
基于Envirtech海啸预警浮标的改进研究
2016-03-23 23:30刘同木林冠英黄虓寰
珠江水运 2016年3期
刘同木+林冠英+黄虓寰
摘 要:2010年我国从意大利Envirtech公司进口一套海啸预警浮标,并在南海海域成功布放,这是我国首次开展海啸预警浮标业务。浮标的布放和数据资料接收过程中,发现该海啸浮标标体长度太长,对布放作业船只要求太高,布放操作相当困难,数据接收率也不高。针对该海啸浮标的运行情况,本文研究了意大利海啸浮标的工作原理、结构组成及布放方法,并提出了改进措施。对原海啸浮标进行了升级改造,通过海上布放验证发现,改造后的海啸浮标布放操作明显方便,数据接收率由80%提高到100%,该研究为我国自主开展海啸浮标设计研发提供有力参考。
关键词:海啸 浮标 海啸预警 海啸监测
海啸是由海底地震、海底火山爆发、海岸和海底山体滑坡、小行星和彗星溅落大洋及海底核爆炸等产生的具有超大波长和周期的大洋行波。海啸波波长通常达到100千米或以上,而周期则从10分钟至1小时。在深海大洋中,海啸波以每小时800千米以上的速度传播,但波高却只有几十厘米或更小。当海啸波移近岸边浅水区时,波速会减慢,波高陡增,可形成十数米或更高的水墙。可见,海啸具有超强的破坏力,对沿海城市人们的生命财产安全造成极大威胁。目前海啸预警监测的主要方法有:压力式海啸监测浮标、GPS海啸监测浮标、卫星遥感、水下地震台等。日本和美国都拥有由海底压力记录仪、浮标、卫星、地面接收站等组成的全天候海啸动态监视和预警系统。在我国,东海、南海特别是台湾岛附近海域具备产生海啸的条件。然而,我国尚未能自主研制海啸预警浮标。2011年3月11日,日本本州岛东部海域发生里氏9.0级强烈地震,随后引发太平洋越洋海啸。日本大海啸再次唤起人们对海啸预警浮标的迫切需求。2010年我国从意大利Envirtech公司进口一套海啸预警浮标,并成功布放。业务化运行过程中,发现该浮标存在布放回收困难,接收率不高的问题。针对该海啸浮标,做了深入研究并提出了具体改进措施。
1.海啸浮标预报原理
虽然海啸是由多种因素引起的,但最常见的因素是海底下面的地震活动。在正常的大多数情况下,海底并不像海面那样波涛汹涌,而是非常的平静。如果海底有地震、火山爆发等异常情况发生,那么海底将不再平静,海底的水位会突然变化,就有可能引发海啸。海啸浮标预警系统正是通过对比相邻两次海底水位差来判断是否会发生海啸。当相邻两次海底水位差超过某一阀值时,系统认为海啸已经发生。该意大利海啸浮标预警系统将这一阀值设定为30mm,而美国SAIC海啸浮标将此阀值设定为50mm。
该意大利海啸浮标预警系统有三种工作模式:正常模式、修护模式和警报模式。修护模式是用于浮标布放前调试通讯系统和设置浮标各种参数。正常模式是没有监测到海啸时的工作状态。海底水位传感器每15秒钟采集一个压力数据,每15分钟求取一个压力平均值,每个小时或几个小时将这些压力平均值数据通过海事卫星传送给陆地海啸预警中心。当某时刻压力值突然发生变化,超过30mm的阀值时,该系统立刻发出海啸预警信号,立刻自动切换到警报模式。在海啸发生后,预警系统每5分钟将采集的瞬时压力数据传送陆地预警中心。30分钟后,自动切换到每10分钟传送一次数据,直到3小时后海啸预警解除。
2.海啸浮标系统组成
该意大利海啸预警系统主要由两部分组成:一个锚式海底压力采集单元即水下单元和一个同步停泊在水面的浮标。水下单元实时采集海底精确的水压力数据,然后通过声通讯传感器把数据从水下平台传输到水面浮标系统,再通过海事卫星C实时将数据传送至陆地海啸预警中心。该海啸预警系统就是通过精确测量海底水压力来监测是否有海啸发生。海啸浮标系统组成示意图如图1所示。
2. 1水面浮标
海啸浮标水面浮标是通过声通讯接收水下单元的监测数据,再通过海事卫星将数据发回接收岸站。水面浮标包括:标体及锚灯、免维护太阳能供电系统、采集系统、声学换能器及卫星通信模块。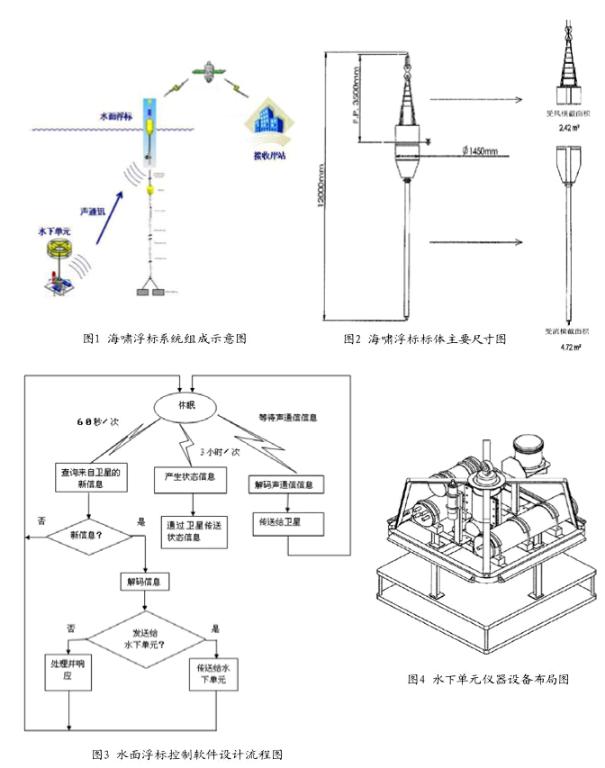
意大利海啸水面浮标的浮力系统为一个直径为1450mm高2350mm的浮体,该浮体外壳为聚乙烯滚塑而成,内部填充高密度聚氨酯泡沫材料。除传感器、电池、电子部件及电缆重量外,水面浮标自重约1670kg。浮标龙骨由浮体中间穿过,龙骨下端留有末端卸扣安装孔,龙骨上端焊接仪器舱及安装支架。浮标顶部装有机械式雷达反射板和免维护式太阳能锚灯。水面浮标内装有3块12v,50w的太阳能板和4块12v,110Ah的可充电电池。所有的金属部件都经过喷砂、电镀及喷涂处理,并安装有锌块牺牲阳极。主要尺寸如图2所示。
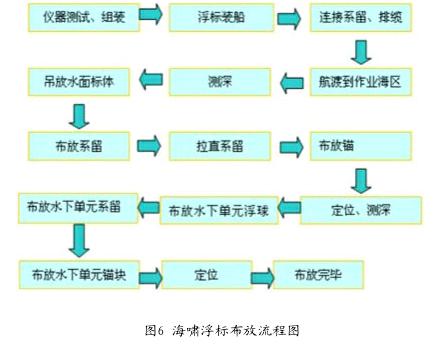
意大利海啸水面浮标的控制软件可以分为三个模块:卫星通讯模块、声通讯模块和诊断模块。卫星通讯模块负责将数据通过卫星传送回接收岸站。声通讯模块处理与水下单元的数据通信。诊断模块采集浮标系统的电压、电流、工作温度等数据。水面浮标控制软件设计流程图如图3。
2.2水下单元
海啸浮标水下单元为一套坐底潜标,包括浮球、系留、仪器支架、高精度压力传感器、声学换能器、声学释放器、电池舱、电子控制部件及配重锚块。水下单元仪器设备布局如图4。
意大利海啸浮标水下单元的支架为一个轻巧而坚固的金属框架。该金属框架的材料为AISI316L型号的海洋级不锈钢。底板长宽均为90cm,配重锚块以上高度为67.5cm。水下单元重158kg。配重锚块高100.5cm,重220kg。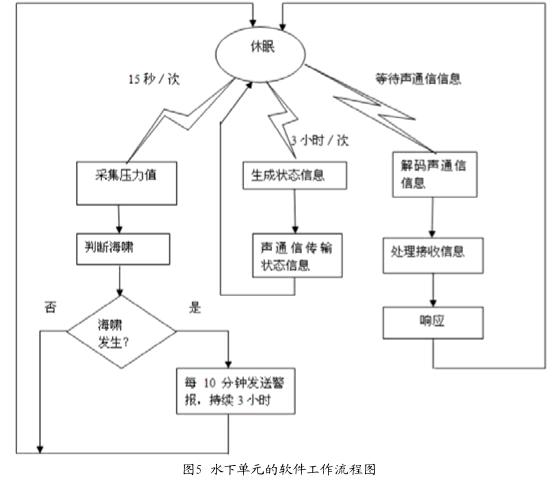
水下单元搭载的高精度水压传感器为Paroscientific8000型,其精确的石英晶体谐振器频率的振荡与压力引起的应力成比例。压力的计算是通过石英晶体温度信号进行补偿,这样实现在一定宽广的温度范围内达到水位传感器高精度目的。水压传感器包括防水外罩与完整的防震动保护浮标装置。
意大利海啸浮标水下单元的控制软件设计可以分为有三个模块:水压采样模块、通讯模块及诊断模块。水压采样模块负责实时采集海底水压数据,判断是否有海啸波产生。通讯模块负责通过声学换能器与水面浮标通讯,将采集水压数据传送到水面浮标。诊断模块主要负责采集电路状态、电池电压等诊断数据。水下单元的软件工作流程图如图5。
3.布放方法
海啸浮标的布放方法采用传统的“先放浮标后放锚”的作业流程。首先布放水面浮标,然后布放水下单元潜标。具体步骤如下(如图6):
(1)仪器设备在码头进行组装、测试,在工作状态正常的情况下,用起重机和绞盘将浮标转到作业船只上,确认工作状态正常;
(2)将系留绳缆在甲板上按照“8”字形状排列整齐,并做好连接。
(3)船只到达布放站位,用DGPS定位仪测定浮标的布放点后测量水深。
(4)将船开到布放点的下风,离布放点约2/3锚系长度处,调整船向使船首向迎风方向,停船开始作业,吊放水面浮标到海里;
(5)依次布放系留,作业船只以小于2节速度缓慢前进,布放过程中系留始终保持一定张力;
(6)重新定位,船只徐徐拖动浮标到布放点;
(7)确定系留不打绞的情况下布放锚;
(8)利用声学释放器的测距功能,进行三点测距定位,并记录水面浮标布放时间、位置和水深等相关参数;
(9)布放水下单元浮球及系留
(10)布放水下单元锚块。
(11)布放完成。
4.改进措施
在意大利海啸浮标业务化运行过程中,发现存在布放困难、数据接收率不高等不足之处。根据实际作业经验,提出以下改进措施(如图7):
(1)缩短浮标体龙骨长度。在不影响海啸浮标系统正常工作情况下,为了减小海啸浮标布放、回收难度,根据作业船现有甲板设备(如A型架高度),可以把龙骨切掉3~4m。将切掉的配重,采取在龙骨中灌注铅的方式补回。
(2)水面“X”特殊作业标识,增大了布放与回收作业难度,此标识宜在浅海或航道使用,对深海区使用意义不大,可以割掉不用。
(3)浮力系统高度太高,不利于登标作业。可以增大浮体直径,降低高度,保持总浮力不变。
(4)海事卫星终端天线杆结构不牢固,底座强度小,需要重新设计加固。
(5)意大利海啸浮标没有设起吊点,需要加装起吊固定座。
(6)针对海啸浮标数据接收率低的问题,可以在龙骨底部增加一套声学换能器,采取双系统接收通讯,提高数据接受率。
(7)将水下单元声学释放器改为可靠性更高的IXSEA型。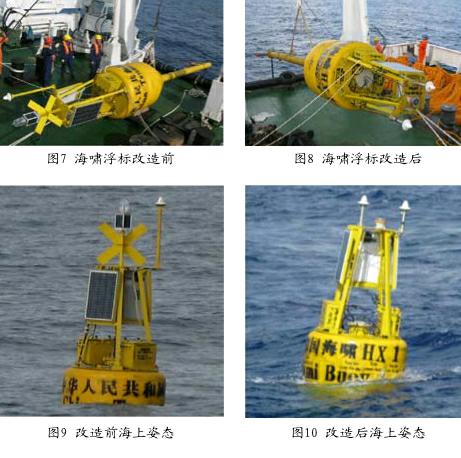
5.海上验证
根据上述改进措施,国家海洋局南海工程勘察中心对意大利海啸浮标进行了升级改造(改造前后照片见图7、图8),并于2012年4月22日至4月29日,使用中国海监83船,在南海中部(北纬15°31′,东经115°49′,水深4240米)成功布放了改造后的海啸浮标,改造前后海啸浮标海上姿态如图9、图10所示。改造后的海啸浮标,布放操作明显方便,数据接收率从80%提高到100%。
参考文献:
[1]叶琳,于福江,吴玮.我国海啸灾害及预警现状与建议[J].海洋预报,2005,22(增刊):147-156.
[2]闫明,张国友,佟凯,俞慕耕.浅谈海啸[J].海洋预报,2005,22(2):47-52.
[3]程世来,张小红.基于PPP技术的GPS浮标海啸模拟研究[J].武汉大学学报(信息科学版),2007,32(9):764-766.
[4]刘佳佳.实时海啸监测和预报技术[J].海洋技术,2007,26(1):20-25.
[5]郭彩玲,王晓峰.中国东部海域发生海啸的可能性分析[J].自然灾害学报,2007,16(1):7-11.
[6]陈顒,陈棋福,张尉.中国的海啸灾害[J].自然灾害学报,2007,16(2):1-6.
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09
家教世界·创新阅读(2023年2期)2023-06-07
家教世界(2023年7期)2023-03-22
家教世界(2023年4期)2023-03-04
垂钓(2022年3期)2022-05-14
垂钓(2019年2期)2019-09-10
小星星·阅读100分(高年级)(2017年5期)2017-06-10
小星星·阅读100分(高年级)(2017年4期)2017-04-24
Nuclear Science and Techniques(2014年1期)2014-04-24
