
三维激光扫描技术在公路边坡监测中的应用
2016-02-15 06:18宋礼德招商局重庆交通科研设计院有限公司重庆400060
低碳世界 2016年36期
宋礼德(招商局重庆交通科研设计院有限公司,重庆400060)
三维激光扫描技术在公路边坡监测中的应用
宋礼德(招商局重庆交通科研设计院有限公司,重庆400060)
三维激光扫描技术以其快速、精确、非触主动测量等优势,针对此,提出利用三维激光扫描来对边坡的滑坡情况进行监测,为了提高滑坡监测的精度和可靠性。本文简要介绍了三维激光扫描技术的工作原理,阐述了其在公路边坡监测中的具体应用。
三维激光扫描技术;公路边坡;监测
1 引言
传统的测绘方式存在着“以点带面”的局限性,影响着数据分析的准确性。三维激光测量技术的出现克服了传统测量的局限性。它不仅能够量取被测对象的长宽高,还能够对对象进行无接触扫描,可以将所扫描到的空间信息快速转换成计算机可以处理的数据。公路边坡监测是一种重要的工作,三维激光扫描技术的应用可以弥补传统测量方式的弊端,提升测量的科学性和有效性。
2 三维激光扫描技术的工作原理
三维激光扫描技术又被称为“实景复制技术”,实质上是一种新型的测量模式。作为一种技术性手段,主要采用激光扫描的方法对目标物体进行测量,获取物体表面的三维坐标数据,结合空间点位信息,建立物体的三维影像模型。三维激光扫描仪工作原理为借助测距系统获得每个扫描点和扫描仪之间的距离数值,并使用精密时钟控制编码器测角系统获得每个激光束相对一起坐标系的水平角α以及垂直角(图1)。按照公式(1)计算出每个扫描电和扫描仪空间相对三维坐标数值,分别标记为Xp、Yp、Zp,在扫描过程中可以通过自身的垂直以及水平马达等设备,实现对目标物体的全方位扫描,并最终获取扫描物体的点云数据。

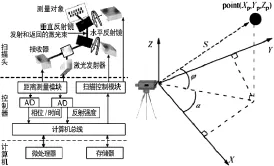
图1 三维激光扫描工作原理示意图
3 三维激光扫描技术在边坡测量中的应用
3.1 数据采集
三维激光扫描仪由于受视场角限制,为获取整个物体表面的数据,需要从不同视角进行多次扫描,完成各扫描站之间的数据配准。在扫描中,为了获取点云精确空间位置信息,应将三维激光扫描仪的摄站位置安置在三等导线点及二级三角点上,选择远距离三等导线点作为后视点,对公路边坡表面进行360°全方位扫描,使用随机控制器记录扫描数据。三维激光扫描仪的扫描距离是影响扫描精度的关键因素。尽管扫描距离的增加可以增大扫描范围,减少设站次数,然而采集的数据精度也随着距离的增加而递减。
3.2 数据处理
在三维数据处理过程中,数据去噪较为重要。因为激光扫描仪自身具有一定的局限性,且在扫描过程中会受到外界环境的影响,扫描目标会得到阻挡以及遮掩,生成的数据通常会有大量的噪声点,其会对数据的后期处理造成较大影响,同时也会降低变形监测的精度,这也就增加了变形探测的难度。所以为了获取目标物体信息的最佳值,需要对扫描获得的原始数据中的干扰地物进行处理,避免其对于后期的粗差剔除造成影响。在剔除噪音数据后需要进行深化处理,排除带有粗差数据信息以及无效的形体信息。
3.3 边坡位移监测成果报告
3.3.1 边坡位移预警
可以使用三维激光扫描技术对边坡进行监测,及时发现和预防滑坡、泥石流灾害的发生。通过三维成像可以清晰看见土坡的前后变化,作为地质工作人员,需要对地质三维视图的变化以及土坡的安全稳定性进行比较分析和评价,若出现较大位移则需要立即撤离,并停止道路通行。
3.3.2 监测频率
项目监测频率会受到外部环境的影响,如地段的危险性和气候条件。在雨季中需要增加监测的次数,通常来说一个季度监测次数定位1较为合理,对于雨季则需要一个月监测1次。若发生暴雨,在条件允许的情况下需要跟踪观测,及时发现问题及时解决,并及时安排人员撤离,维护人民的生命安全。
3.3.3 监测精度
三维激光扫描技术具有精确度高的特点,因此,在测量过程中,要严格按照规范进行操作,降低误差的发生率。在测量中,三维激光扫描技术的误差有具体的规定。①测量过程中,控制点的测量误差范围为±2mm;②点云拼接精度为±1mm;③数据处理比较过程中,线、面各自的比较时,点云拟合精度为± 1mm;④测量过程中,不可避免的会受到人为或天气的影响,总体的误差范围为<6mm。总之,在检测、处理数据时,要严格按照规范操作,尽可能的利用相同的作业条件、减少通车及噪音数据的影响,提升监测的精度。
4 实例分析
本文采用Riegl-VZ400扫描仪对某公路边坡进行两期扫描,第一期扫描是在2015年10月,第二期是在2015年12月,扫描仪的位置位于边坡体的对面,扫描平均距离为40m,为了估计所计算变形提取阈值的可靠性,在边坡没有发生滑坡的情况下对其进行两次重复扫描,并利用块状物体在边坡体上模拟一处滑坡,该物体的厚度为0.05m,扫描过程中设置的扫描间隔为8mm。根据Riegl-VZ400扫描仪技术参数,计算变形提取的阈值为0.0136m。利用第3节变形提取方法对没有发生滑坡的边坡体进行分析,提取的边坡点位限差分布。边坡在没有发生滑坡的情况下,点云点位误差主要集中在[0,0.014]m之间,最大限差为0.014m。在连个月之后对该边坡进行了二次扫描,在本次扫描前受到了雨水的侵蚀,尤其是在2015年10中下旬有两次暴雨,对边坡造成了较大损坏,在11月中旬又经历过小雨的侵蚀,最终导致边坡冲蚀以及边坡滑坡的发生。根据该边坡体的滑坡实际情况来看,边坡的变形分布具体如图2所示。由图2可知,计算出的最大变形量为0.3839m,图中椭圆形区域是边坡体发生的主要滑坡区域,其中白色箭头为滑坡发生方向,矩形区域是模拟的滑坡区域,依据右边的变形值柱状图可知,模拟变形主要集中在0.036m周边,实际发生的滑坡值为0.05m,造成这一问题的主要原因是点云自身有0.014m的限差误差。该滑坡体共有4处,主要原因为雨水冲蚀,与此同时由图2中的椭圆形以及圆形滑坡区域可知,可以使用滑坡提取法对滑坡的发生位置以及发生区域进行计算,并且明确滑坡的体积以及方向。
5 结束语
计算机技术的发展,推动了三维激光扫描技术的出现及应用。在公路边坡监测中,采用三维激光扫描技术,通过对三维点云数据的获取和处理,分析边坡的位移情况和趋势。同时,三维激光扫描技术不需接触测量,不需事先埋藏检测设备,降低工作人员的工作量和危险系数,提升监测的速度和精确度。因此,三维激光扫描技术具有先进的技术优势应用前景广阔。
[1]邢正全,邓喀中.三维激光扫描技术应用于边坡位移监测[J].地理空
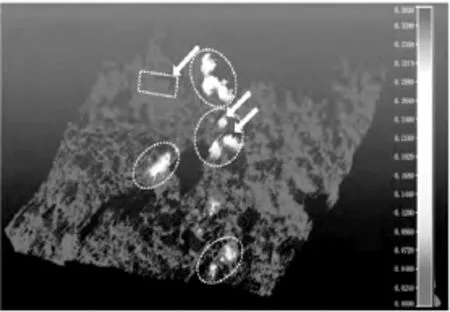
图2 提取的滑坡变形区域
间信息,2011,09(1):68~70.
[2]李 健,胡书桥,邓增兵.基于综合改进ICP算法的三维激光扫描技术在露天矿边坡测绘中的应用[J].煤田地质与勘探,2012,40(1):51~54.
[3]蓝紫坚.三维激光扫描技术在边坡灾害治理工程中的应用[J].广东科技,2010,19(4):91~92.
U416.14
A
2095-2066(2016)36-0230-02
2016-11-8
宋礼德(1971-),男,高级工程师,本科,主要从事高速公路项目勘察设计管理及勘测新技术应用研究工作。
猜你喜欢
河北地质(2021年1期)2021-07-21
中学生数理化·高一版(2020年1期)2020-02-20
模具制造(2019年3期)2019-06-06
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
中国公路(2017年18期)2018-01-23
北方交通(2016年12期)2017-01-15
山东青年(2016年3期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
科普童话·百科探秘(2015年4期)2015-05-14
现代营销·经营版(2015年3期)2015-04-20
