
基于无线网络的地下车库LED灯光导航系统尚兆功
2016-03-07 01:34王升军郭祥洋刘玲云
现代建筑电气 2016年1期
关键词:算法
, 王升军, 高 鹏, 郭祥洋, 刘玲云
基于无线网络的地下车库LED灯光导航系统尚兆功
1,王升军1,高鹏2,郭祥洋1,刘玲云1

尚兆功(1990—),男,硕士研究生,研究方向为建筑智能化。
(1.山东建筑大学 信息与电气工程学院, 山东 济南250101;
2.山东省城乡规划设计研究院, 山东 济南250013)
摘要:介绍了基于ZigBee 网络的地下车库LED 智能灯光导航系统,利用车牌识别技术,在灯光的引导下可使车主在停车场快速找到空车位,同时能使车主在找到车辆后迅速找到车库出口。系统不仅能对车辆进行导航,还能合理控制车库内照明。结合具体车库实例,利用A*搜索算法进行了从入口到指定车位的路径计算,并进行了仿真。仿真结果表明,系统运行可靠,节能实用。
王升军(1990—),男,硕士研究生,研究方向为建筑智能化技术。
高鹏(1981—),男,工程师,从事建筑电气设计。
关键词:ZigBee网络; 灯光导航; 灯光控制器; A*算法
0引言
目前,大多数地下车库的管理主要通过入口处的道闸进行IC卡身份识别,符合要求的车辆一经识别即开闸放行;车库内的照明设备基本处于常亮状态;车库内缺少导航设备。车库的管理技术落后,缺乏智能化、自动化、信息化的先进管理技术。一方面,在入口处车主需要停车刷卡,高峰期易造成拥堵;另一方面,由于地下车库空间较大,车主寻找车位困难,浪费大量的精力和时间;除此之外,车库内大量的照明设备也易造成能源浪费。目前的车库智能系统在计费、进出口识别等功能发展相对较多,但在车辆入库后如何快速引导车辆在车库内停车等方面考虑不足,智能化程度低。
本文利用车牌识别技术、传感器技术以及无线通信技术,提出一种新的停车场运行模式,通过无线通信技术将整个车库内的所有节点联系起来,完成对整个车库的信息采集及行车导航。
1总体方案设计
基于ZigBee 网络的地下车库LED 智能导航系统主要由主服务器、ZigBee 无线网络、网络化灯光控制器组成,主服务器通过ZigBee 无线网络连接若干个网络化灯光控制器,车库内所有网络化灯光控制器通过ZigBee 无线网络将采集到的信息上传到主服务器。主服务器根据需求,通过ZigBee 无线网络将控制信号下发到各网络化灯光控制器,完成导航工作。
车库的运行过程包括车库入口处的视频识别、入口到车位过程中的行车监测和灯光导航、车库车位信息的实时监测和车辆出库的灯光导航。具体为车辆在入口处触发地感线圈进行摄像机图像抓拍,识别软件识别出车牌号,并进行数据库信息匹配。若该车匹配成功,道闸开启并记录车辆进入时间,管理中心计算机规划一条最优路径,并利用车辆探测设备进行实时检测,依次打开行车路径上的LED灯具进行灯光导航,直到车位探测器检测到车辆到达指定车位。当车辆离开时,触发车位上方的探测器并通知管理中心,管理中心规划驶离路径并进行LED灯光导航,使车辆顺利到达出口。
网络化灯光控制器主要由MSP430 微控制器、微波检测模块、超声波检测模块、ZigBee 无线模块、灯光控制模块组成。超声波检测模块探测车位状况,微波检测模块检测有无车辆移动信号,超声波检测模块用来检测车位上有无车辆,然后将车位占用信息通过ZigBee无线模块上传至数据处理中心。当检测到有车辆进入时,系统根据车位占用情况给车辆就近寻找空车位,然后通过系统预设的程序为车辆规划一条最优路径,并通过ZigBee无线模块下发指令,将该路径上的LED灯具通过灯光控制模块点亮,这样就能使车主很容易找到系统分配的空车位。
无线灯光控制器结构框图如图1所示。
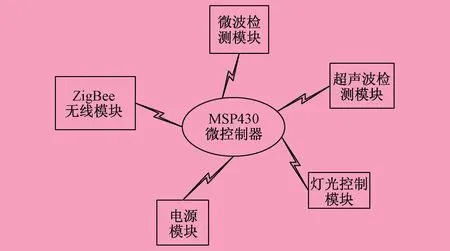
图1 无线灯光控制器结构框图
2网络化灯光控制器硬件设计
2.1 超声波检测模块设计
超声波测距原理:通过不断检测超声波发射后遇到障碍物反射的回波,从而测出发射超声波和接收回波的时间间隔,然后求出障碍物到超声波传感器的距离。
超声波检测模块原理如图2所示。该模块选取51单片机作为中心控制器,由单片机输出8个40 kMz周期的方波,经过6路反相器进行功率放大后驱动超声波发射探头,当超声波接收探头接收到返回的超声信号后,触发单片机的外部中断程序,单片机定时器得出时间差,实现距离的测量。超声波在空气中的传播速度受外界环境的影响,其中温度的影响最大,因此为了提高测量的准确性,必须进行温度补偿。
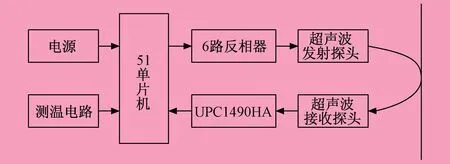
图2 超声波检测模块原理
超声波模块放在网络化灯光控制器上,距离地面约为3 m,要求控制器以下没有遮挡物,车的高度一般为1.1~1.8 m。微控制器通过定时器计算从发射超声波到接收超声波的时间,进而计算出障碍物到超声波传感器的距离。如果距离大于2.5 m,则认为车位无车;如果距离小于2.5m,则认为车位有车。
2.2 微波检测模块
微波模块主要用来检测有无移动车辆,当检测到有车辆移动时,灯被点亮,延时5 s,灯自动熄灭;当检测到没有移动物体时,灯处于熄灭状态。
本文选用HB100微波模块,主要用来检测探测范围内有无移动车辆,脉动输出频率与物体相对径向移动速度成近似线性关系,IF的输出幅度与物体的大小、距离有关。微波模块只输出峰峰值极小的多普勒频移信号,必须对输出的信号放大数千倍,微波信号通过带通滤波电路对信号进行频率外信号的滤除,运算放大电路将通过带通滤波器的信号进行两级放大,最后比较偏置电路将微波信号转变成方波信号,将信号送由单片机进行判断。如单片机检测到有效信号,则认为微波被触发,车辆正在经过该地点。
微波信号调理电路如图3所示,通过调整电位器R20可以调节探测距离。

图3 微波信号调理电路
2.3 无线通信模块组网
ZigBee接口电路的主要功能是串口转ZigBee无线传输,用户根本不需要考虑复杂的ZigBee协议,只需根据需要,利用ZigBee配置软件进行必要的配置,便可实现自动组网。
由于地下停车场规模较大,节点较多,对信息的准确性要求较高,因此选择网状网络作为地下停车场内的无线通信网络。ZigBee组网示意图如图4所示。总协调器是连接计算机与停车场内无线网络的桥梁,与一级子网络隶属于同一个网络。下一级网络的协调器与上一级的路由节点相连,实现了不同网络的互通互联,最终每个节点都能与数据处理中心进行通信。 总协调器作为通信中枢放置于车库入口道闸处,方便车牌识别后进行灯光导航,所有的导航信息和车位检测信息通过无线通信网络上传到管理中心,管理中心的控制命令通过无线网络下发。
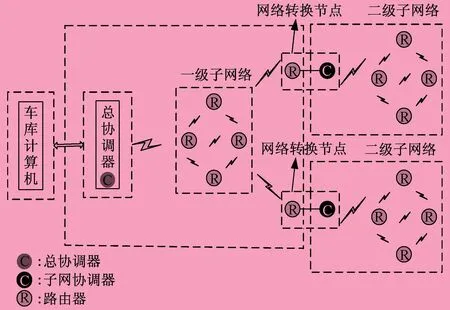
图4 ZigBee组网示意图
3停车场路径规划
车辆出入车库时,主控计算机为其规划一条最优路径,并点亮路径上相应灯具,对车主进行导航。路径规划应进行环境建模,环境建模的质量决定规划出的路径的优劣。
在求解最优路径过程中,以栅格法对车库进行建模,最短路径作为求解目标,运用启发式最短路径搜索算法中经典的A*搜索算法进行求解。
3.1 A*搜索算法
A*搜索算法的原理是设计一个估价函数:
f(n)=h(n)+m(n)
式中:f(n)——从初始点经由节点n到目标点的估价函数;
h(n)——在空间中从起始节点到当前节点n的实际代价;
m(n)——从当前节点n到达目标节点的预估代价。
通过估价函数对当前位置下一步能够到达的每一个点进行评估,搜索每一步,找到估价值f(n)最小的点作为路径节点,路径前进一步并根据算法继续循环。
A*算法的具体步骤:
(1) 创建一个develop表和一个path表,初始状态为空,把起始点s放入develop表中。
(2) 搜索develop表中节点,若develop表为空表,则表示没有找到路径,搜索失败。
(3) 若develop表不为空,则从中选一个f值最小的节点为最佳节点,将该节点记为b,把它放入path表中。
(4) 判断节点b是否为目标节点e,若节点b是目标节点,则成功搜出一条路径。
(5) 若节点b不是目标节点,则对其进行扩展,产生子节点b1、b2…,对每个子节点进行下列过程(以子节点b1为例说明):
① 如果b1已经在develop表中,计算h(b1),将develop表中原来节点b1称为为节点ob,比较h(b1)和h(ob)。如果h(b1) ② 若b1已经在path表中,则跳过该节点,继续扩展其他节点。 ③ 若b1既不在develop表中,又不在path表中,则把它放入develop表中,给b1加一个指向它的父节点b的指针,计算h(b1)。 (6) 转入第(2)步继续循环,直到找到解或者无解退出为止。 本文结合具体的车库实例,利用A*搜索算法搜索一条从入口到指定车位230的路径,并显示路径上的灯光控制器编号。 车库路径规划算法仿真图如图5所示。利用栅格法对整个车库建模,对车库路径搜索算法采用面向对象的编程语言C#进行了仿真模拟。 图5 车库路径规划算法仿真图 图5中每个栅格有四个坐标值,分别是x、y、x1、y1,其中x、y是每个栅格在仿真图上的坐标,是区分每个栅格的标志,通过x、y坐标的增减,表示每个灯光控制器与其周围控制器之间的关系,例如左上角第一个栅格,x=0,y=0,x1=5,y1=18.6,(0,0)代表该栅格,下方栅格为(0,1),右方栅格为(1,0)。x1、y1是根据车库CAD图得出的每个栅格实际地理坐标,在路径搜索过程中利用x1、y1可计算每个栅格的g、f值。 为了防止在路径规划过程中,车道和车位上的灯相混合,导致“穿越车位行驶现象”,表示车道灯光控制器的栅格始终为可行栅格,表示车位灯光控制器的栅格初始时设为不可行栅格,在发出查询命令后,目标车位栅格由不可行栅格变为可行栅格,而表示墙的栅格始终为不可行栅格。 首先确定起点和终点坐标,起点为入口对应的灯光控制器s(0,11),实际坐标为(3.7,78.5),终点为车位230对应的灯光控制器e(17,13),它的实际坐标为(86.5,93)。把起点s(0,11)放入develop表中,此时develop表中f值最小的节点b=s,把s放入path表,因s不是目标节点,对它进行扩展,产生两个子节点,位于上方的子节点b1(0,10),位于右方的子节点b2(1,11)。对每个子节点进行操作,b1既不在 develop 表中,又不在 path表中,把它放入develop表中,将s设为b1的父节点,调出b1的实际坐标(3.7,73),计算h(b1)=sqrt[(3.7-3.7)2+(73-78.5)2]=5.5,m(b1)=bbs(3.7-86.5)+bbs(73-93)=102.8,f(b1)=5.5+102.8=108.3;对b2进行相似操作,该点的实际坐标(7.5,78.5),h(b2)=sqrt[(7.5-3.7)2+(78.5-78.5)2]=3.8,m(b2)=bbs(7.5-86.5)+bbs(78.5-93)=93.5,f(b2)=3.8+93.5=97.3。此时,develop表不为空,f值最小节点b=b2,把b2放入path表中,经判断b2不是目标节点,对它进行扩展。依次类推,逐步计算下去,直到develop表中f值最小节点b=e(17,13)为止,这时表示成功搜出一条路径。本例采用四方向寻路,子节点只在当前节点的上下左右四个方向中的可行栅格中选取,不同节点的子节点之间几乎不存在交叉,对某节点扩展时其子节点通常不在develop表中,一般不需要修正h(ob)值。 经过验证,A*算法可以快速、高效地找到一条最短路径,一旦车库内环境发生变化,可迅速重组地图,以当前位置为起点,再次调用A*算法,搜索最短路径。 4结语 该系统能够为车主快速入车库停车提供便利,工作稳定可靠,适用性强,且能够节省大量停车过程中不必要的等待时间,节约电能,使整个车库运行成本降低。无线通信的使用也使整个车库的信息交互十分方便,提高了地下车库的管理效率和管理水平。 参考文献 [1]许增昭,许伦辉.Dijkstra改进算法在泊位诱导系统中的应用与仿真[J].科学技术与工程,2009(12):7226-7228. [2]何体雄.停车场泊车诱导系统构成[J].中国公共安全:智能交通,2007(9):45-47. [3]董加敏.停车场管理系统的设计与优化[J].河南师范大学学报:自然科学版,2007,35(1):190-193. [4]李林.智能停车场系统的设计与实现[D].大连:大连理工大学,2009. [5]梁颖,刘劲夫.城市停车问题对策研究[J].道路交通与安全,2004(1):9-14. [6]田硕.地下停车场LED智能照明及停车引导系统的研究[D].西安:陕西科技大学,2014. [7]RYBAKOV V.Linear temporal logic with until and next,logical consecutions[J].Annals of Pure and Applied Logic,2008,155(1):32-45. [8]鲍卫兵.住宅小区出入口车辆智能管理系统的实现[J].工业仪表与自动化装置,2010(4):40-43. 【办刊宗旨】 以现代信息技术、先进制造技术和智能建筑技术为引导,引领建筑电气技术不断开拓自主知识创新,向着高效、节能和绿色的目标和方向发展。及时、全面地报道国内外建筑电气最新研究成果和行业信息,为建筑电气的研究与开发、产品制造与应用、工程设计等领域打造一流的技术交流和信息传递平台。 Underground Garage LED Lighting Navigation System Based on Wireless NetworkSHANGZhaogong1,WANGShengjun1,GAOPeng2,GUOXiangyang1,LIULingyun1 (1.School of Information & Electrical Engineering, Shandong Jianzhu University, Jinan 250101, China; 2.Shandong Urban and Rural Planning and Design Institute, Jinan 250013, China) Abstract:This paper introduced the intelligent light navigation system based on LED.Using the license plate recognition technology,the car owner can find an empty parking spaces easily.At the same time,the system is helpful for people to find the exit if the car owner want to leave the garage.The system cannot only be used for navigation of vehicles,but also reasonably control the garage lighting.A path from the entrance to the specified parking lot was calculated by using A* search algorithm.The simulation results show that the system is reliable in operation,energy saving and practicality. Key words:ZigBee network; light navigation; lighting controller; A* algorithm 收稿日期:2015-09-11 中图分类号:TU 113 文献标志码:B 文章编号:1674-8417(2016)01-0032-053.2 计算实例

猜你喜欢
成都信息工程大学学报(2021年3期)2021-11-22
成都信息工程大学学报(2021年1期)2021-07-22
成都信息工程大学学报(2021年1期)2021-07-22
小学生学习指导(高年级)(2020年12期)2021-01-07
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
成都信息工程大学学报(2019年4期)2019-11-04
阅读与作文(英语初中版)(2019年8期)2019-08-27
小学生学习指导(低年级)(2018年11期)2018-12-03
西安工程大学学报(2016年6期)2017-01-15
现代防御技术(2016年1期)2016-06-01
