基于径向磁铁的非接触角度传感器
2016-03-10 00:16:40大连理工大学刘文宇闫晓鹏董维杰
电子世界 2016年24期
大连理工大学 刘文宇 闫晓鹏 董维杰
基于径向磁铁的非接触角度传感器
大连理工大学 刘文宇 闫晓鹏 董维杰
针对传统接触式角度传感器易磨损,磁阻式传感器测量范围有限的现状,利用线性霍尔元件以及径向磁铁,设计了一款非接触式角度传感器。将角度的变化转换成径向磁铁的同心转动,通过线性霍尔元件采集磁场转化为电压信号输入微控制器,经数字处理算法还原为角度输出。实验表明该传感器局部精度较低但具有360°采集、体积小、稳定性高等特点。在高稳定性低精度要求的场合能够很好的替代传统角度传感器。
径向充磁;线性霍尔;角度传感
1. 引言
角度是一个极其重要的物理量,目前的角度测量方式主要有接触式测量、磁阻式测量、光电式测量、磁电式测量等。接触式传感器在动态响应[1],耐磨损,使用寿命方面有很大的限制[2]。磁阻式传感器的灵敏度与测量范围成反比,若要实现360°测量会导致灵敏度的降低[3]。光电式传感器大多对环境要求较高,价格昂贵。磁电式角度传感器主要是基于霍尔效应,在非接触、高稳定性、低成本上有一定优势[4-5]。
2. 方案及原理
沿圆柱径向磁化得到的磁铁是径向磁铁,其磁感应强度具有很好的规律性[4]。如图1所示,将被测件与磁铁同轴连接,将被测件绕旋转轴的角度变化转化成径向磁铁绕磁铁轴线旋转,以旋转轴为z轴建立圆柱坐标系,在径向磁铁下方距轴线距离R1处磁感应强度与方位角α的关系满足正弦规律:B=A*sin(α)。其中B为磁感应强度,A为只与柱坐标系高度,磁铁半径相关的变量系数,α为方位角。

图1 径向磁铁示意
磁感应强度通过时代民芯公司开发的线性霍尔元件BM2502采集后转化为正弦规律变化的电压信号,通过AD转换输入微控制器,使用反正弦函数变换转化为数字角度信号。

图2 系统框图
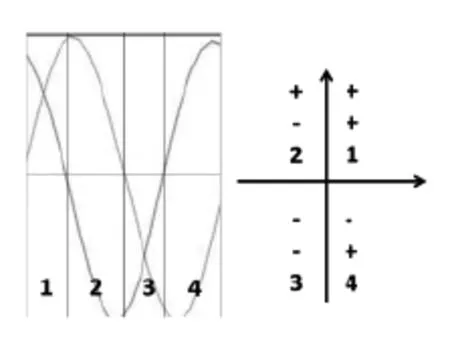
图3 信号相位与取值关系
径向磁铁下方磁感应强度与方位角α满足正弦关系。而反正弦函数值域为[-π/2,π/2],为保证获得的绝对角度范围为0-360°通过增加霍尔元件数量扩大采集角度的范围。要采集360°的角度至少需要两个安放角度为90°的霍尔元件。从而通过采集到的两个相位差为π/2的信号零点以及取值关系,确定绝对角度取值。如图3所示,为两个安放角度差为90°的霍尔元件的测量信号,当两个信号均处于正值时,判断信号位于第一象限,第一个信号为正值而第二个信号为负值则位于第二象限。以此类推,获得360°的角度测量范围。原理上两个传感器就能够完成360°角度采集,但是实测中,由于传感器的零点漂移,温度漂移以及安装角度偏差等将造成误差。以3.3V为供电电源为例,实验测得零点偏差为16mV,偏差随温度上升而增大。为减小误差采用四个传感器,两两之间角度为90°。取对角两传感器差分输入AD转换器,对角两传感器之间采集到的信号相位差为π,信号反相,差分输入后灵敏度为原先的两倍,消除了共模干扰。
3. 传感器硬件设计
本设计采用STM32微控制器作为数据处理核心,采用BM2502线性霍尔元件进行磁场采集。硬件电路主要分为控制电路和传感器电路两部分。
3.1 控制电路设计
控制电路主要包含以下及个部分:主芯片、电源去耦电路、晶振及初始化单元、外围输入调试电路、模数转换端口。
主芯片采用型号为STM32F373RCT6的微控制器,具有一个12Bit精度SAR 型AD 以及三个16Bit精度Sigma-delta型AD。电源去耦电路包括以ASM1117 3.3V LDO为主体的稳压电源,由10μF、100nF电容组成的滤波网络。以及AD参考源选取电路,AD参考源既使用电源,也可以通过外接基准源提供参考。晶振及初始化单元包括8M频率的石英无源晶振以及对应的起振电容和上电自动复位控制电路。外围输入调试电路包括一个用于调试编程的SWD接口、BOOT0启动端口、3.3V、5V、GND接口。模数转换端口包含SDAD0、SDAD1、AD0、AD1四个AD通道,可以选用2—4个通道分别连接相应个数的BM2502输出端口。
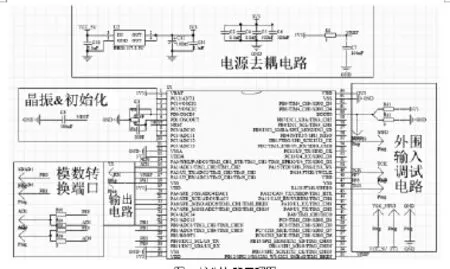
图4 控制电路原理图
为消除EMI干扰,整体PCB布局走线采用弧形布线。为保证传感器设计的便携性小型化,将控制电路PCB大小限制在18.62mm*20.93mm。输入调试电路以及模数转换端口能够精确实现与传感器电路PCB无缝对插。
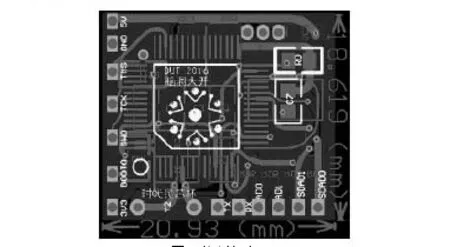
图5 控制电路PCB
3.2 传感器电路设计
传感器电路设计如图6所示,主要包含供电电路以及AD输出电路。电路PCB预留了四个两两之间角度为90°BM2502安装接口,通过大范围覆铜屏蔽电磁场,防止干扰。

图6 传感器电路PCB

图7 结构PCB
如图7所示,结构PCB由六个单独PCB板构成,已分别用数字标注。六个PCB板通过堆叠,构成立体结构,中心通孔为传感器、轴承、径向磁铁安装孔,周围三个通孔起定位以及螺丝固定作用。其中1、3、4、6结构组件完全相同,根据需要累加不同层数,为BM2502以及径向磁铁之间提供一个高度可设置的稳定的圆柱型腔。2和5是根据不同的轴承尺寸设计的传感器顶板,同其他结构件、轴承、中轴等配合,能够给径向磁铁构造一个位于BM2502霍尔元件正上的稳定转动平台。
传感器及结构组件采用了和控制电路相同的FR4材料和工艺直接生产,包括电路与机械的各个组件,实现了低成本、易维护。
4. 传感器软件设计
系统算法结构框图如图8所示,BM2502输出的电压信号需要进一步采集处理修正后才能作为最后的输出。
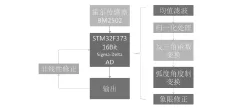
图8 算法框图
均值滤波是为了消除模拟数字转换过程中引入的转换噪声,通过多次采样取平均值的方式减小干扰。
归一化处理是为了消除不同BM2502霍尔元件的细微差异,同时将数据的取值范围变换到下一级处理的所需范围内。近似认为电机带动径向磁铁旋转速度均匀,那么获得的角度为线性变化,转化为正弦变化电压信号。通过上位机输出一段时间内采集的信号,利用MATLAB进行预处理,求得该信号的极值和零点漂移等常数,再将常数输入到单片机进行修正,修正后将信号的幅值统一到-1至1范围内,使其符合反正弦函数定义域要求。处理后的效果如图9所示。

图9 归一化处理示意
通过C语言标准库自带的反正弦函数,将正弦变化的电压转换为线性变化的角度。由于反正弦函数的值域为-π/2到π/2。要得到0-360°均匀变化的角度需要经过弧度角度变换以及象限修正。
弧度角度变换是将获得的弧度通过除以2π乘360°的方式转化为角度值。
象限修正的判定需要以一个信号为基准信号,另一个相位差为π/2的信号作为象限修正参考,通过上文提到的信号与象限关系,确定信号所在的象限。

图10 象限修正示意
经象限变换得到的角度信号,由于手工安装偏移、径向磁铁磁场分布误差、BM2502线性误差、AD采集误差等累积了大量误差,不满足精度要求。所以要在最后增加一级对非线性的修正。修正的过程是测量一系列参数,将标准值作为因变量,将实测值作为自变量拟合出一个函数关系,函数及曲线如图11所示。将此函数输入微控制器,对输出角度进行非线性修正。

图11 非线性修正拟合函数
5. 测试验证
设计安装如图12所示,利用结构层搭接传感器主体,通过螺丝固定。转轴通过轴承保证转动顺滑。

图12 实物组合图
由于该角度传感器的体积较小,为减小测量时的误差采用变通方案:利用电机带动转动轴旋转,将电机的旋转速度近似为定值,那么每次采集的时间间隔也近似相同,通过对读数极值之间分划取平均,则可以得到均匀读数时间间隔的实测值。图13中角度信号是将基准信号通过象限修正后的角度波,参考信号则是用于象限修正参考。锯齿极小值对应读数为0°,极大值对应读数为360°。
在对输出波形的多次测量中,未发现信号迟滞效应,稳定性好。
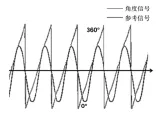
图13 输出图形
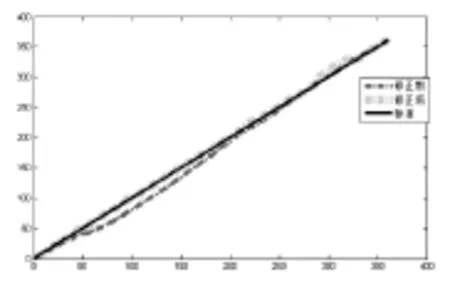
图14 测试结果
传感器测试结果如图14所示,实线为标准角度测量曲线,粗点划线为非线性修正前的信号波形,细点划线是通过非线性修正后,再次测量的波形。可以通过与实线的偏差判断角度偏差情况,经过函数非线性修正后角度值和标准值差的均值为1.7829°,方差为9.3193。总体而言角度偏差较大,但偏差部分主要集中在300°前后,初步判断是由于BM2502手工安装是角度差未严格保证,解决方法为重新安装以及进行二次非线性修正。
6. 结论
实验研究表明本设计的非接触式角度传感器在精度上有待加强,但是其多次重复的稳定性方面以及低成本小体积等优势能够保证其在对精度要求不高的场合有广泛应用。其非接触特性以及整体结构稳定性保证了可以通过多次非线性的修正或者限制使用角度范围的方式提高精度。
[1]郭华玲,孟立凡,冯伟.电位计式角位移传感器测试系统的动态性能研究[J].陕西科技大学学报,2010,28(6):87-105.
[2]印友军.基于霍尔原理的非接触式位置传感器的研究与应用[D].上海交通大学,2012.
[3]王超.基于AMR效应的磁阻角度传感器的设计[D].西北工业大学,2007.
[4]王新峰,许彬彬,戴立业,张金辉,陈文芗.一种基于径向充磁的霍尔式新型角度传感器[J].厦门大学学报:自然科学版,2016,55(1):126-130.
[5]张珂,杨其华,李冰,等.基于霍尔器件的非接触式角度传感器研制[J].传感技术学报,2008,21(6):981-984.
董维杰【通讯作者】(1968—),女,吉林白山人,博士,大连理工大学教授。
刘文宇(1995—),男,福建宁德人,大学本科,现就读于大连理工大学。
猜你喜欢
汽车维护与修理(2019年3期)2019-08-08 02:29:10
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
汽车维护与修理(2017年5期)2017-11-17 01:54:49
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
太空探索(2015年6期)2015-07-12 12:48:42
少儿科学周刊·儿童版(2013年2期)2013-05-13 09:21:06
世界科学(2013年6期)2013-03-11 18:09:39
数理化学习·初中版(2011年3期)2011-04-14 07:23:00
物理与工程(2010年2期)2010-03-25 10:01:58