全电子自动复原道岔模块的研究
2016-03-02 03:28:58韩思远梁玉琦
铁道标准设计 2016年2期
韩思远,梁玉琦
(兰州交通大学光电技术与智能控制教育部重点实验室,兰州 730070)
全电子自动复原道岔模块的研究
韩思远,梁玉琦
(兰州交通大学光电技术与智能控制教育部重点实验室,兰州730070)
摘要:介绍一种全电子计算机联锁四线制道岔自动复原模块,来取代原来安全型继电器组成的道岔执行电路。全电子计算机联锁模块主要有微控制器MCU、可编程逻辑器件CPLD、道岔驱动电路、道岔表示电路、道岔检测电路和自动复原电路等组成。自动恢复电路包括驱动电路和继电器等组成。计算机联锁系统通过定位和反位检测单元检测电路中是否有表示电压,来决定微控制器MCU计时与否。道岔由定位转向反位或由反位转向定位时,若在规定的时间不能密贴,微控制器MCU发出继电器Js驱动指令,驱动继电器Js动作,通过继电器Js的接点,控制系统发出相反的转换指令,使道岔自动恢复到原来的位置。最后,提出了软件设计方案,用流程图对软件工作原理进行了说明。
关键词:四线制道岔;全电子;计算机联锁;自动复原
1概述
目前,四线制道岔主要是以6502电气集中和计算机联锁控制为主导,但是随着计算机时代和硬件的不断进步,全电子计算机联锁道岔的控制系统得到了飞速的发展[1]。全电子道岔执行模块已逐步投入生产,并在一些站场上得到了应用。当道岔从定位(反位)向反位(定位)转动时,道岔尖端有异物,使道岔转换不到密贴的位置,或者是在联锁试验期间,如果没有操作人员进行相反方向的操作,可能造成转辙机长时间的转动。不仅有损转辙机的寿命,也使驱动道岔转辙机转动的模块等硬件寿命受到损害,不利于铁路运输的高效性和安全性。
全电子计算机联锁具有可靠性高、体积小、功能强大、便于实现远程控制和远程诊断等特点[2],是铁路信号控制系统发展的一个必然趋势。因此,提出了利用全电子计算机联锁模块,实现四线制道岔自动复原的研究。自动复原电路的开发设计主要包括硬件电路板的设计和设备控制软件的编写和调试。
2道岔自动复原的转辙机条件
转辙机是铁路道岔转换设备的核心[3],有电动机M带动,是用来带动道岔动作的机械装置,转辙机内有动作杆和表示杆两个杆件连接到道岔上,动作杆是用来带动道岔动作的装置,表示杆是用来表示道岔实在定位或反位的装置。
不论是6502电气集中、计算机联锁还是全电子计算机联锁,室外道岔的转辙机配线图不会改变[4],如图1所示。图1是道岔处在定位时的电路图,动作接点11-12和31-32,表示接点13-14和33-34都在定位,此时室内DBJ处在吸起状态。当道岔从定位转到反位时,X2和X4通DZ220和DF220两路电源,转辙机M通电之后就会转动,首先动作的接点是31-32和33-34接点断开,41-42和43-44接点闭合。当道岔转到反位位置达到密贴条件时,21-22和23-24接点会闭合。反位向定位转动时,过程与上边相反,不再赘述。

图1 道岔定位电路
因此,全电子道岔自动复原模块利用定位向反位转动41-42先闭合和反位向定位转动11-12先闭合的特点,再利用全电子模块对X1和X2为转辙机提供不同的电源,实现当遇到道岔转动过程中被异物卡住等问题,不能达到密贴条件时,自动恢复到原位的目的。
3自动复原电路的设计与分析
3.1 驱动模块设计
驱动模块是用来发出道岔定位操作和反位操作执行命令的单元。本文设计的驱动模块主要有两个MCU、同步校验单元、“与”电路和CPLD等构成。MCU是用来发出道岔操纵指令和接受反馈指令;同步校验是用来实现两个MCU在同一时刻发出指令;“与”电路是实现两个MCU错误的诊断。
道岔自动复原全电子驱动模块的设计,首先要满足故障-安全[5]的基本要素。如图2所示,驱动模块设计了MCU1、MCU2两个微控制器,其中MUC1接受CAN总线1传递来的指令,并进行运算分析;MUC2接收CAN总线2传送来的指令[6]。CAN总线1和CAN总线2是由计算机的两路CPU分别发出的指令,如果两路微控制器经过“与”电路的计算结果正确,把指令传递给CPLD进行区分是定位操作还是反位操作。经过CPLD的逻辑运算[7],然后把记过传递到I/O模块。现代处理器处理数据的速度越来越快,即使CPU发出的是相同的软件代码,也不能保证CPU1和CPU2运算过程完全同步,因此全电子道岔自动复原模块设计采用了同步控制器。
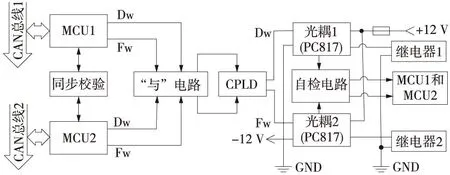
图2 驱动模块硬件原理
采用2条CAN总线的目的是,让两个微控制器的输入来自两个CPU的相同指令,无论是CPU运算出了问题还是MUC1或MUC2出了问题,经过“与”电路判断后,结果是低电平,电路都不会有输出。例:当MUC1和MUC2接收到指令后发出Dw和Fw两种指令,经过“与”电路的判断,如果MUC1和MUC2发出的指令相同,则得到一个高电平,输出Dw或Fw;如果MUC1或MUC2出现故障或其中一个CPU发出了错误指令,系统则不会发出操作指令,导向安全侧。当光耦1或光耦2接收到“与”电路发来的指令后,PC817光耦导通,使+12V的电源传到继电器侧,使继电器1或继电器2工作。当光耦1和光耦2同时工作时,自检电路会向MUC1和MUC2反馈信息,停止工作并发出报警信号。由于铁路需要寿命长、高可靠性和全电子要求抗干扰性强、体积小等问题,是PC817成为本驱动电路设计的选择[9]。
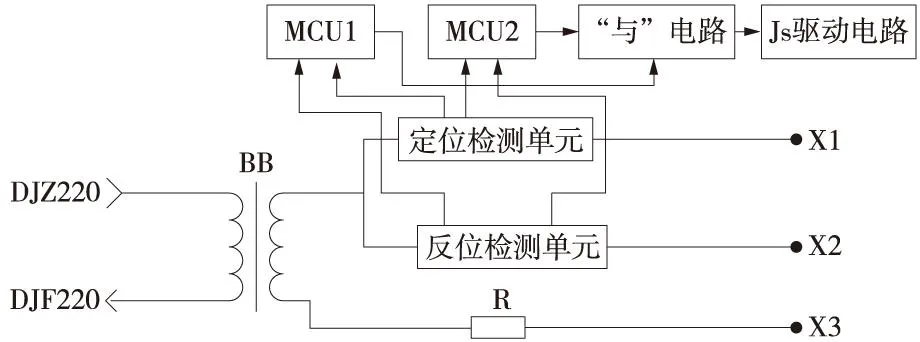
图3 道岔表示功能原理
四线制直流转辙机工作需要DZ220和DF220两种电源,如图1所示,当X1和X4接通DZ220和DF220时,直流电会通过X1,41-42,1,4和05-06接通到X4,转辙机向定位转动;当X2和X4接通DZ220和DF220时,直流电会通过X2,11-12,2,4和03-04接通到X4,使转辙机向反位转动。当车务人员发出定位指令后,指令通过主板的输入/输出接口传递给计算机,计算机的CPU1和CPU2经过对联锁条件判断,决定是否发出定位操作指令。如果条件满足,指令会通过CAN总线1和CAN总线2分别把指令传递给MUC1和MUC2,经过“与”运算、强弱电压的隔离等,使继电器1吸起。如图2所示,当继电器1吸起后,图4中的J1的接点闭合,X1和X4分别带有DZ220和DF220两种电,转辙机M向定位转动。同理,当车务人员发出反位操作指令时,J2闭合,转辙机M向反位转动。
3.2 表示和自动复原模块设计
表示模块是用来采集道岔是在定位还是在反位的单元,并把采集到的信息反馈到MCU中,为MCU判断是否执行下一步操作提供依据。
道岔表示模块依然采用DJZ220和DJF220输入电压,通过表示变压器(BB)变压后,输出到室外转辙机的原理,如图3所示。表示变压器(BB)不仅能把电源和现场设备进行隔离,而且完成了一次变压的转换;电阻R是为了防止电压过大,对检测单元造成烧毁等严重后果,起到限压保护检测单元的目的。定位检测单元或反位检测单元用来检测道岔是处在定位状态还是反位状态,无论道岔被检测到是处在定位状态还是反位状态,两个检测单元都实时的向MCU1和MCU2反馈信息。MCU1和MCU2又实时的传递他们接收到的信息,当两个检测单元同时采集到道岔表示的信息,会向计算机联锁系统发出联锁条件不成立的信息,进路不会被建立,并发出报警,保证了铁路运营的安全性。

图4 自动复原功能原理
四线制道岔定/反位转换的时间一般在10 s以内[8],这里假定道岔转换时间为10 s。当MCU1和MCU2都采集不到表示信息,两个微控制器同时进行计时,计时时间到达10 s,MUC1和MUC2还是采集不到道岔的表示信息,他们同时发出继电器Js的驱动指令。两条指令通过安全“与”电路的运算,如果两条指令相同,同为高电平“1”,则输出对Js驱动的指令;如果两条指令不相同,经过“与”电路后,输出一个低电平“0”,不对Js进行驱动,确保了输出安全,也达到了故障-安全的原则。自动复原电路的实现,是基于图3和图4两张原理图完成的。继电器Js被驱动后,图4中的Js接点就会吸起,把X1和X2的两路DZ220电源进行交换方向。例如,道岔从定位转到反位,如果道岔中有道砟卡住,不能达到密贴,转辙机运转到8 s[10],继电器Js吸起,断开X2的通路,把DZ220接到X1。如图1所示,接通了X1、41-42、转辙机M和X4这条通路,使转辙机在转回到定位状态,实现在无人工操作的条件下自动复原的目的。图4中,Js处在落下状态,当继电器Js吸起后,Js接点同时断开了X1和X2两路电源,达到了两路电源互不影响的目的,因此转辙机不会出现错误动作。
4全电子四线制自动复原道岔模块的软件设计
软件部分实现了硬件电路与安全技术要求,如果MCU正常接受命令信号,对控制命令进行逻辑运算和校验,发出对转辙机的控制指令,同时对道岔的表示信息进行采集,判断道岔所处的位置,保证了逻辑控制的可靠性。

图5 自动复原模块软件设计
道岔自动复原模块的主控软件流程如图5所示。程序在上电时,首先对模块进行初始化和自检,当MCU1和MCU2反馈的数据正确一致后,对输入的指令进行处理,输出道岔的控制命令,与此同时定/反位检测单元不断检测,是否有表示电源反馈回来,如果10 s内没有表示电源反馈,程序驱动继电器Js,接通道岔复原电路;如果有表示信息被传递回来,并且是正确的状态,模块会把信息传递给联锁机,执行进路的其他联锁关系。
5全电子道岔自动复原模块与继电计算机联锁的比较
全电子模块与传统的继电联锁相比,有以下诸多优点。
(1)全电子道岔模块配线更加简单,直接采用模块化生产,节省了很多继电器和电线等材料。道岔模块直接输出DZ220和DF220,通过室内分线盘和电缆线,直接与室外转辙机相连接,减少了很多故障点,在检查道岔故障的时候更加迅速便捷。
(2)能够实现自动复原的功能。目前现场使用的道岔联锁关系不能实现自动复原的功能。当值班人员疏忽时,可能造成转辙机烧毁,给运营安全带来很大的危险。
(3)占地面积明显减少。对于一个16组道岔的车站,电气集中需要9个组合架,而全电子系统仅需要2个机柜。电气集中安装道岔继电器的组合架,现在只需要2个道岔执行模块的位置,1个主机1个备机的位置。
(4)在不中断运营的情况下,便于安装、更换。当道岔模块出现问题时,模块会发出报警,值班人员非常容易找到故障具体位置,及时进行更换,不用再去非常繁琐地查找继电器联锁电路故障点,判断故障点,节省时间。
6自动复原模块的可靠性分析
铁路控制系统对安全有着非常严格的要求,有效精确地分析道岔自动复原控制电路的可靠性非常重要。比较了“故障树分析法的接触网可靠性分析”[10]和马尔科夫模型方法[11-12],最后选用马尔科夫模型方法对其可靠性进行分析。
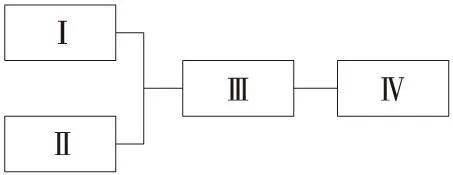
图6 马尔科夫模型
根据以上对驱动模块、表示采集模块和自动复原模块的分析,建立如图6所示的马尔科夫模型。模型把全电子电路等效为4个部分:Ⅰ包括表示模块、MCU1、通信电路及检测单元;Ⅱ包括表示模块、MCU2及检测单元;Ⅲ包括驱动模块、道岔动作电源控制电路、通信部分;Ⅳ包括晶振电路、自动复原电路及复位电路。
6.1 4个部分的可靠性和平均故障间隔时间
(1)Ⅰ、Ⅱ模块可靠性
Ⅰ部分的故障率分别为λ11、λ12、λ13、λ14,可靠度为R1(t),平均故障间隔时间MTBF1。
经过计算,得
(1)
由于Ⅰ模块和Ⅱ模块完全一样,于是Ⅰ模块和Ⅱ模块综合可靠度R12(t)为
(2)
(2)Ⅲ模块可靠性
驱动模块、道岔动作电源控制电路、通信部分及Ⅰ驱动电路故障率为λ31、λ32、λ33、λ15,则其可靠度
(3)
(3)Ⅳ模块可靠性
晶振电路、自动复原电路及复位电路故障率为λ41、λ42、λ43,则可靠度
(4)
6.2 全电子道岔电路的可靠性和平均故障间隔
元件的失效率与元件的基本失效率、设备的工作环境、元器件质量等有密切关系。根据《电子设备可靠性预计手册》(GJB/Z 299C—2006)中获得元器件的失效率,如表1所示。综合式(1)~式(4),根据表1的数据可以得到整个道岔模块的平均故障时间间隔为
系统故障率为
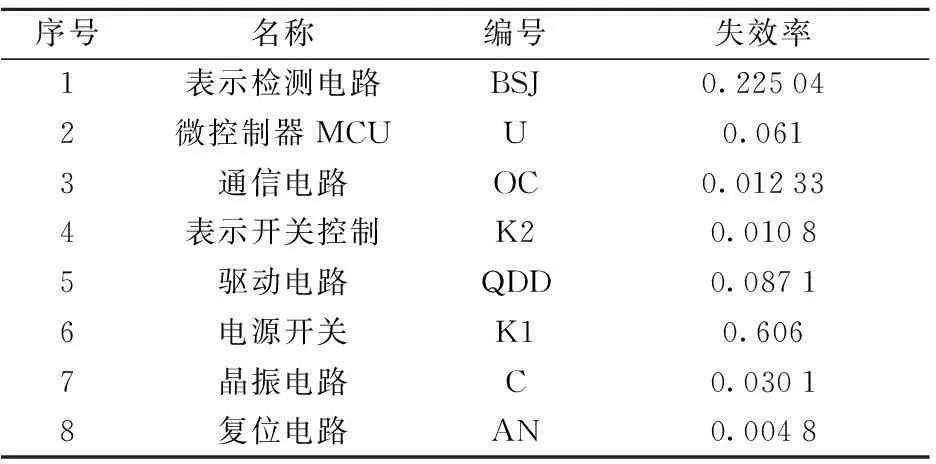
表1 各元器件失效率
7结语
全电子四线制道岔自动复原模块采用了安全防护技术、冗余技术和全电子化技术等,以安全便捷的方式实现了道岔的自动复原功能。当道岔复原后,计算机
软件会对道岔进行标记,以便工务人员及时处理。模块采用了双机热备技术,当主机模块出现故障,备机马上接替任务,不会出现运营中断,提高了道岔的安全性,全电子化模块满足了铁路安全和效率的统一,是未来发展的必然趋势。
参考文献:
[1]陈光武,范多旺,魏宗寿,等.基于二乘二取二的全电子计算机联锁[J].中国铁道科学,2010,31(4):138-143.
[2]何涛,范多旺,魏宗寿,等.铁路车站信号计算机联锁全电子执行单元研究[J].铁道学报,2007,29(2):118-121.
[3]高晓丁,佟元江,王跃杰,等.电动转辙机工作特性分析[J].铁道通信信号,2001,37(1):23-25.
[4]朱军.双控道岔联系电路的设计与实现[J].铁道标准设计,2015,59(4):125-128.
[5]赵志熙.车站信号控制系统[M].北京:中国铁道出版社,1993
[6]王家刚.联锁道岔电子控制模块的研究[D].北京:清华大学,2009.
[7]黄正瑾,徐坚,章小丽,熊明珠等.CPLD系统设计技术入门与应用[M].北京:电子工业出版社,2002.
[8]杨巍巍,史永胜,牛力.多路输出反激式开关电源的改进与实现[J].计算机测量与控制,2014,22(1):188-191.
[9]郭进,魏艳,等.铁路信号基础设备[M].成都:西南交通大学出版社,2008.
[10]赵琼,王思华,尚方宁.基于故障树分析法的接触网可靠性分析[J].铁道标准设计,2014,58(1):105-109.
[11]张育林,李东旭.动态系统故障诊断理论与应用[M].北京:国防工业出版社,1997.
[12]Harris D E. Built-in Test for Fail-Safe Design. Proceedings of the Annual Reliability and Maintainability Symposium[J]. Microelectrionics Reliability, 1987,27(2):383.
Research on All electronic Switch Automatic Recovery ModuleHAN Si-yuan, LIANG Yu-qi
(Key Laboratory of Opto-Electronic Technology and Intelligent Control of the Ministry of Education,
Lanzhou Jiaotong University, Lanzhou 730070, China)
Abstract:The automatic recovery module of four-wire switch of all electronic computer interlocking systems is introduced to replace the former switch executive circuit made of safety relay. The module includes micro-programmed control unit, complex programmable logic device, switch driving circuit, switch indication circuit, switch detection circuit and automatic recovery circuit. The computer interlocking system determines the MCU timing when there is an indicative voltage in the positioning and reversing detection units. When the timer reaches pre-set time and the switch fails to close at the stipulation time, MCU activates electric relay Js and the control system sends out reversed switching order for automatic recovery via Js contact. Finally, the scheme of software design is proposed and the working principle of the software is illustrated with flow chart.
Key words:Four-wire switch; All electronic; Computer interlocking systems; Automatic recovery
中图分类号:U284
文献标识码:A
DOI:10.13238/j.issn.1004-2954.2016.02.028
文章编号:1004-2954(2016)02-0136-04
作者简介:韩思远(1987—),男,硕士研究生,E-mail:931018167@qq.com。
基金项目:兰州交通大学青年基金(2014031)
收稿日期:2015-06-04; 修回日期:2015-06-15