
应用MS1000扫描声纳的通航船舶吃水测量系统
2016-03-23 16:01纪立军
珠江水运 2016年3期
纪立军
摘 要:本文阐述的系统可以为航道维护和管理部门快速提供通航船舶的实际吃水深度,可以有效遏制“超吃水”,维护良好的通航秩序。系统具有测量精度高、控制灵活、实时性好、快速等诸多优点,可广泛用于江河湖海各类船舶的吃水监测,对航道内船舶吃水深度严格监测和控制具有十分重要的意义。
关键词:通航船舶 吃水测量 扫描声纳 MS1000
1.引言
我国通航形势日益严峻,但是在利益的驱使下,“超吃水”冒险航行的情况屡禁不止,给通航安全和航道畅通造成巨大的威胁。船舶超吃水搁浅后,很容易在航道内形成淤积沙堆甚至沙埂,对航道的破坏十分严重,给船舶航行的安全也带来很大的隐患。特别是在进入枯水季节后,船舶一旦搁浅,将给船舶和航道部门双方都造成严重的后果和损失。
本文推荐通航船舶吃水声学测量系统,它是采用机械式扫描声纳作为吃水监测的核心声学设备,扫描声纳的工作频率为675kHz,发射波束角为1.7°的圆锥形波束,声纳换能器可以旋转进行剖面测量,并快速获取水底和船体的剖面图像,使用软件就可以测量当前的水深和船舶的吃水状态。软件可以对剖面测量的图像进行测量,就可以获得船舶的吃水深度dr。系统可以布设在航段上,对过往的船舶进行监测,也可以安装在巡逻艇上,实行机动式的监测。下面就对这一系统进行详细的阐述。
2.系统工作原理及构成
2. 1系统构成
通航船舶吃水声学测量系统包括PC(含MS1000软件)、甲板单元、声纳探头和水下电缆。
MS1000软件符合ISO标准,品质可靠。任何一台标准PC只要安装了MS1000软件,就可以实现采集和处理声纳图像数据,无需配置复杂的电路板或硬件作为声纳处理器。
MS1000扫描声纳的探头配备两个换能器,长方形换能器用于扫描成像,圆形换能用于剖面测量。它是一种主动声纳,利用发射基阵向水中发射声纳脉冲。
2.2系统工作原理
扫描声纳是一种可以实现水下非可视高精度成像的重要技术手段,声纳扫描精度可以达到毫米级别。
本文通过连续发射调频波测距法来测距,当发射信号遇到目标时,产生回波;利用发射频率、回波频率、声速、调频周期等,即可扫描出船舶吃水部分、水面及水底图像,从而间接获得船舶的吃水。
而扫描声纳连续调频波测距的基本原理如下:
线性调频信号的初始频率为,扫频带宽为B,扫频周期为T,信号来回与目标与接收换能器的所需时间为。
线性调频发射信号的公式为
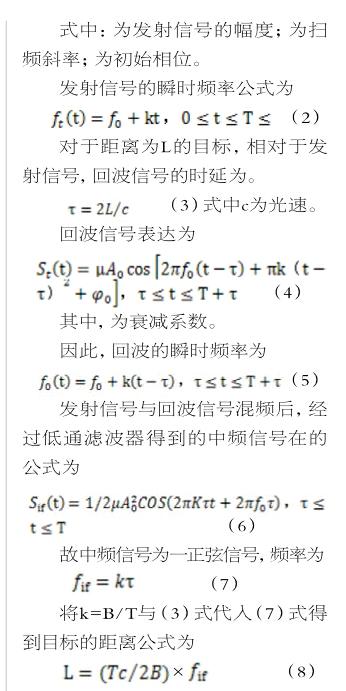
按照如上的原理公式,其就能将通过目标产生的脉冲回波对船舶吃水部分进行测距、定位及识别,从而形成有精确数据的船舶吃水部分、水面及水底的声纳图像。
MS1000扫描声纳的圆形换能器的成像扇形波束可达0.9°× 30°,并可发射波束角为1.7°的剖面圆锥形波束,声纳换能器在步进电动机的带动下,可以进行连续360°角度的旋转,其成像距离可达0.5—100m,距离精度可达到19mm,当回波信号被采集处理后,可以得到水体的剖面图像(如图4所示)。剖面图像可以反映水面、水底和船体的位置信息,使用 MS1000 软件可以对图像进行测量,非常容易的获取当前的水深 D和船舶的吃水状态 dr,船体距离海底的高度也可以测量出来。声纳对通航船只进行扫描,软件可以显示水底、船体、水面和河岸的图像,通过软件的测量功能,就可以测量出当前的吃水深度。测量过程可以在 30 秒内完成。
3.实例应用
本文结合“某海事局通航船舶吃水测量”的实例,来分析和对比MS1000扫描声纳的通航船舶测量系统的可行性与可靠性。
3. 1项目概况
某长江中下游海事局为了应对日益增加的航运船舶的数量和密度,防止因航运船舶的“超吃水”而造成的船舶事故的发生,故希望利用声纳测量系统实时监测通航船舶的吃水量,减少船舶“超吃水”现象,保证长江航道的安全。
3.2吃水测量
系统安装调试完成后,即对通航的船舶进行了吃水测量,当船头通过时,剖面图像清晰可辨,各种数据显示正常可靠,水深8.415m,船舶吃水2.305m;但当船尾通过时,剖面图像上干扰噪声很大,完全分辨不出水底与船底。经分析后,认为船尾通过时,扫描声纳脉冲受到螺旋浆的影响,船舶螺旋浆的转动导致噪声信号强,干扰了正常的声纳扫描。尽管船尾扫描信号较差,但依然满足实际测量的需要,扫描工作只需30s,而以一艘50m长、2节船速(通过检查口时船速一般较慢)的船为例,通过扫描探头则需要50s,完全符合实际的要求。
3.3扫测结果与分析
对通航船舶的吃水测量,主要难于把握的就是监测仪器与所测通航船舶的相对速度。因在实际监测时,通航船舶通过的速度受人为影响较大,所以我们就系统测量的船舶吃水数据与船舶通的速度之间的联系进行分析。
由表1所示,随着测量船舶的速度的增加,测量的船舶吃水深度也随之变大,测量的误差逐渐增大,最小的吃水深度误差为8cm,最大的吃水深度误差为25.2cm,这一方法可行,但是其测量误差会随着监测船舶的航速增加而增加。
通过分析可知,因为声波的传播频率和传播距离存在一定的矛盾,当保证监测距离时,就得将声波的发射频率适当减小,同时增加声波的发射功率,而在减小发射频率和发射功率的同时,却导致如声波散射等情况,测量船舶的船速越大,声波经过船舶底部边缘时散射情况越严重,船舶吃水深度的测量误差就越大。
同时当船舶航速达到一定的数值时,导致扫描声纳对水底及船舶吃水部分扫测的不完整,即扫描声纳还未完成整个扫描过程,被监测船舶已驶离监测区域。
4.结语
应用MS1000扫描声纳的通航船舶吃水测量系统是基于声学原理的吃水深度测量系统,利用声波的反射生成水面、船舶吃水部分及水底的剖面图像,通过解算,得出船舶的吃水深度及水底深度。并经过分析验算证明该系统的测量误差满足测量要求,能够实现对通航船舶吃水深度的监测。
系统组成相对简单,所需组件不复杂,且扫描声纳换能器小型、轻便,便于安装和应用。此系统既能固定安装,也能安装在流动监测船上。在实际的应用中,该系统运行稳定,监测成果生成快速精确,在未来航道的安全监控方面有着广泛的应用。
参考文献:
[1]付传宝,叶家玮,刘愉强.扫描声纳探测桥墩水下结构的方法与实例分析[J].西部交通科技,2007年1期.
[2]张晓永,陈峰,李晓庆.线性调频连续波激光雷达探测原理分析[J].现代雷达,2012年7期.
[3]朱四印.船舶动态吃水实时检测与数据处理关键技术的研究[D].硕士毕业论文,2011年.
