线速度满足如下公式,即
(1)
式中v —驱动拨爪链线速度(m/s);
vx—驱动拨爪链前进方向的分速度(m/s);
vy—驱动拨爪链垂直方向的分速度(m/s);
P—输送链轮的节距(m)。
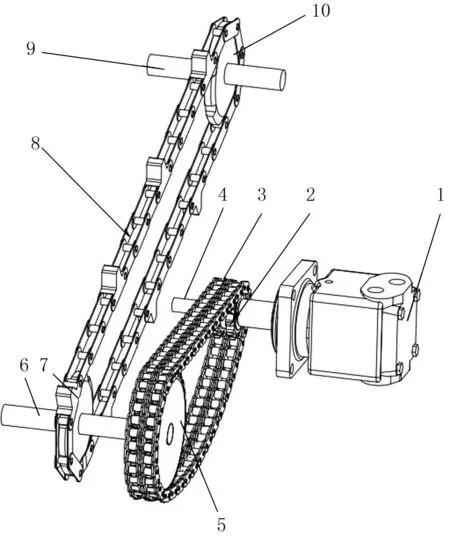
1.驱动马达 2.主动链轮1 3.双排滚子链
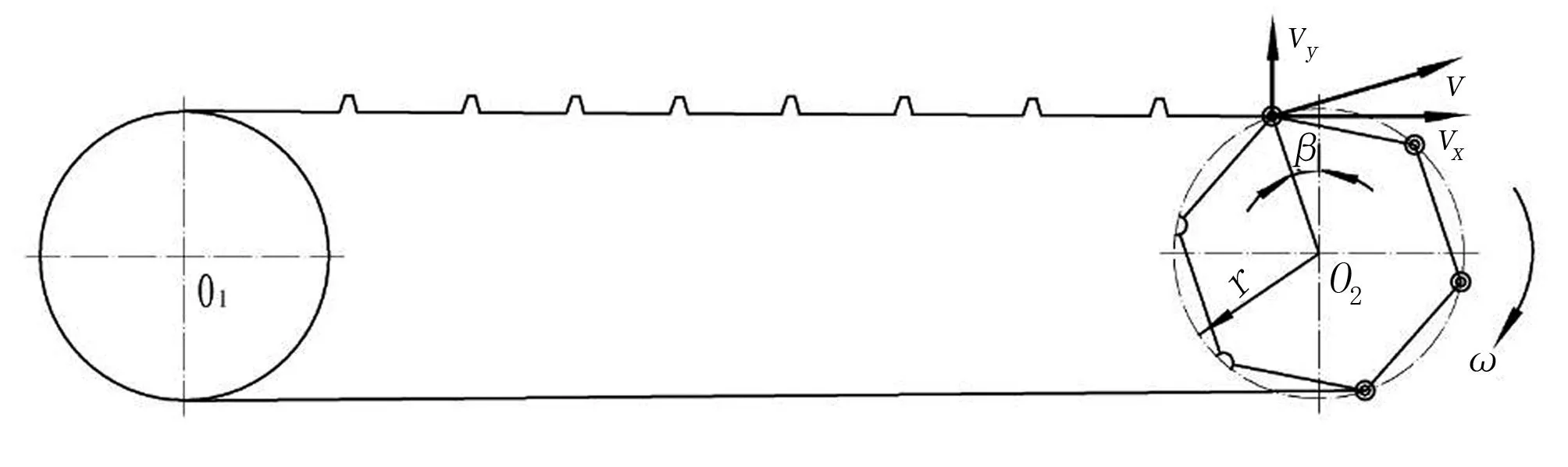
图3 驱动拨爪链速度关系

图4 齿数与速度关系
由公式(1)及图4可知:在节距P一定的条件下,驱动拨爪链线速度随着齿数的增加而增大。由于相位角β是变化的,即使主动链轮转速恒定,驱动拨爪链的运动速度也是变化的;其前进或垂直方向的线速度均为周期变化,且每转动一个链节,驱动拨爪链条速度周期重复变化一次。在节距P一定的条件下,驱动拨爪链的齿数越少,链条啮合的相位角范围越大,而驱动拨爪链条的速度的变化范围越小。由链传动的工作原理可知:驱动拨爪链前进方向分速度vx主要引起驱动拨爪链中心距方向运动的忽快忽慢,影响驱动拨爪链前进方向的运动平稳性和链条间的张紧程度;驱动拨爪链垂直方向的分速度vy使得链条上下运动,产生振动和噪音,对驱动拨爪链的动量和冲击载荷影响较大。采用链条的瞬时速度的不均匀系数K,表示驱动拨爪链条速度的变化程度及其瞬时速度的不均匀性,则
(2)
式中K—驱动拨爪链条速度的不均匀系数;
vm—驱动拨爪链条平均线速度(m/s)。
(3)
因此,驱动拨爪链在前进方向的速度不均匀系数满足上述关系,根据公式(3)可作出不同齿数时的速度不均与系数变化曲线,如图5所示。
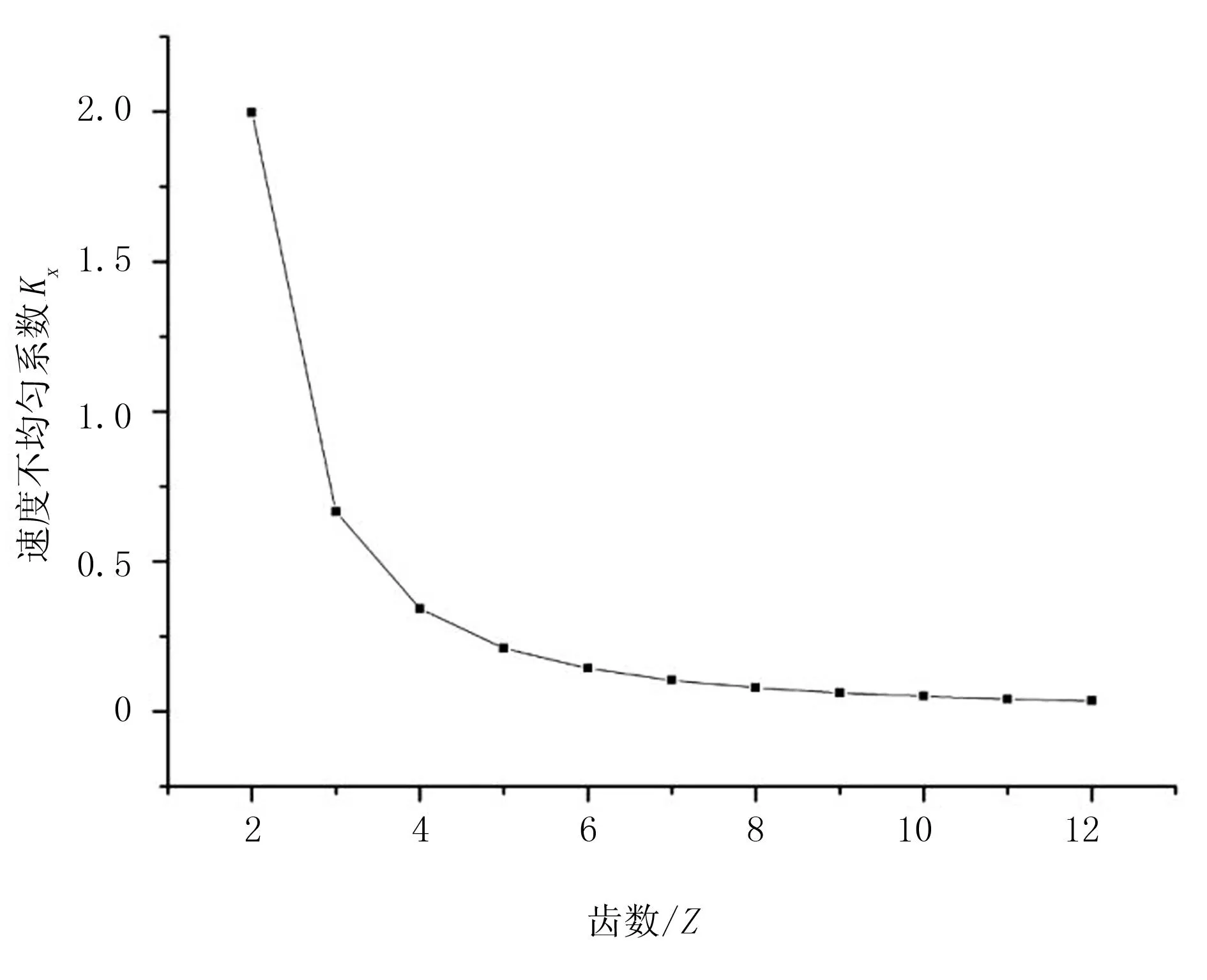
图5 速度不均匀系数曲线
由图5可知:链轮的齿数越多,驱动拨爪链条的速度不均匀系数越小,输送装置运行越平稳。由图5可看出:当链轮齿数大于10时,速度不均匀系数K小于0.05,在可控允许误差范围内。由驱动拨爪链的线速度与链轮齿数的关系图可知:驱动拨爪链速度随着齿数的增加而增大,且垂直方向的最大分速度值随着输送链的齿数的增加而增大。为了减少驱动拨爪链的动量冲击,链轮的齿数选择10较为合适。
同理,驱动拨爪链的加速度为
(4)
式中ax—驱动拨爪链前进方向的加速度(m/s2);
ay—驱动拨爪链垂直方向的加速度(m/s2)。
3传动系统动力学仿真
3.1 建立模型设置参数
结合导入模型的实际情况,增设添加质量、运动副、接触和载荷。设定导入的输送链零部件材料为刚体,质量属性为钢,在输送链的前后输送链轮质心与两转轴之间分别添加固定副,并选择两个物体一个连接点,使两根轴与输送链轮同步转动;在两个链轮中心创建与转轴之间的旋转副。驱动拨爪链条由链轮驱动,在驱动拨爪链条与两个链轮之间添加接触副,刚度系数100 000N/mm,阻尼系数10N·s/mm,穿透深度0.1mm,静摩因数0.3,动摩擦因数0.1;同时,驱动拨爪链条之间也添加接触副,静摩擦因数0.12,动摩擦因数0.1;在输送链轮中心处施加一个速度型驱动。仿真模型如图6所示。
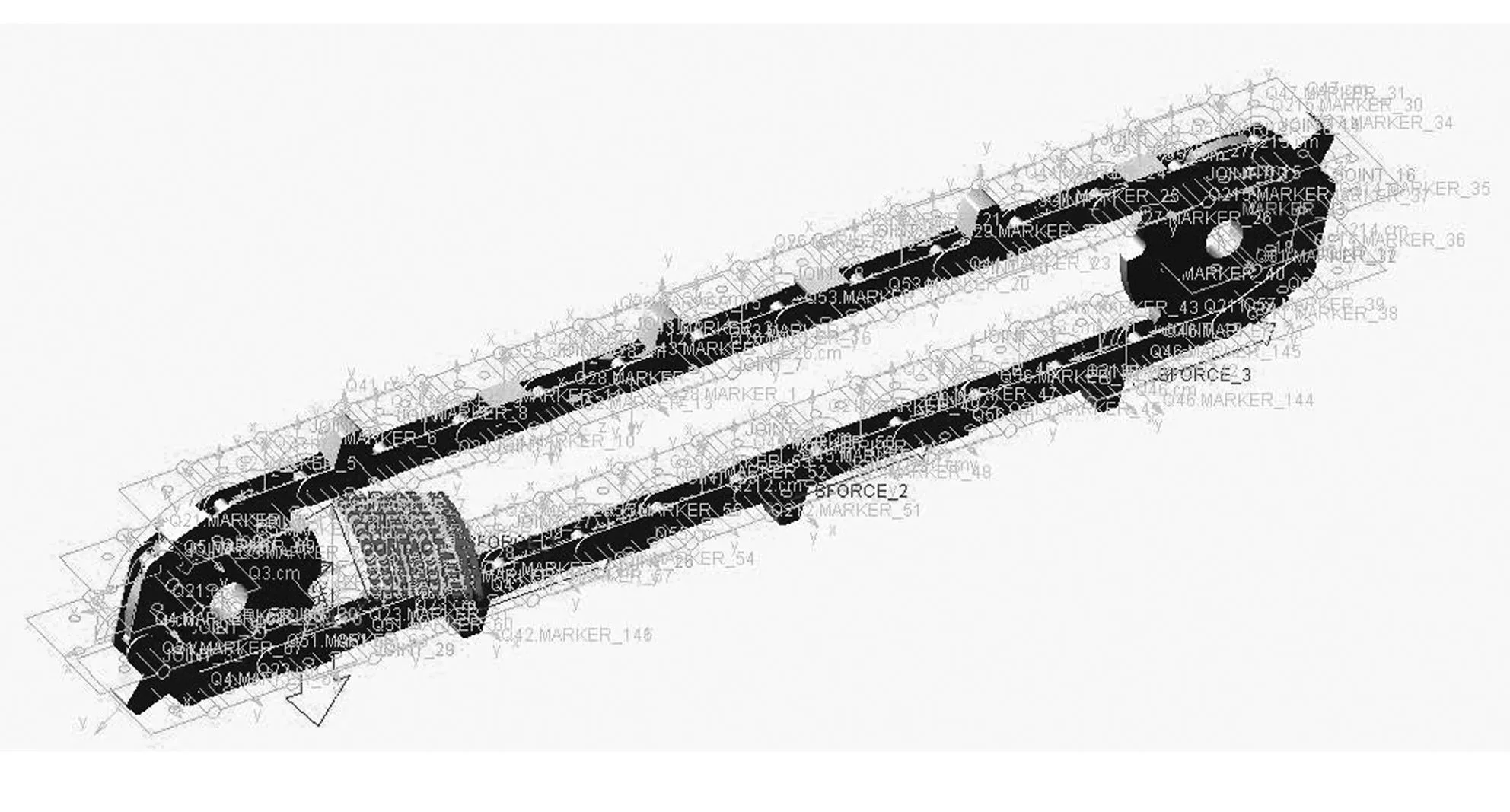
图6 仿真模型
3.2 仿真分析
启用重力,设置仿真时间为2.0s,仿真步长为300步,选用I3求解器。利用ADAMS/Postprocessor后处理模块获取接触力、速度、加速度、转矩曲线。
由于输送链传动具有多边形效应,驱动拨爪链条与链轮刚刚接触时受力较大,接触部分会产生较大震荡。驱动拨爪链条的接触力变化曲线如图7所示。从图7可看出:链条的传动周期约为1.5 s,在启动0.5s内,链条与主动链轮的接触力波动震荡较大,并随着链轮的转动趋于稳定。在链条与链轮接触传动的过程中,由于链轮的多边形效应,链条的接触力波动明显,大约0.7s之后链条运动趋于平稳,接触力也达到稳定。
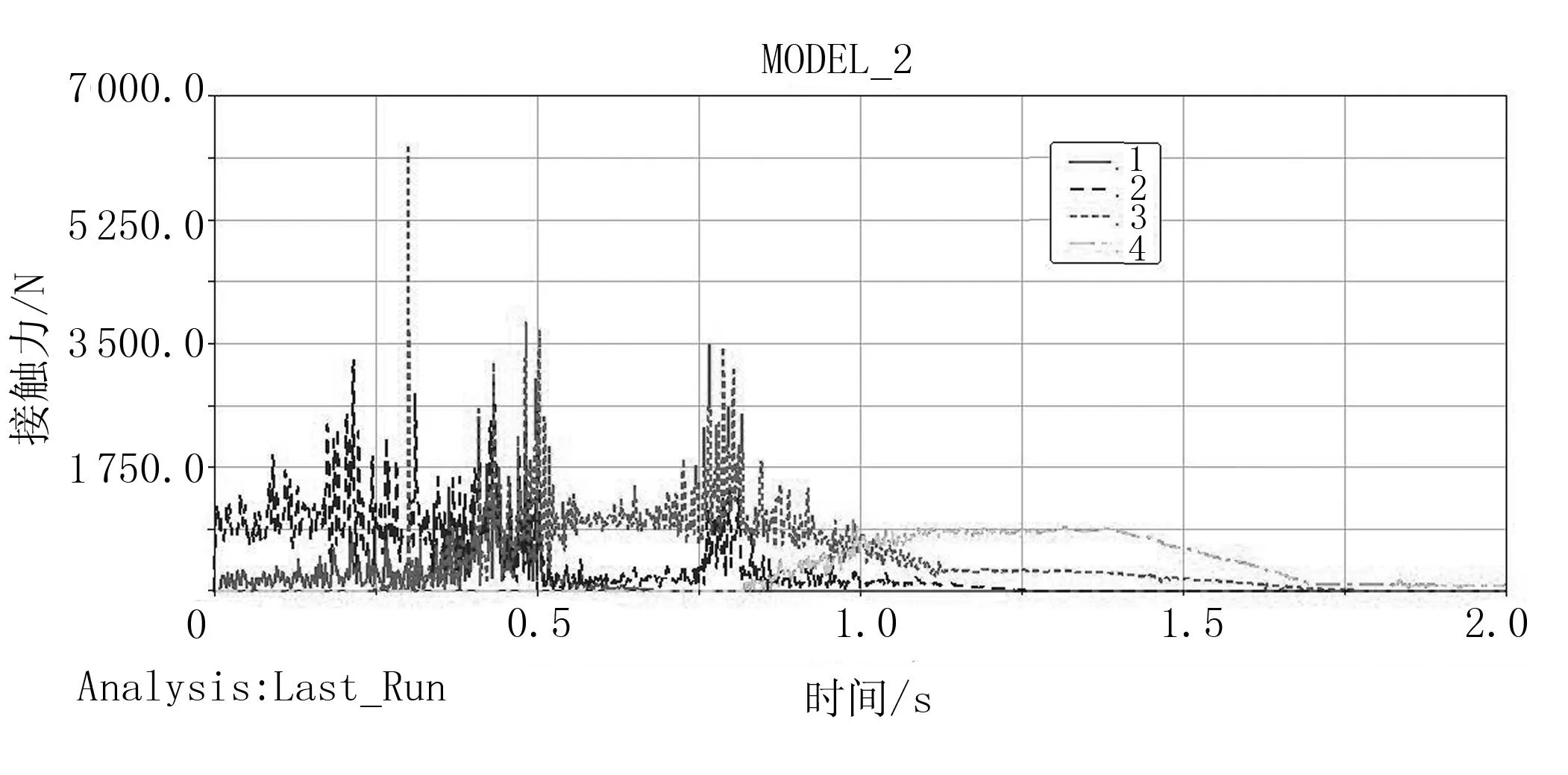
图7 驱动拨爪链条的接触力变化曲线
链条在传动过程中处于一张一弛的小幅抖动状态。由于链轮与链条间摩擦力的存在,两个链轮存在一定的运动差异。测量得到主、从动链轮的角速度、角加速度及转矩图,如图8~图10所示。
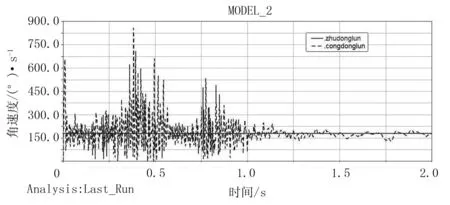
图8 主、从动链轮的角速度曲线
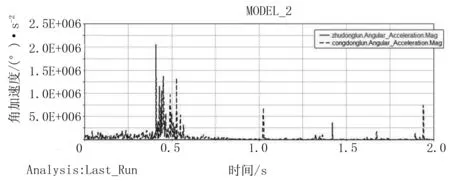
图9 主、从动链轮的角加速度曲线
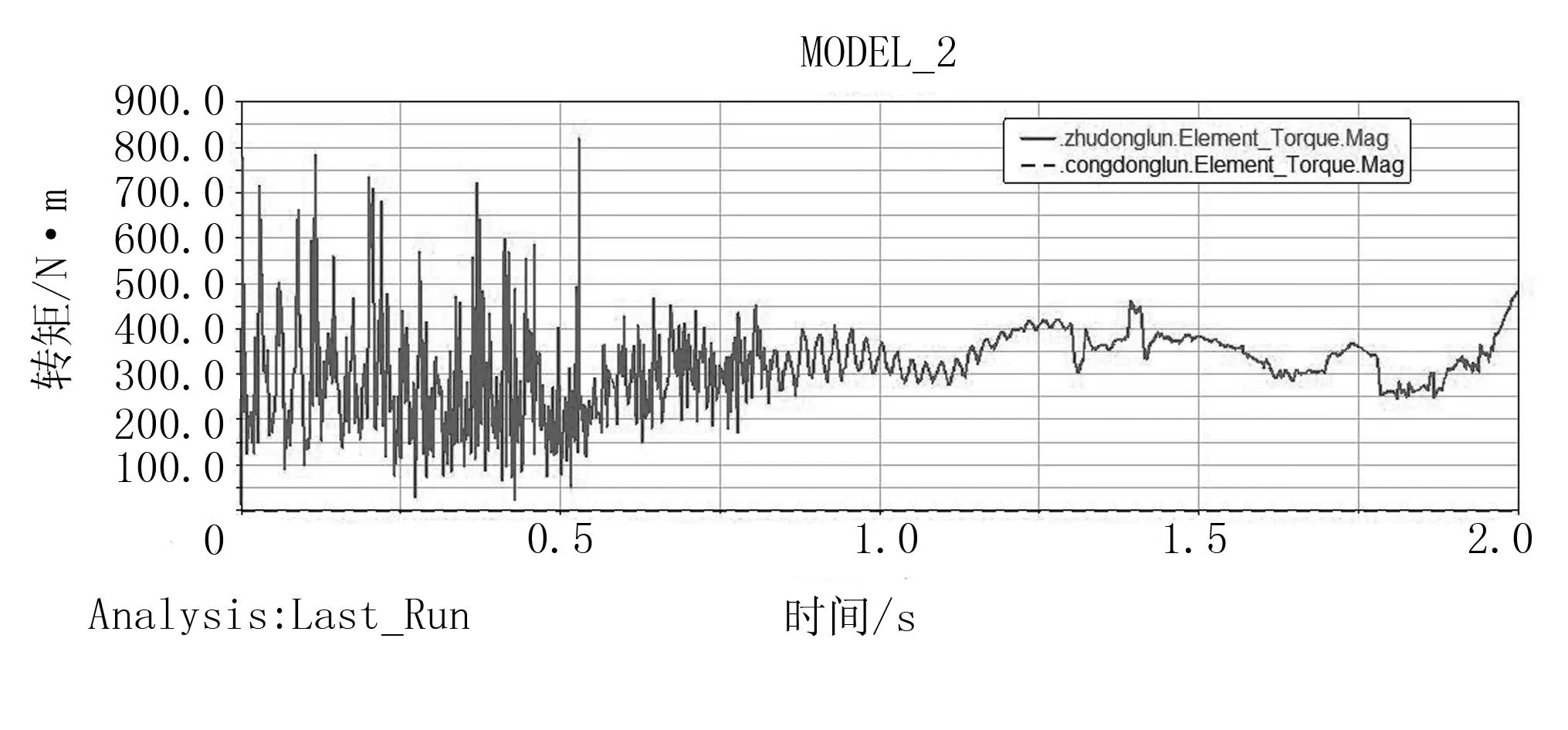
图10 主、从动链轮的转矩曲线
由于主动轮为驱动轮,则主动轮角速度稳定为180deg/s,角加速度约为0.7(°)/s2,主动轮最大转矩为812N·m,稳定后平均转矩为300N·m。从动轮受到启动冲击的影响,从动轮角速度产生波动,最后趋于稳定,在主动轮角速度180(°)/s上下小幅度波动。从动轮角速度在启动0.5s左右时波动最大,因此从动轮角加速度在该处约为1.25×106(°)/s2,随后趋于稳定,逐渐趋于0。从动轮转矩远远小于主动轮,因主动轮转矩较大,从动轮相对主动轮的运动平稳,且与输送链之间存在一定的打滑现象,缓解了输送链的张紧边载荷的差异,提高了输送装置的使用寿命。
设定X、Y、mag分别为仿真因素的水平分量、垂直分量和合量,任意输送链片质心速度和加速度曲线如图11、图12所示。
由图11、图12可看出:驱动拨爪链条运动成周期性变化,在运动初期链条速度和加速度波动较大;0.47s前链条速度、加速度剧烈波动、不稳定,此时,链片与输送链主动轮啮合;0.53 s后链条运动趋于稳定。输送链条与输送链主动轮啮合时存在多边形效应,运动基本符合正余弦曲线规律;输送速度约为1m/s,符合输送要求。
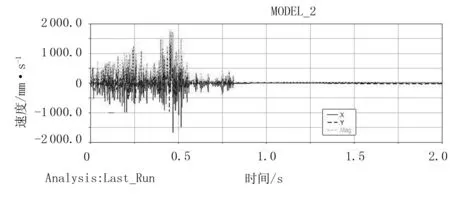
图11 驱动拨爪链条速度曲线
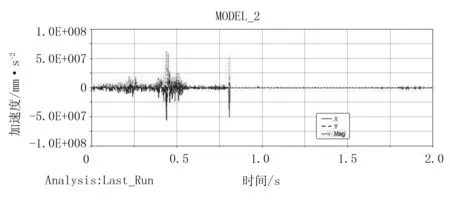
图12 驱动拨爪链条加速度曲线
4结论
1)分析了驱动拨爪链运动多边形效应,获得了输送链的速度、加速度与输送链轮参数之间的关系。链轮的齿数越多,驱动拨爪链条的速度不均匀系数越小,输送装置运行越平稳,确定齿数为10。
2)分析了输送链的运动过程及受力,分析两链轮的角速度、角加速度、转矩的变化规律。在启动0.5 s内,链条与主动链轮的接触力、角速度波动震荡均较大,从动链轮相对主动链轮运动平稳。
3) 分析了驱动拨爪链条的速度、加速度,确定输送速度约为1m/s。
参考文献:
[1]李成松,高振江,坎杂,等.酿酒葡萄果-蒂振动分离试验[J].农业工程学报,2015,31(9):39-44.
[2]陈习刚.葡萄、葡萄酒的起源及传入新疆的时代与路线[J].古今农业,2009(1):51-61.
[3]刘俊.张家口市葡萄产业发展建议[J].河北林业科技,2013(2):44-54.
[4]赵中华.新疆葡萄生产机械应用现状及发展方向[J].农业技术与装备,2008(4):33-34.
[5]冯玉磊,坎杂,李成松,等.基于振动原理的酿酒葡萄采摘试验装置的设计[J].江苏农业科学,2013,41(11):404-406.
[6]蒲胜海,张计峰,丁峰,等.新疆葡萄产业发展现状及研究动态[J].北方园艺,2013(3):200-203.
[7]李成松,高振江,坎杂,等.双支撑酿酒葡萄果实振动分离装置作业机理[J].农业工程学报,2015,31(4):26-32.
[8]李成松,冯玉磊,坎杂,等.国外酿酒葡萄收获机振动采摘部件结构及应用现状[J].江苏农业科学,2014,42(3):335-337.
[9]袁盼盼,坎杂,王丽红,等.酿酒葡萄收获机输送装置的设计[J].江苏农业科学,2014,42(10):386-388.
[10]吴清分.NEW HOLLAND 公司 VN 2080 型高地隙葡萄收获机[J].农业工程,2013(1):105-107.
[11]郑志峰.链传动[M].北京:机械工业出版社,1984.
[12]濮良贵.机械设计[M].北京:高等教育出版社,2006.
[13]倪健健,李文斌.基于ADAMS的链传动机构的仿真分析[J].中国农机化,2015,36(1):242-245.
[14]荣长发,张明路.滚子链传动的振动特性分析 [J]. 机械传动, 2006,30(4):63-65.
[15]蒲明辉,宁际恒.基于MSC.ADAMS的链传动建模与仿真研究[J].广西大学学报:自然科学版, 2007, 32 (1):60-64.
Movement Analysis and Simulation of Wine Grape Harvester Conveyer
Yuan Panpan1, Zhang Xuejun1, Kan Za2, Li Chengsong2, Jin Wei1, Yang Lantao2

Abstract:Wine grape harvester conveyer consist of guide rail, collect system, transmission system and accessories. The movement of drive dial claw chain polygon effect was analyzed, expression of drive dial claw chain velocity and velocity distribution uneven coefficient were derived.The movement process and stress of the conveying chains, change rules of angular speed, angular acceleration and torque of the two sprockets were achieved using ADAMS simulation software. And driven sprocket was smooth movement relative to drive sprocket.
Key words:harvester; wine grape; convey; ADAMS
中图分类号:S225.93
文献标识码:A
文章编号:1003-188X(2016)10-0051-05
作者简介:袁盼盼(1989-),女,河南周口人,助教,硕士,(E-mail)ypp_xnd@163.com。通讯作者:张学军(1966-),男,四川渠县人,教授,硕士生导师,博士,(E-mail)zhxjau@sina.com。
基金项目:新疆生产建设兵团工业科技攻关计划项目(2013BA009)
收稿日期:2015-10-29
猜你喜欢
农机使用与维修(2022年2期)2022-02-21
中国农村科技(2021年12期)2021-12-28
农机使用与维修(2021年7期)2021-11-29
农机使用与维修(2021年12期)2021-11-27
江苏农机化(2020年5期)2020-10-26
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
河北农机(2020年2期)2020-01-08
农民致富之友(2019年33期)2019-12-20
河北农机(2017年11期)2017-11-24
新农业(2016年13期)2016-08-16
