基于MSP430的高精度角度测量传感器设计
2016-03-10 00:16:40电子科技大学涂浩翰廖永波
电子世界 2016年24期
电子科技大学 涂浩翰 廖永波 刘 憶 高 阳
基于MSP430的高精度角度测量传感器设计
电子科技大学 涂浩翰 廖永波 刘 憶 高 阳
目前很多重要的测控仪器如陀螺转台、惯导平台、经纬仪、星体跟踪器、雷达、导弹发射架、空间望远镜、高精度数控机床、机器人等系统中一般都需要角度传感器,用以测量被测物体相对于某基准方位的绝对转角或相对于自身在不同时刻的相对转角。本系统以MSP430单片机最小系统为核心,通过BM2502芯片和数码管显示部分设计了一款实现高精度测量的角度传感器。
MSP430单片机;BM2502芯片;高精度角度测量;传感器
1. 工作原理及系统组成
BM2502为北京时代民芯科技有限公司研发的一款线性霍尔传感电路,可以精确输出与磁场成正比的电压信号。高精度角度传感器利用利用BM2502霍尔芯片优良的输出特性,将机械结构的角度变化转换为磁场的变化,从而引起霍尔芯片输出电压变化,然后通过A/D采集电路将电压信号转换为数字信号,最终通过数字信号处理得到角度变化值,从而实现高精度角度测量,其原理如图1所示。

图1 基本原理图
高精度角度传感器系统由MSP430单片机、BM2502霍尔元件、带磁铁的机械部分和显示电路组成。单片机是整个系统的核心部件,它协调和控制各部分的工作,同时通过内部的A/D采样模块对霍尔元件的输出进行数字采样,在内部的软件算法处理后,将最终的角度值通过数码管进行显示。
2. 角度算法原理
2.1 电压与磁场的变化关系
BM2502为小型、通用、线性霍尔效应传感器,其输出信号电平决定于施加在器件敏感面的磁场强度,随磁场强度成比例地变化。当芯片处于零磁场条件时,其输出电压是电源电压的一半。S 磁极出现在标记面时,输出电压将随磁场强度增加而线性升高;相反,N 磁极将使输出电压随磁场强度增加而线性降低。BM2502 具有低噪声输出的特点,不再需要采用外部滤波。它还包括薄膜式电阻,能提高温度的稳定性和准确性。该传感器有着良好的线性度,并且输出电压与供电电压成正比,于是,我们让其置于均匀磁场空间内,如图2所示:

图2 传感器空间结构
以传感器的正面正对磁铁的某一极,并以垂直时候的最大输出(或最小输出)为基准,作为0°,若其磁感线与传感器正表面有角度偏移,设其偏移角为θ,对其磁场进行矢量分解,如图3所示:

图3 磁感线矢量分解
由图可知,有效作用的磁场强度为Bsinθ,故机械的角度变化值与霍尔元件的输出电压为正弦变化的关系,即通过输出电压求取反三角函数便能得到对应的角度值。
2.2 角度值算法
由于三角函数为非线性函数,同时在求取但三角函数值的时候,存在不同象限的两个不同角度值对应相同输出电压的情况,所以一片霍尔芯片无法确定具体角度值,在实际中我们选用两个垂直的BM2502芯片对角度进行测量。示意图如下图4所示:

图4 传感器结构设计
由图可知,角度测量部分主要由一个基准芯片和一个调整芯片构成。在工作中,首先由基准芯片的输出采样值计算出与基准线的夹角范围,然后通过调整芯片的输出值得出夹角的确定值。
设data输出的电压去增益和去幅值变换后的单位三角函数量,经过分析后,在0~360度范围内的计算公式分别是:
①arcsin(data)(在0~90度范围内);②180-arcsin(data)(d在90~180度范围内);③180+arcsin(data)(在180~270度范围内);④270+arcsin(data)(在270~360度范围内)。
3. 系统硬件设计
3.1 机械结构
由上述原理可知,角度偏差是由磁感线与芯片平面夹角的改变而引起的。这里需要一个恒定磁场,且磁场方向可旋转变化,这里我们设计结构如图5所示:

图5 传感器机械结构
由图可很清楚看出,该机械结构由两个均匀的强磁铁、旋转轴,支撑结构和霍尔元件构成。其中要求磁铁磁场强度足够强、磁铁体积足够大(霍尔元件体积相对磁铁可忽略不计),同时要求支撑结构足够稳定。在实际设计中,选定市面上材质为烧结钕铁硼强力磁铁(N35)。
3.2 采样电路及元器件选型
(1)MSP430单片机介绍
MSP430系列单片机是TI公司近年来推出的一系列优秀的混合型微处理器产品。MSP430单片机是一种基于RISC(精简指令集单片机)的16为混合信号处理器,专门为满足超低功耗需求而精心设计的单片机,同时具备很好的数字/模拟信号处理能力,具有智能外设、易用性、低成本、业界最低功耗等有益特性,能满足仪器仪表、工业自动化、国防、家居智能化、医疗保健、只能农业等多方面的需求环境。MSP430作为单片机最小系统的主控芯片,其特点如下:
●1.8V~3.6V超宽供电电压;
●五种低功耗模式,从Standby模式唤醒时间小于6ms;
●0.1uA RAM,保持;
●0.8uA实时时钟模式;
●2K RAM,60KB+256B Flash Memory(支持IAP);
●片内硬件乘法器支持四种乘法运算;
●两个具有PWM输出单元的16位定时器(TimerA3,TimerB7);
●两个UART接口,两个SPI接口(与UART复用);
●一个8通道12位模数转换器(ADC),具有片内参考电压源;
●一个模拟比较器,看门狗电路等。
在MSP430单片机选型上,由于市面上的MSP430F149较为常用也十分容易购买,同时不需要外接特殊A/D芯片就可以较高精度的A/D转换。在考虑成本方面,选用MSP430F149单片机作为主控芯片和A/D转换器也是一个重要的原因,其中单片机最小系统如图6所示。

图6 MSP430F149最小系统
(2)A/D采样模块
MSP430F149单片机内置了ADC12模块,ADC12是一个12位精度的A/D转换模块,由以下几个部分组成:输入的16路模拟开关、ADC内部电压参考源、ADC12内核、ADC时钟源部分、采集与保持/触发源部分、ADC数据输出部分、ADC控制寄存器等。在转换时会用到两个参考基准电压:一个是最大值,当模拟开关输出的模拟量大于或者等于最大值时ADC的输出数字量为满量程,也就是0xfff,另一个则是最小值,当模拟开关输出的模拟变量小于或者等于最小值时ADC内核的输出数字量为最低量程,也就是0x00。而且这两个参考基准电压是可以通过软件来设置的。

(3)霍尔元件传感器电路
由于霍尔元件的供电电压为5V,而查手册和实际测量时发现霍尔元件输出管脚电压值在1V-4V之间,同时由于程序编写时,将采用内部参考电压2.5V,故将霍尔元件的输出进行分压,如图7所示,采用两个100k欧姆的电阻,通过获取两个串联电阻中间点的电压值最后乘以标定的倍数(倍数要通过实际标定后写入程序中)来确定霍尔元件的实际输出电压值。
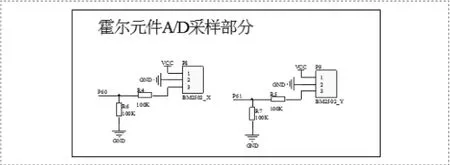
图7 霍尔元件采样部分电路
3.3 数码管显示电路
由于数码管的良好特性,系统采用数码管对角度值进行显示。此次设计的数码管电路由8段共阴级数码管构成,通过动态扫描的方式保证6个数码管可以稳定显示。因为MSP430F149是一款低功耗的单片机、其I/O端口的驱动能力十分有限,所以在数码管的端选信号、位选信号与单片机之间增加了两片74HC573,用作缓冲驱动,这样既可以正常驱动数码管又可以保护单片机的I/O端口不会因为电流过大而损坏。

图8 数码管显示电路
4. 参数标定与测试结果
4.1 单位化三角函数参数
(1)增益A的标定

(2)幅值(斜率)kB标定
在实际测试时,霍尔元件最大输出电压约为4V,最小电压约为1V,而由BM2502芯片手册的磁场强度与输出电压特性可知,在磁场变化的线性变化情况下,其斜率很容易得到约为1.5。故输出公式可写为:

4.2 测试结果
在检查完电路焊接,排除短路断路等情况后,接通电源,按下复位键将系统复位,然后将所有程序烧到芯片后,用手旋转机械结构旋转轴,观察数码管上显示的数字与实际角度是否相符,在测试完毕之后就可进行实际的角度测量,实际效果图如图9所示。
测试结果:系统能够很好的进行360度范围内的角度测量,通过实验可以看出,在旋转转轴到80度左右的位置时,数码管显示为83.647度,基本满足角度位置的判断。实际测试中发现该角度传感器在某一角度范围内精度也较高,能基本达到精度为0.05的指标。

图9 角度显示实际效果图
[1]马忠梅.单片机的C语言应用程序设计[M].北京航天航空大学出版社,2001.
[2]曹磊.MSP430单片机C程序设计与实践[M].北京航天航空大学出版社,2007.
[3]施保华,赵娟,田裕康.MSP430单片机入门与提高:全国大学生电子设计竞赛实训教程[M].华中科技大学出版社,2013.
[4]王化祥,张淑英.传感器原理及应用[M].天津大学出版社,2007.
[5]李玉江,张向明.霍尔传感器用于角度测量的一种方法[J].电子机械工程,2001,8(4):25-26.
[6]陈棣湘.基于霍尔传感器的高准确度磁场测量方法[J].传感器技术,2004,23(2):59-61.
[7]杨鹏,史旺旺,沈楚焱.基于线性霍尔传感器的角度测量的非线性校正方法研究[J].电子测试,2012:6-8.
[8]杨星.全角度无接触式智能角度传感器设计与验证[J].计算机工程与设计,2016,37(1):71-75.
[9]黄志瑛.三轴霍尔传感器MLX90316[J].广西轻工业,2010,4:49-50.
[10]季汉川.一种新型霍尔角度传感器的设计与分析[J].仪表技术与传感器,2012,8:9-11.
刘憶,男,电子科技大学硕士研究生。
高阳,男,电子科技大学硕士研究生。
涂浩翰(1993-),男,江西九江人,电子科技大学硕士研究生。
廖永波(1972-),男,电子科技大学副教授,博士。
猜你喜欢
电脑报(2019年2期)2019-09-10 07:22:44
科技风(2019年13期)2019-06-11 13:38:30
时代农机(2019年2期)2019-04-24 01:20:14
电脑与电信(2018年10期)2018-12-29 11:14:50
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
现代工业经济和信息化(2016年2期)2016-05-17 05:34:16
太空探索(2015年6期)2015-07-12 12:48:42
电子工业专用设备(2015年4期)2015-05-26 09:10:40
汽车维修与保养(2015年8期)2015-04-17 03:33:01
无机化学学报(2014年3期)2014-02-28 17:30:48