一种弹载相控阵天线波束控制系统设计
2016-02-11 08:58姚志文
航空兵器 2016年6期
姚志文
(中国空空导弹研究院,河南 洛阳 471009)
一种弹载相控阵天线波束控制系统设计
姚志文
(中国空空导弹研究院,河南 洛阳 471009)
介绍了一种弹载相控阵天线波束控制系统设计与实现技术,采用主机集中运算方案,利用合理的总线分配和FPGA并行处理能力,实现了波控码并行计算与数据传输,仿真与测试结果表明,该系统能够满足弹载应用的实时性和稳定性。
相控阵天线; T/R组件; 波束控制; FPGA
0 引 言
相控阵雷达导引头具有功率密度大、电扫描快速跟踪、多目标信息提取、空时自适应信号处理(STAP)、自适应抗干扰、体积小和可靠性高等多种优势,越来越多地被用于战术导弹系统,其中包括美国新一代空空导弹、先进反辐射导弹、“战斧”反舰巡航导弹、巡航导弹拦截弹、欧洲近距防空导弹等,装配相控阵天线的相控阵导引部件正在引领新一代雷达弹的发展方向。
波束控制系统是相控阵天线的重要组成部分,
是相控阵天线实现其功能的基础,相控阵天线加电与断电、校准及波束扫描,均由波束控制系统进行控制。
1 波束控制原理
相控阵天线与普通阵列天线的本质差别在于前者的每个阵元或子阵都接有移相器。通过数字移相器,改变阵元或子阵的馈电电流相位,使阵列孔径形成新的等相位面,改变波束的指向,而天线本身不做机械运动。相控阵天线波束电扫的这一功能是通过波束控制系统实现的。
根据阵列天线理论,相邻两个单元之间接收的信号存在由于路程差引起的相位差:
φ=2πDsinθ/λ
(1)
式中:D为两个天线单元之间的距离;λ为信号的波长;θ为波束方向与两个天线单元垂直平面之间的夹角。
反言之,控制相邻单元之间的馈电相位差,就可控制天线波束最大点方向,也就可以实现波束扫描。
平面阵示意图如图1所示。平面阵位于YOZ平面上,在给定的离轴角θ和旋转角φ方向上,设某天线阵元的坐标为(dy,dz),雷达辐射波长为λ,则该阵元相对坐标原点的物理空间相位差为
ψ(dy,dz)=k(dysinθcosφ+dzsinθsinφ)
(2)
其中,k=2π/λ。
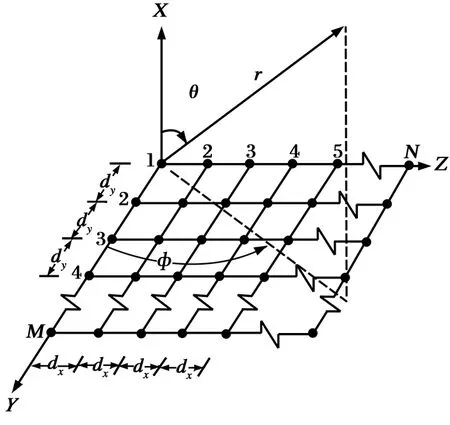
图1 天线阵面位于YOZ面
相控阵天线最核心的组成部分是一个个T/R组件,一般来说,每个T/R组件内均有一个移相器和衰减器,这正是波束扫描的执行部件。
2 波束控制系统实现
波束控制系统的基本任务,就是在规定的时间内根据天线波束指向要求解算出波控码,将波控码发送到每个对应的T/R组件内,并在同步信号的控制下同步进行幅相配置。另外,在维护状态下,波束控制系统需能够对整个阵面每个T/R组件的状态进行判故、检测等。
根据波控码在不同部分设备上的计算并结合其分布方式,波束控制系统一般有以下四种实现方式:直接查表法、子阵并行运算法、主机集中运算法和多级混合运算法。根据天线应用背景和结构空间约束条件,文中波控系统采用主机集中运算方案。
波控系统原理框图如图2所示,主要由外部控制设备、波控主机及阵面波控设备组成。
2.1 外部控制设备
在该系统中,外部控制设备为控制计算机,通过SPI接口发送角度扫描信息给波控主机,同时,控制计算机还传送相关控制信号和同步信号,以控制相控阵天线工作状态。
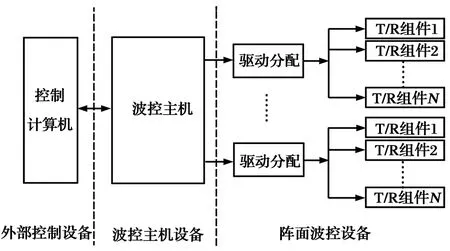
图2 波控系统原理框图
2.2 波控主机设备
波控主机完成角度扫描信息接收及波控码解算,并通过多条串行总线发送波控码到阵面波控设备。另外,波控主机还需要完成同步信号处理、天线校准控制及校准数据处理等工作。
2.2.1 波控系统方案
由于相控阵天线T/R组件数量多,决定了波束控制系统具有运算量大、实时性强、接口信号数量多等主要特点。传统DSP芯片受制于串行执行架构,很难满足系统实时性要求,而现场可编程门阵列FPGA恰好具有速度快、接口丰富、可并行计算等独特优势,同时其所有功能都可通过硬件编程语言HDL实现,重构性好,技术风险远比ASIC小,因此利用FPGA芯片作为波束控制系统的处理核心是最为合适的选择。
波控主机系统框图如图3所示。波控主机以一片高性能FPGA作为核心处理芯片,外围器件包括一片FPGA配置芯片、一片FLASH芯片,以及多片电平转换及驱动接口芯片。

图3 波控主机系统框图
波控主机通过高速串行通信接口接收来自控制计算机的角度控制信息,两个波段角度控制信息可以完全不同,包含在同一个信息帧中。高速串行信号经接口芯片转换后,由FPGA完成对角度控制信息的解码、波控数据计算以及驱动分发。为尽可能减少信号线数量,同时加快波控数据传输速度,波束控制系统使用多条高速串行总线,每条总线只负责传输一定数量天线单元(T/R组件)对应的波控数据,多条串行总线可以同时传输波控数据。
另外,作为一个实用的相控阵天线波束控制系统,同步信号的处理也是必不可少的。同步信号不但包含用于使波控数据生效的波控同步信号,还包括控制每个天线单元(T/R组件)接收与发射工作状态的控制信号。外部同步信号经接口芯片转换后进入波控FPGA,在FPGA内部可以分成多组,经驱动芯片分发到每个T/R组件。
波控FLASH芯片用于存储两个波段的校准数据、天线单元坐标数据等。由FPGA形成相关控制逻辑,可以实现把外部高速串行接口送入的数据存入FLASH芯片中。为实现波控数据高速解算,FLASH中存储的天线校准数据、坐标数据可以在产品上电后自动加载到FPGA片内存储区中,在工作中直接从FPGA片内存储区中取数。
2.2.2 波控码解算
波控数据解码及发送均在FPGA芯片内实现,波控数据形成及发送框图如图4所示。由图可见,在FPGA内部实现了波控数据解算及分发模块。外部角度控制信息到达后,同时送入四个波控数据解算及分发模块,四个模块并行处理并进行数据分发。对于每个外部角度控制信息,首先利用天线单元坐标信息计算得到空间相位差矩阵,然后与通道校准数据合成,得到相位数据矩阵,接着与幅度加权数据合成,得到最终波束控制数据。这样得到的波控数据再分成多个组,每个组的波控数据使用一条高速串行总线发送到受控的T/R组件。波控数据解码中用到的天线单元坐标信息、通道校准数据以及幅度加权数据均存储在片外FLASH芯片中,上电后把这些数据搬移到波控FPGA片内存储器中。为满足并行运算需求,这些数据按照波段转存在片内不同存储区域中。
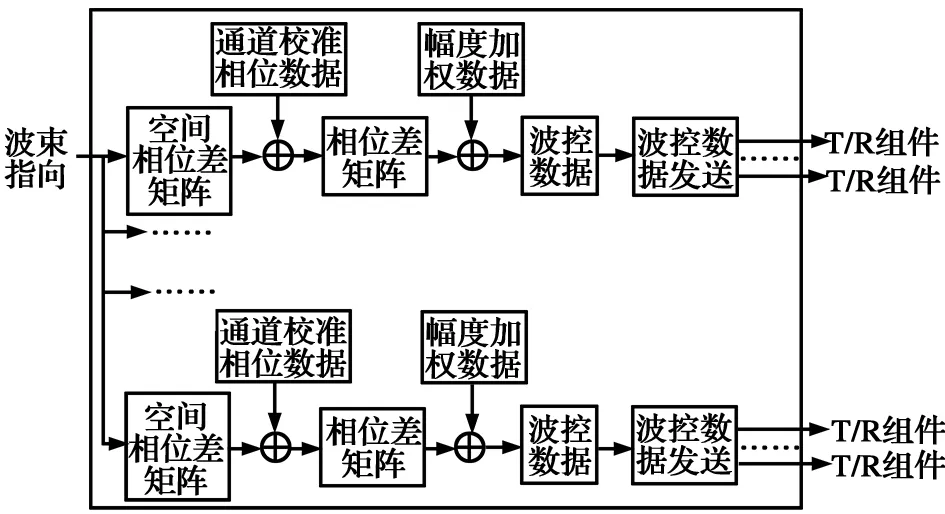
图4 波控数据形成及发送框图
2.2.3 波控码发送
波控码传输时间是波控响应时间的重要影响因素,为缩短波控码传输时间,波控系统采用多条高速串行总线,各总线并行传输波控码,从而降低了波控码传输时间。
一条SPI总线波控码发送时序图如图5所示。多个T/R组件连接在一条SPI总线上,总线先后输出多组数据,伴随地址的切换。阵面波控设备对地址进行译码,每次选择一个T/R组件接收对应的波控码。当一条SPI总线完成波控码发送后,其他总线也完成了波控码发送,间隔一定时间,波控主机输出READY信号,使前面发送的波控码生效。
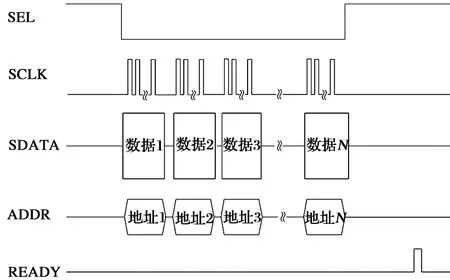
图5 天线波控码发送时序
2.3 阵面波控设备
阵面波控设备则由多个驱动分配器和T/R组件组成。
一方面,驱动分配器对地址进行译码,每次选择一个T/R组件接收对应的波控码; 另一方面,驱动分配器对通信信号、控制信号和地址译码信号进行驱动和分配,把这些信号连接到一个个T/R组件上。
在天线实现中,多个T/R组件组成一个子阵,每个子阵的T/R组件连接到同一条SPI总线上。各个T/R组件接收各自对应的波控码,在同步信号到达时使波控码生效,从而完成相控阵天线的波数扫描。
3 仿真与测试
3.1 仿真验证
为验证波束控制系统解算出的波控幅相码是否正确,采用以下仿真验证方案:编写同样算法的MATLAB仿真程序,将仿真程序运算结果与波束控制系统输出的数据进行比对,两者采用同样的设计输入,包括天线单元坐标、校准数据以及扫描角度信息(本文中为θ=10,φ=20)。波束控制系统解算出的波控幅相码数据获取方法是使用FPGA在线仿真工具Chipscope,采集FPGA解算后得到的所有阵元的幅相码数据,这样得到的数据与MATLAB仿真程序计算结果对比如图6所示。
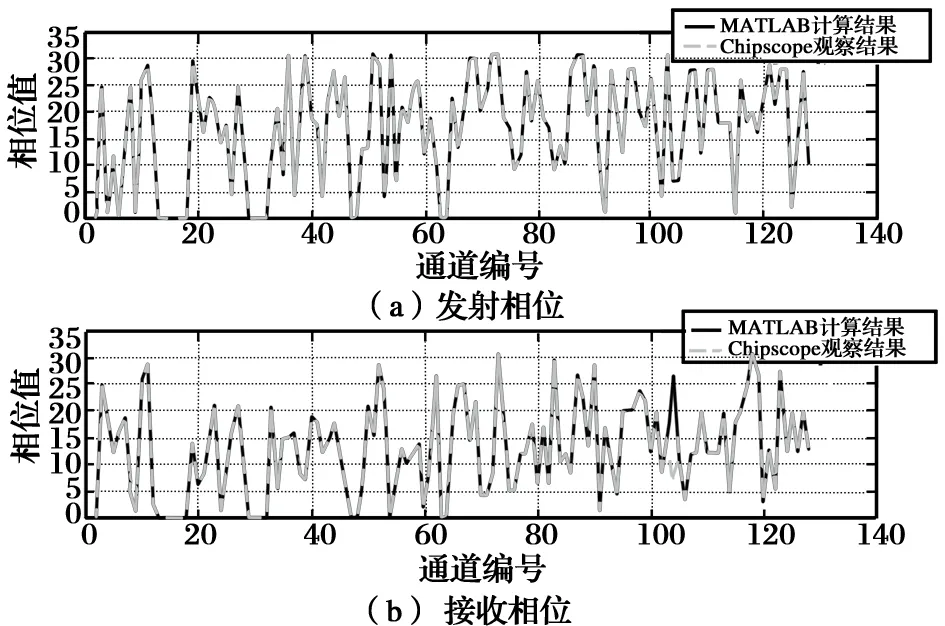
图6 波控系统相位解算与仿真结果对比
图6给出了部分通道的相位码数据,由图可以看出波束控制系统解算结果的正确性,个别通道相位计算结果与仿真结果不一致主要由波束控制系统解算舍入误差带来。
3.2 实验室测试验证
为验证波束控制系统功能和性能,该波束控制系统装配到相控阵天线,在暗室测得的方向图如图7所示。

图7 天线方向图测试结果
图中给出了0°,±30°和±60°下的方向图,可以看出,天线能够根据波束控制系统改变波束指向,且在0°指向角度下方向图副瓣约为-17 dB(相对峰值),已接近理论仿真结果。
经仿真和波束控制系统相关信号测试以及天线测试,该波束控制系统波控响应时间约为80 μs,满足天线系统波束控制的实时性要求。
4 结 论
设计的波束控制系统结合弹载应用条件,采用主机集中运算方案,充分利用FPGA的并行处理特点,进行并行运算和并行数据传输,从而压缩了波控码解算和波控码数据传输时间,达到了弹载相控阵天线应用的实时性要求。系统采用串行通信结合地址总线方式实现波控码传输,一套地址总线连接到多个子阵,从而减少了需要的控制信号数量,便利了波控系统信号走线及结构设计,使得该波束控制系统能够在弹载条件下顺利安装和可靠工作。该波束控制系统采用6位数字移相器,结合虚位技术的应用和合理的天线设计,使波束指向精度和方向图均接近理想结果。
该弹载相控阵天线波束控制系统具有控制信号数量少、控制精度高、系统响应时间短等特点,能够满足弹载相控阵天线的应用要求。
[1] 张光义,赵玉洁. 相控阵雷达技术[M]. 北京:电子工业出版社, 2006.
[2] 陈荣虎. 相控阵天线波束控制技术研究及仿真[J]. 电子工程, 2008(4):5-13.
[3] 郑清,张健.相控阵雷达分布式波控系统设计[J]. 现代雷达, 2001(S1):49-51.
[4] 廖昌明. 有源相控阵雷达波束控制系统的设计[J]. 现代雷达, 2000,22(3):7-10.
[5] 张宇驰. 基于FPGA平台的波控系统设计[D]. 南京:南京理工大学, 2012.
[6] 吕大鑫. 舰载相控阵雷达波控技术研究与实现[D]. 哈尔滨:哈尔滨工程大学, 2007.
[7] 李祥荣. 毫米波有源相控阵雷达波束控制系统的设计与应用[J]. 电讯技术,2009,49(1):77-80.
Design on Beam Steering System of Phased Array Antenna Used on Missile
Yao Zhiwen
(China Airborne Missile Academy,Luoyang 471009,China)
This article describes the design and realizing technology of a phased-array antenna beam steering system used on missile.By adopting the centralized computing scheme, the system realizes parallel computing and data transmition via reasonable bus allocation and the parallel processing ability of FPGA.The simulation and experiment results show that the system used on missile is real-time and stable which can meet the demand of controlling phased-array antenna.
phased array antenna; T/R module; beam steering control; field programmable logic gate array
10.19297/j.cnki.41-1228/tj.2016.06.003
2016-09-14
姚志文(1973-),男,河南南阳人,硕士,高级工程师,研究方向为雷达信号处理。
TH133; TP183
A
1673-5048(2016)06-0012-04
猜你喜欢
信息通信技术(2022年2期)2022-05-31
煤气与热力(2021年3期)2021-06-09
家庭影院技术(2021年3期)2021-05-21
现代信息科技(2021年21期)2021-05-07
成都信息工程大学学报(2021年6期)2021-02-12
航天工业管理(2020年9期)2020-12-28
数字海洋与水下攻防(2020年6期)2020-12-25
舰船科学技术(2020年3期)2020-04-22
科技传播(2019年22期)2020-01-14
电子制作(2019年24期)2019-02-23