
基于某模型自由飞试验的测控与信息传输系统设计
2016-03-17 01:55安玉娇刘朝君
计算机测量与控制 2016年2期
安玉娇,刘朝君,井 立
(中国飞行试验研究院 飞机所,西安 710089)
基于某模型自由飞试验的测控与信息传输系统设计
安玉娇,刘朝君,井立
(中国飞行试验研究院 飞机所,西安710089)
摘要:针对模型自由飞试验的技术要求,设计了某模型自由飞试验使用的测控与信息传输系统,针对系统设计要点突破了多项关键问题,给出了系统关键点的设计方法和具体实现过程,并结合实例和仿真给出了相应的结果,通过地面试验对整个测控与信息传输系统的性能进行测试,包括地面及机载收发信机的接收灵敏度测试、系统时延测试等,试验结果表明,收发信机接收灵敏度及链路延时等指标都能满足模型自由飞试验的要求;对同类型系统设计有重要参考价值。
关键词:测控系统;信息传输系统;模型自由飞
0引言
模型自由飞试验是当代航空技术必不可少的研究手段之一。在型号飞行试验中,一些极限飞行状态的试验,如失速/尾旋、过失速机动等,由于试验的风险太大、代价太高,为了降低风险,避免盲目性,用模型自由飞试验进行预先探索是一种有效的研究手段[1]。在传统的模型自由飞试验中,地面操纵飞行员只能依靠视距操纵模型验证机(简称模型)完成试飞科目,试验范围有限,天气等外在因素对试验的影响较大,对于模型飞行姿态、速度和高度等关键信息的获取只能依赖于操纵飞行员的经验,所以这种试验方法效率较低,试验失败率较大,且对于操纵飞行员的心理素质及能力要求极高,如果速度和高度判断不准,容易导致模型回收失败,造成严重经济损失。在模型自由飞试验中利用测控与信息传输系统可以实现超视距操纵模型进行试验的目的。
测控与信息传输系统是地面任务站与模型之间联系的唯一通道,承担着对模型飞行控制指令的抗干扰传输,并将采集到的设备状态、关键试验数据等信息实时传回到地面任务站各单元的任务。目前,对测控与信息传输技术的应用与介绍大多是针对无人机系统或多无人机系统而言的[2-3],与无人机飞行和执行任务的特点都密切相关。本文从模型自由飞试验任务的特点出发,详细讨论了基于某模型自由飞试验的测控与信息传输系统设计全过程,并通过地面试验结果分析了测控与信息传输系统的重要性能。
1测控与信息传输系统设计要点分析
模型自由飞试验可降低全尺寸飞机的试飞风险,尤其在大迎角特性飞行试验中,利用模型自由飞试验结果来分析全尺寸飞机的大迎角飞行特性,可以对全尺寸飞机的飞行试验、飞行动作设计提供依据,避免其盲目性。根据模型自由飞试验的特点,对测控与信息传输系统设计要点进行了如下分析:
1)模型进入失速、尾旋飞行状态时,其机动性很强,姿态变化急剧,例如其方位姿态变化有时可达200°/s,为保证信号传输的可靠性,必须考虑由于模型姿态剧烈变化可能引起的机载天线遮挡问题。
2)模型在空中进行失速、尾旋的飞行试验时间持续较短,对于无动力模型自由飞试验而言,从模型经载机投放到最终开伞落地的时间大约为20 s,这就要求模型验证系统数据链路传输具有较高的实时性,以保证能够及时地获取飞行试验数据。
3)试验过程中,模型的下降高度变化迅速,法向过载比较大,要求地面跟踪设备在俯仰方向上要具备较高的跟踪性能。在测控与信息传输系统设计中应保证系统具备较精准的测距和测角功能。
4)一般情况下,模型都是其对应机型的缩比形式,所以其体积相对较小,其所能容纳机载设备的空间很有限,这对机载设备的小型化设计技术提出了较高的要求。
5)对于无动力模型自由飞而言,回收方式一般为伞降回收,如果开伞不利或伞降高度不够的话,可能会使模型在触地时承受较大的冲击;对于带动力模型自由飞而言,其发动机一般具有较大的振动,这就要求机载设备具有较高的抗冲击能力和抗振特性。
模型测控与信息传输系统的研制必须充分考虑模型自由飞试验的特点,在机载天线组合,链路传输实时性、准确性和可靠性,跟踪模型试验动作快速性,机载设备抗振及抗冲击能力等方面都提出了比较高的要求。
2测控与信息传输系统设计
2.1系统功能描述
测控与信息传输系统主要由机载测控设备和地面测控设备两大部分组成。机载测控设备通过遥测链路将采集到的图像信息和飞行参数传送至地面站,然后地面测控设备对遥测链路数据进行解调和解码并送至地面站的显控系统进行显示,操纵飞行员根据飞行状态和飞行参数等信息,使用飞行操纵系统来控制模型飞行。地面飞行控制计算机根据操纵信息,解算出控制指令,通过地面测控设备中的遥控发射系统上传给模型,机载测控设备接收到指令后通过飞行控制系统生成控制信号,驱动伺服机构来控制模型的飞行。图1和图2 分别为机载和地面测控设备组成原理图。
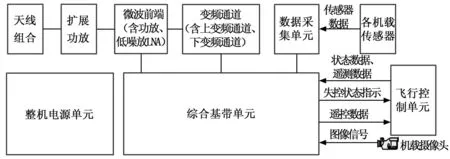
图1 机载测控设备组成原理图
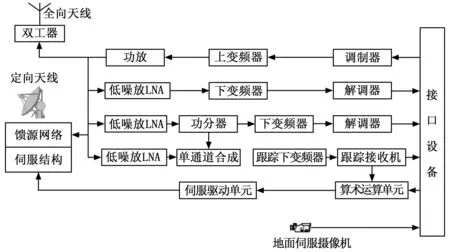
图2 地面测控设备组成原理图
2.2机载系统天线设计
传统的线极化天线在飞机机动性较大或者受到机体遮挡等因素影响时,自身设计不足或受机体的影响,会形成“凹坑”,即某些俯仰角度上天线的增益较低。
当飞机的机动性较小时,通过合理设计天线的方向图或者在飞机机体上选择天线的合适位置,能够避免“凹坑”在使用过程中出现。然而在使用模型进行飞行试验时,其机动性一般都很高,这就使得“凹坑”可能会在某个俯仰角度上出现,当模型一直以该姿态飞行时,就会造成机载与地面之间信号产生中断,影响飞行安全。
为了解决该问题,在测控与信息传输系统中,机载采用双天线组合工作,即在模型合适位置上安装两个机载天线,两个天线的方向图能够在每个方向上都能够达到设计的天线增益,使得飞机在高机动状态下以保持接收或者发射信号稳定,保证飞行试验的安全。
2.3遥控传输编码方式确定和实现
遥控采用DS(直接序列扩频)+QPSK(四相相移键控)调制体制。直接序列扩频具有很好的抗多径和抗有源干扰的能力,QPSK调制是一种具有较高频带利用率和良好的抗噪声性能的调制方式。
对于遥控数据,若采用交织编码加卷积编码的方式,会加大遥控指令的传输时延。本系统采用了(4,3,7)卷积编码方式,按照数据传输速率为50 kbps计算,可获得约3.5 dB的编码增益,且在一定程度上能满足系统时延的要求。
在扩频码率的选择上,考虑到系统带宽和抗干扰能力,选用的扩频码率为6.144 Mchip/s,其扩频增益大致为20 dB。图3为遥控编码和调制体制实现框图。
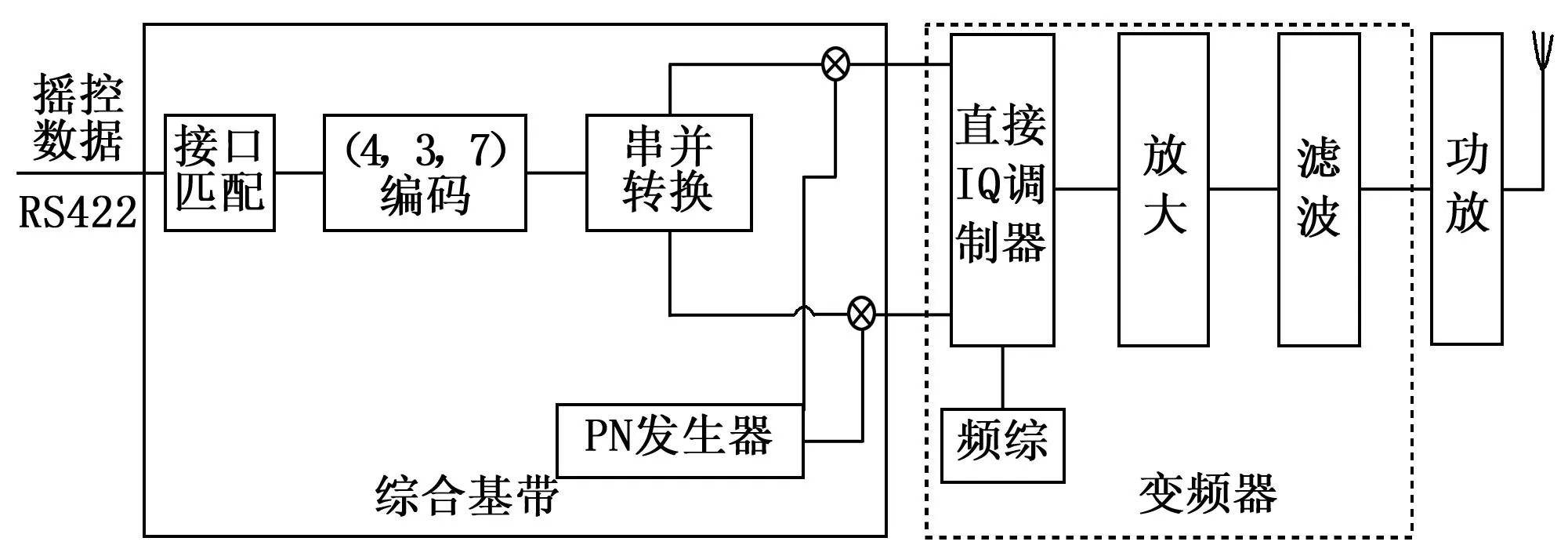
图3 加入编码和采用QPSK的遥控链路调制实现框图
2.4遥测和图像传输编码方式确定和实现
遥测和图像采用同一链路进行传输,为了简化系统设计并达到性能优化的目的,采用UQPSK调制域复合传输体制,即不平衡QPSK调制方式,实质是同频正交的BPSK(二相相移键控)调制信号的复合。其中图像支路分配较高的功率,遥测信号相对于图像而言码率很低,只需要分配较小的功率。进行BPSK调制之前,首先对遥测信号进行直接序列扩频,达到图像信号的带宽,然后进行复合传输。
对于图像数据,可采用RS(255,223)+ (2,1,7)卷积编码方式,可获得约7 dB的编码增益。
对于遥测数据,为保证数据传输的低延时性,也没有采用交织编码加卷积编码的方式,而同样采用(4,3,7)卷积编码方式,按照遥测数据传输速率为100 kbps计算,可获得约3.5 dB的编码增益。遥测的扩频码率与遥控相同,这样扩频增益大致为15 dB。加入编码和采用UQPSK的遥测和图像链路调制实现如图4所示。
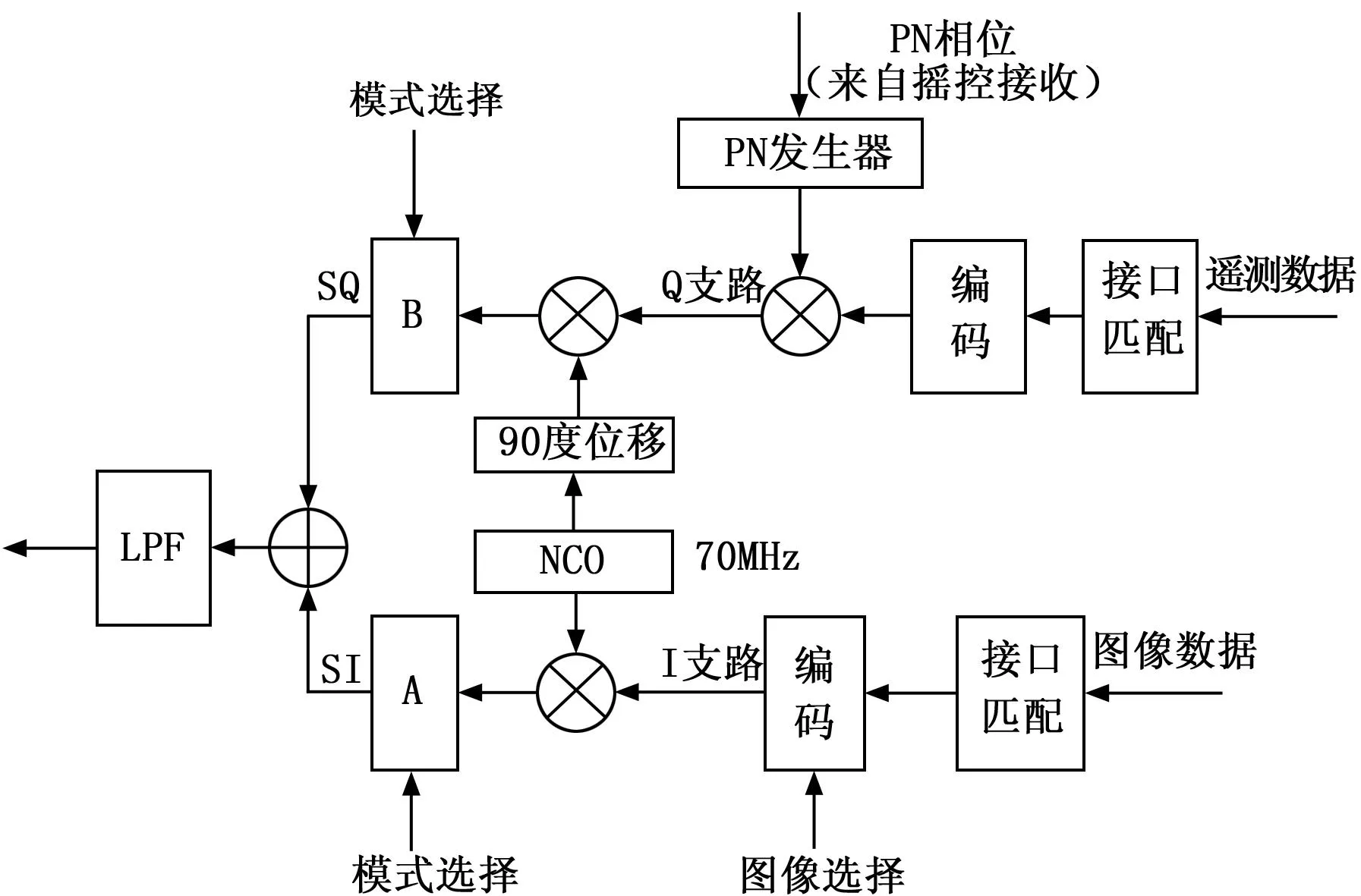

图4加入编码和采用UQPSK的遥测和图像链路调制实现框图
2.5图像压缩处理技术仿真分析
为了更好地对模型进行操纵,操纵飞行员要能够很好地观察到模型的飞行姿态,故对图像压缩质量要求较高。
为了保证较高的视频质量,系统选用目前应用最多的视频图像压缩标准H.264进行视频图像的压缩。H.264在数据处理过程中采用了整数DCT变换,多种模式的帧内、帧间预测,可变长编码等编码性能较高的技术。
图5给出了在输入为单帧大小为720×576的标准测试序列,码率为2 M,帧率为25帧/秒的情况下仿真结果中某一帧的比较图。如图5(a),(b)所示,解码图像主观质量几乎没有差别。
经过仿真比较,从解码图像重建时间和编码质量两方面综合考虑,采用每5帧一个I帧的H.264算法,用2 Mbps传输速率传输分辨率为(720×576)的输入图像,能够很好的满足本系统的技术要求。
2.6系统跟踪定位功能实现
为实现对模型机的跟踪定位,必须实时获得模型的方位和距离信息,因此,系统必须具备对模型机进行测距和测角的功能。
系统采用伪码测距技术实现对模型的测距功能。伪码测距可以直接利用遥控遥测信号的扩频传输体制,不需要额外增加频率和硬件资源,只需要在FPGA平台中嵌入相应的处理算法,具体方法如下:
在PN码捕获跟踪后,利用接收的PN控制遥测数据的PN扩频序列相位。在地面接收设备中,接收到的遥测数据帧和地面发送遥控数据帧的位数差以及其PN序列的相位差也就对应着遥测遥控数据在空中传播的时间延迟,距离就是利用这两个比较值来计算的,如图6,图7所示。
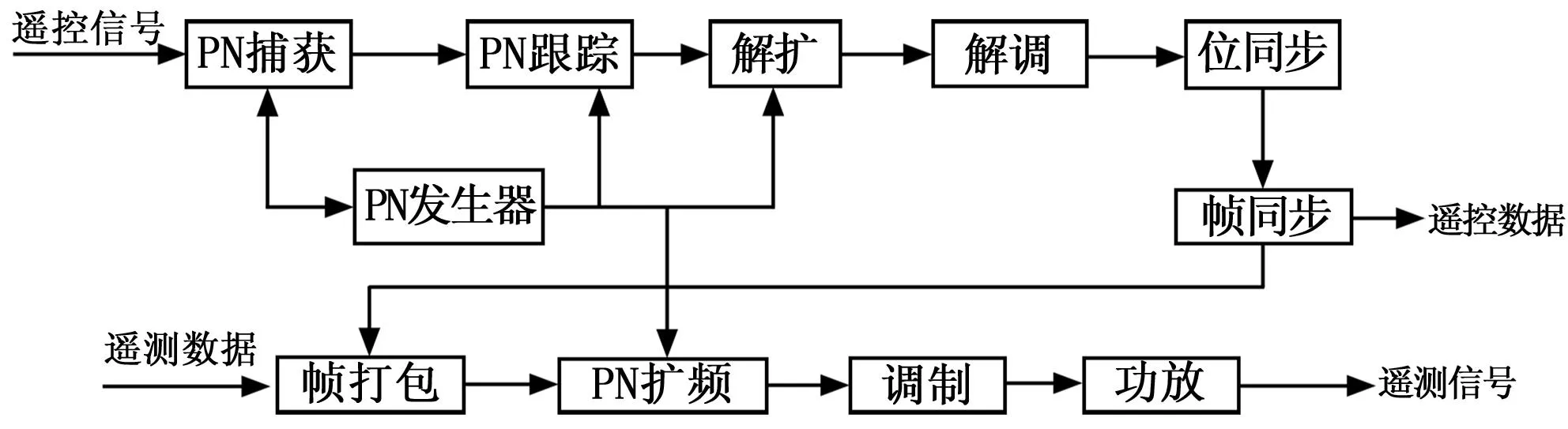
图6 测距系统机载单元
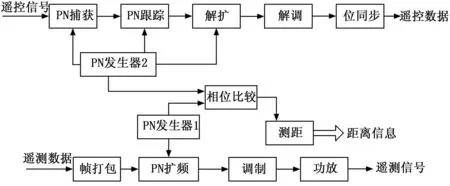
图7 测距系统地面单元
模型在空中进行飞行试验时与地面系统的角度关系始终是变化的,这就需要地面天线具有跟踪能力以保证链路通畅,对模型的“定位”功能要求系统的测角精度较高。本系统采用“单脉冲”跟踪体制,采用数字伺服接收机对两路接收天线的信号进行接收并处理,解调出角度信息。角度信息送给天线控制单元,驱动方位电机使得天线指向模型。此外,还可以与GPS导航定位数据进行融合,以提高定位精度。
3试验结果及分析
3.1试验概述
通过地面试验对整个测控与信息传输系统的性能进行测试,主要包括地面/机载收发信机的接收灵敏度测试、系统时延测试、数据传输速率测试以及测距功能测试等多个方面。由于篇幅有限,下面仅给出地面/机载收发信机的接收灵敏度测试及系统时延的测试方法及结果,并进行相应的分析。
3.2地面/机载收发信机的接收灵敏度测试
接收灵敏度用门限电平值进行表征,检测当链路衰减达到指标要求的数值时,遥控、遥测及图像链路是否能够稳定建立,并且传输误码率是否满足指标要求。接收灵敏度测试原理如图8所示。
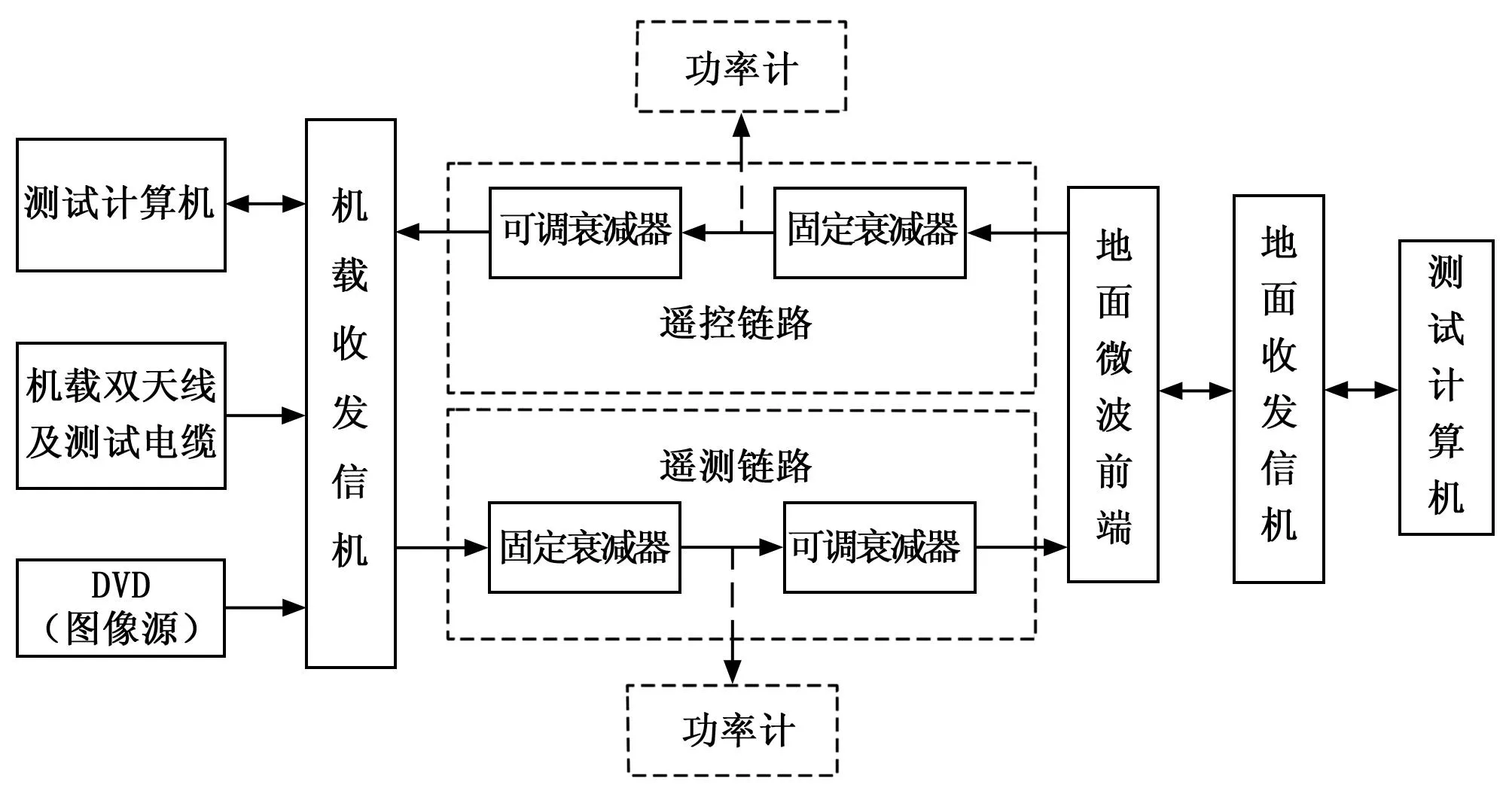
图8 接收灵敏度测试原理
机载收发信机接收灵敏度测试方法:将遥控链路总衰减值调为固定值,设备加电,工作于默认频点,等待链路工作稳定;通过调节可调衰减器的衰减值,使机载收发信机入口处的电平设定在门限电平附件,并且确保遥控链路可稳定工作;按照接口协议用串口调试软件以15 ms为周期发送遥控数据,查看对应的机载输出端有无正确的数据输出,逐渐增大衰减值,并记录最大衰减值;将可调衰减器调至0 dB,利用功率计测试机载设备遥控信号输入端的功率,该功率值减去记录的最大衰减值即为遥控信号的接收灵敏度。遥测及图像信号的接收灵敏度测试方法原理相同,不再赘述。表1为机载收发信机接收灵敏度测试值。序号1~12表示对应1~12个频点。
通过表1中的测试数据可知机载收发信机的接收门限电平值均小于-110 dBM,满足指标要求。
3.3系统实时性测试
时间延迟是指以地面飞行控制计算机发送测试数据的时间点为起始点,数据经过遥控遥测链路传输再次回到地面飞行控制计算机时所经历的时间间隔。测试数据选取1~100,地面飞行控制计算机以自己的时钟为周期发送测试数据,第一次发送

表1 机载收发信机接收灵敏度测试值
从1开始,每个周期发送数值累加1,当数值累加到100并发送完成后,再将数值设回1,循环累加往复发送;机载飞控计算机在遥控数据帧中取出相应的测试数据,并填到遥测数据帧中发送回地面飞行控制计算机。
图9为时间延迟测试数据,实线表示地面飞行控制计算机接收的测试数据,虚线表示地面飞行控制计算机发送的测试数据;横轴表示时间,纵轴表示设定的测试数据1~100。
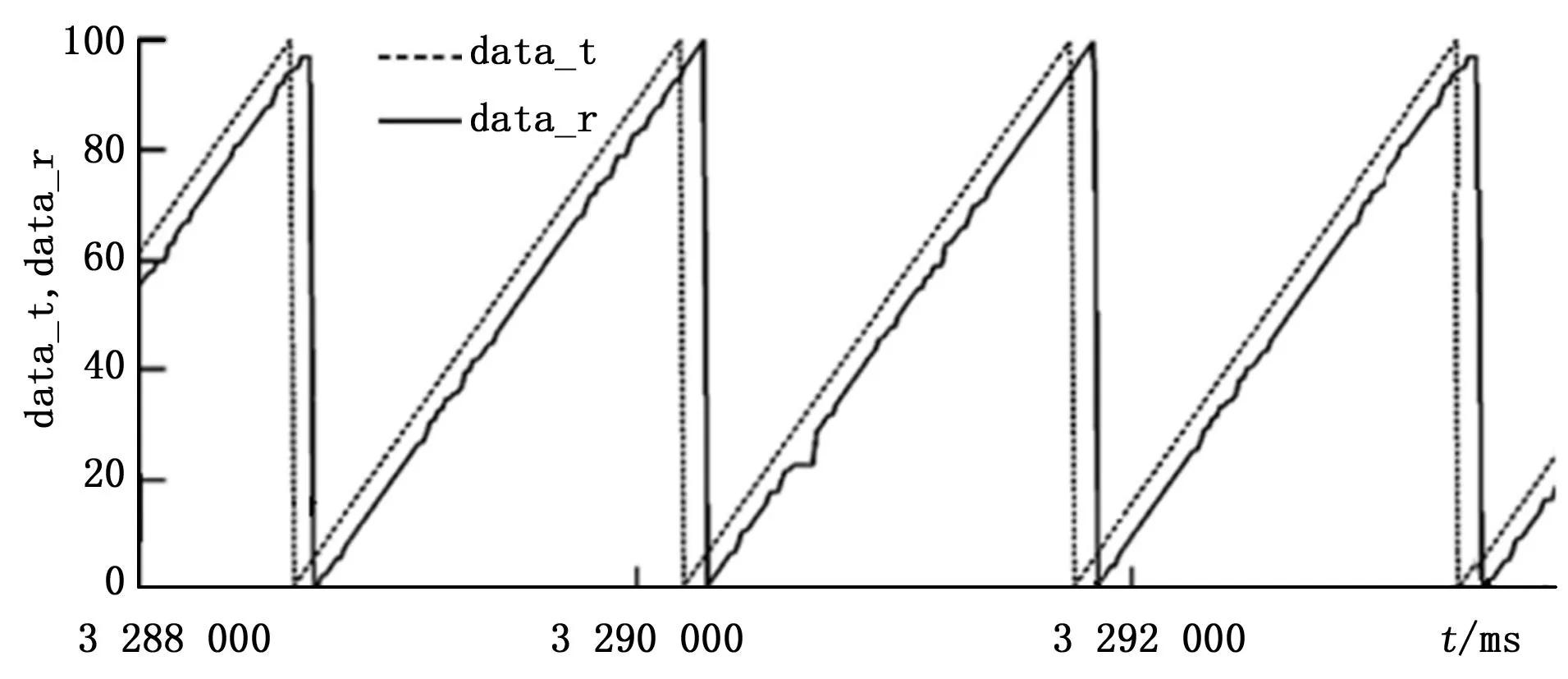
图9 时间延时测试数据
选取图中每个锯齿波顶端为分析点,实线滞后于虚线,从图中可测出时间延迟平均为90 ms,满足模型自由飞试验对于系统的实时性要求。
对于测控信号传输延迟主要由两个部分构成,一部分为采用编译码的传输延迟,一部分为接口处理时的缓存延迟。 对于编译码来说,遥测和遥控采用了(4,3,7)卷积编码,信道延迟约为370个码元。若遥控速率按50 kbps,遥测速率按100 kbps计算,则遥控链路的编译码延迟为7.4 ms,遥测链路的编译码延迟为3.7 ms。接口处理时的缓存延迟一般为3个数据帧的延迟,同样按照上面假设的速率值进行计算,则遥控链路的编译码延迟为30 ms,遥测链路的编译码延迟为15 ms。为此,遥控数据传输延迟总的时间可小于40 ms,遥测数据传输延迟总的时间可小于20 ms。所以传输延迟总时间约为60 ms,但是系统总的延时需要考虑地面及机载计算机的处理时间,还有在其他介质中传播所花费的时间,所以测出时间延迟为90 ms,大于理论计算值是合理的。
4小结
从系统的试验结果来看,系统达到了某模型自由飞验证试验技术要求,并成功完成了某模型自由飞验证试验。系统设计中,多项测控与信息传输关键技术的突破与应用,使得系统的性能得到了很大的提升。
参考文献:
[1] 安玉娇,江辉军,郑浩.带动力模型自由飞试验测试系统设计与实现[J].测控技术,2015,34(6):132-133.
[2] 刘尚民,赵磊. 电传飞机模型自由飞试验飞行控制技术研究[J],飞行力学, 2012,30(1):83-86.
[3] 周详生. 无人机测控与信息传输技术发展综述[J].无线电工程,2008, 38(1):30-33.
[4] 吴潜,雷厉.多无人机测控与信息传输系统的技术与发展[J].电讯技术,2008,48(10):107-111.
[5] 柴霖. 临近空间飞行器测控与信息传输系统频段选择[J].航空学报,2008,29(4):1007-1012.
[6] 方威,王锋,丁团结.无人机数据链性能研究[J].飞行力学,2010,28(6):68-71.
Design of TT&C and Information Transmission System Based on a Model Free Flight Test
An Yujiao, Liu Zhaojun, Jing Li
(Aircraft Flight Test Technology Institute, CFTE, Xi’an710089,China)
Abstract:According to the technical requirements of free flight test, a tracking,telemetery and command(TT&C) and information transmission system used in model free flight test is designed. A number of key issues are broken through according to the system design requirements. The key design method and implementation process of the system are presented. The performance of the TT&C and information transmission system is tested through the ground test,including the receiver sensitivity performance test, the system delay performance test, and other kinds of performance tests. The test results show that the receiver sensitivity and link delay can meet the requirements of the model free flight test. It has an important reference value to the same kind of system.
Keywords:tracking;telemetery and command(TT&C) system;information transmission system; model free flight test
文章编号:1671-4598(2016)02-0111-03
DOI:10.16526/j.cnki.11-4762/tp.2016.02.030
中图分类号:V279
文献标识码:A
作者简介:安玉娇(1983-),女,河北唐山人,工程师,主要从事无人机与模型飞行试验技术方向的研究。刘朝君(1986-),女,陕西西安人,工程师,主要从事无人机与模型飞行试验技术方向的研究。
收稿日期:2015-10-06;修回日期:2015-12-28。
