
一种改进的微电网并联逆变器下垂控制策略
2016-02-06 11:50李山,叶鹏
沈阳工程学院学报(自然科学版) 2016年4期
李 山,叶 鹏
(沈阳工程学院 电力学院,辽宁 沈阳 110136)
一种改进的微电网并联逆变器下垂控制策略
李 山,叶 鹏
(沈阳工程学院 电力学院,辽宁 沈阳 110136)
针对虚拟阻抗的引入会导致微电网逆变器输出电压跌落的问题,提出了一种改进的微电网并联逆变器下垂控制策略。首先,通过对基于感性虚拟阻抗的逆变器控制系统闭环传递函数以及感性虚拟阻抗变化对闭环传递函数影响进行频域响应曲线分析,说明了改进下垂控制方法的必要性。其次,通过下垂曲线分析提出基于虚拟阻抗电压反馈的改进下垂控制策略。最后,通过Matlab/Simulink进行仿真验证,结果表明:所提出的改进下垂控制策略不但可以解决逆变器输出电压降落的问题,而且提高了下垂控制的功率分配精度,维持了系统电压和频率的稳定,证明了所提出的改进下垂控制策略的有效性。
微电网;下垂控制;虚拟阻抗;电压跌落
随着全球能源互联战略[1]的提出,微电网因具有微型、清洁、自治、灵活等特点[2]而备受人们的青睐。大力发展微电网事业将是我国未来电力能源战略的重点。分布式电源都需经过逆变器并入交流微电网系统,因此,逆变器能否稳定运行将直接影响微电网系统的稳定性和可靠性。
微电网逆变器控制一般采用主从控制[3]以及对等控制[4-5]等方法。有关主从控制法已经得到广泛的研究,然而由于主从控制法自身的缺陷,使其在应用上有一定的局限性[7];对等控制一般以下垂控制为代表,因为以下垂控制为基础的逆变器并联技术由于降低了对通讯可靠性的依赖而在微电网中得到广泛的应用。文献[6]提出了基于电压电流双环控制的下垂控制方法,并通过仿真证明了提出控制策略的可行性。文献[7-8]在文献[6]的基础上提出引进感性虚拟阻抗来改进电压电流双环控制策略,仿真结果表明通过引入感性虚拟阻抗可以减少系统环流;但是文献[7-9]中未分析虚拟阻抗的引入导致的逆变器输出电压跌落问题;文献[10]针对低压微电网提出引入反馈感性阻抗的电压电流双环的下垂控制方法,并通过仿真证明了该控制策略的有效性和正确性,但同样没有分析虚拟阻抗的引入导致逆变器输出电压跌落及虚拟阻抗的变化对电压跌落严重性的影响。
针对虚拟阻抗的引入会导致微电网逆变器输出电压跌落的问题,提出了一种改进的微电网并联逆变器下垂控制策略。首先,通过对基于感性虚拟阻抗的逆变器控制系统闭环传递函数以及感性虚拟阻抗变化对闭环传递函数影响进行频域响应曲线分析。其次,通过下垂曲线分析提出基于虚拟阻抗电压反馈的改进下垂控制策略。最后,通过Matlab/Simulink进行仿真,仿真结果表明,提出的改进的下垂控制策略不但可以解决逆变器输出电压降落问题,而且可以提高下垂控制的功率分配精度,维持了系统电压和频率的稳定,证明了提出的改进下垂控制策略的有效性。
1 微电网结构
以2台逆变器并联运行为例,由分布式电源构成的独立微电网的结构如图1所示。独立低压微电网的结构由2个分布式电源、采用下垂控制策略的逆变器单元、LC滤波器、逆变器输出阻抗以及负荷组成。其中,K1、K2、K3为隔离开关,主要用来控制分布式发电单元以及负荷的投切。在实际的研究中,为了简化研究对象,可将逆变器直流侧的分布式电源等效为直流恒压源。
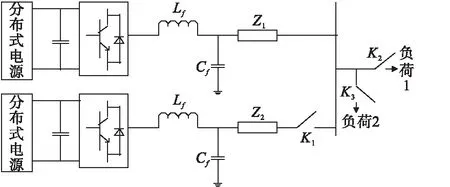
图1 独立微电网结构
2 感性虚拟阻抗的逆变器控制策略
独立微电网中基于感性虚拟阻抗的下垂控制策略框图如图2所示。独立微电网下垂控制策略工作过程如下:采集逆变器中输出的经LfCf滤波的三相电压、电流,通过Park变换后利用功率计算模块和下垂控制模块计算出参考电压的角频率和电压幅值,两者通过电压合成得到下垂控制电压;然后,将下垂控制生成的电压及反馈信号由电压外环PI及电流内环P控制,随后将经过双环控制后的信号经过PWM模块生成PWM调制信号来控制逆变器的导通和关断。
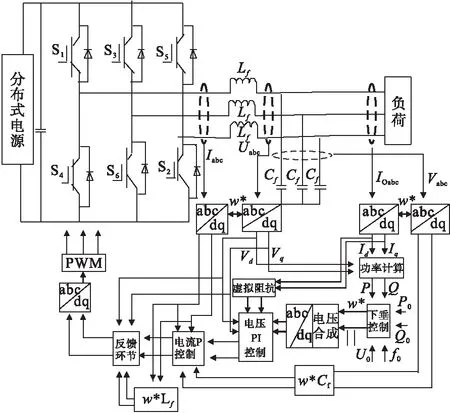
图2 基于虚拟阻抗的下垂控制策略
2.1 下垂控制原理及特性
以2台逆变器并联为例,分析下垂控制的原理。逆变器并联系统的等效电路图如图3所示。

图3 逆变器并联系统的等效电路
根据分析可知,逆变器输出功率分别为:

(1)

(2)
1)当独立微电网逆变器输出阻抗与线路阻抗之和呈感性时,公式(1)和公式(2)可化简为:
(3)
(4)
由公式可知,可以通过调节有功功率大小来调节输出角频率,进而实现对独立微电网频率的控制;通过调节无功功率来实现独立微电网电压幅值的控制。
2)当独立微电网逆变器并联,系统输出阻抗和线路阻抗之和呈阻性时,公式(1)和公式(2)可以化简为:
(5)
(6)
由公式可知,有功功率Pi主要与逆变器输出的电压幅值Ei有关,而无功功率Qi主要与逆变器输出电压相角差θi有关。
一般情况下,传统微电网逆变器输出阻抗和线路阻抗之和呈阻感性。因此,若利用P/f-Q/V下垂控制策略进行逆变器的控制,则需在微电网独立系统中加入感性虚拟电感,使逆变器输出的阻抗和线路阻抗之和呈现感性。
基于P/f-Q/V传统下垂控制方法的下垂控制特性曲线如图4所示。
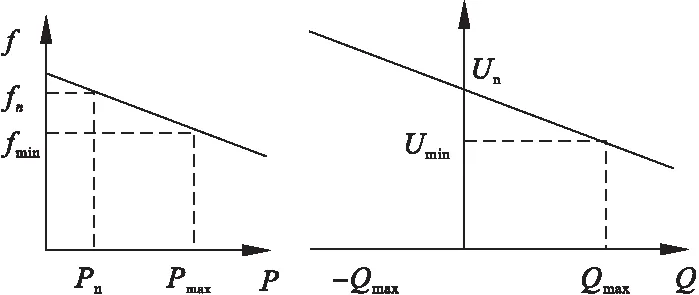
图4 基于P/f-Q/V的下垂控制特性曲线
2.2 基于感性虚拟阻抗的电压电流环控制设计
基于感性虚拟阻抗的电压电流双环的控制方案如图5所示。为提高控制系统的精度与稳定性,与传统的电压电流双环控制相比,此方案在引入感性虚拟阻抗的同时将电感电压、电容电流的反馈引入到了电压电流双环控制中,使得逆变器输出阻抗呈感性,满足P/f-Q/V下垂特性。

图5 基于虚拟阻抗的电压电流双环控制方案
由分析和计算可知,改进的电压电流双环控制的闭环传递函数如公式(7)所示。

(7)
(8)
(9)
当电压电流双环控制中引入感性虚拟阻抗时:
(10)
式中,
Z(S1)=Z(S)+Zv(S)G(S)
(11)
一般情况下,感性虚拟阻抗取Zv(S)=LvS。
基于感性虚拟阻抗的下垂控制逆变器各模块的参数取值如表1所示。
将上述参数值带入方程(8)、(9)、(11)中,可分别计算出未加感性虚拟阻抗时逆变器输出等效阻抗Z(S)和传递函数G(S)的函数表达式以及引入感性虚拟阻抗后的Z(S1)表达式。分别对G(S)、Z(S)、Z(S1)进行频域响应曲线分析,可得G(S)、Z(S)、Z(S1)的频域响应曲线如图6所示。
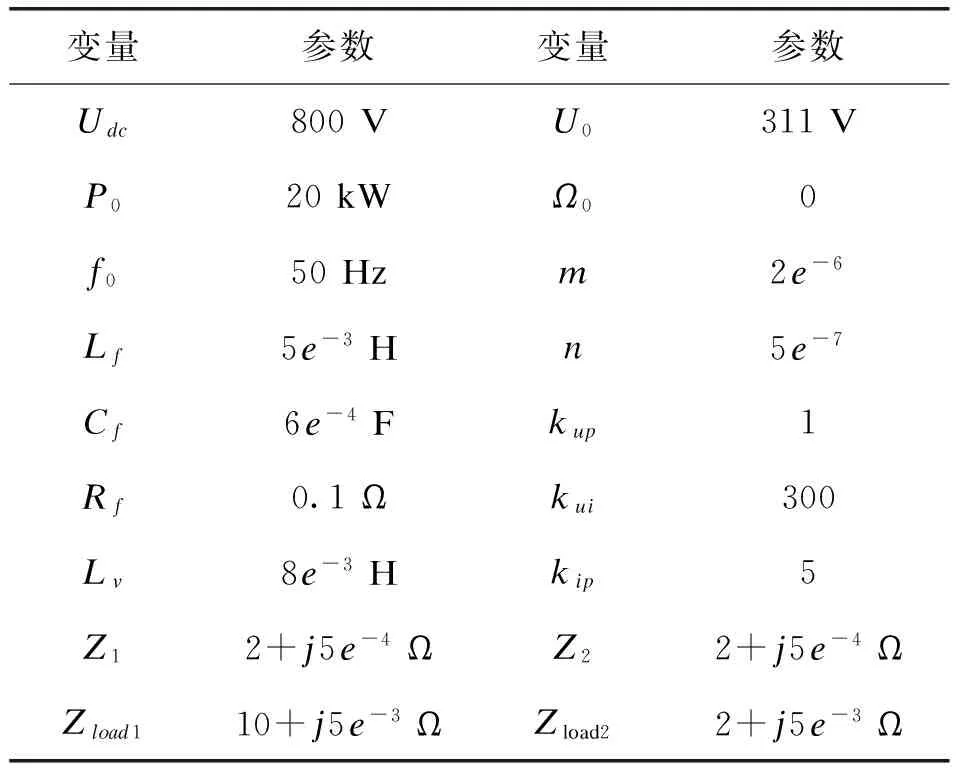
表1 系统参数值
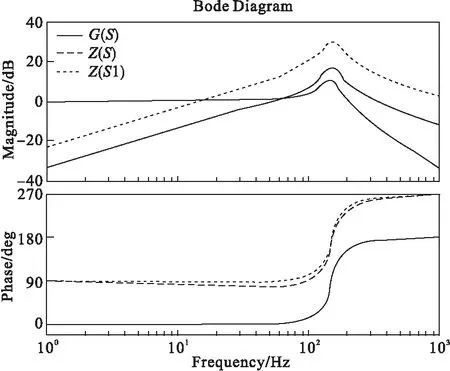
图6 函数G(S)、Z(S)、Z(S1)的频域响应曲线
如上图所示,当电压电流环控制系统中未加感性虚拟阻抗时逆变器输出的阻抗Z(S)在工频附近呈阻感性,不能满足传统P/f-Q/V下垂特性的要求;当电压电流环控制系统中加入感性虚拟阻抗后,在工频附近微电源逆变器等效输出的阻抗呈感性Z(S1),满足P/f-Q/V下垂控制策略的适用条件。
感性虚拟阻抗的引入可以提高逆变器控制系统的稳定性和无功功率的分配精度。但是在实际过程中,感性虚拟阻抗选取的过大或过小都将影响P/f-Q/V下垂控制特性曲线。感性虚拟阻抗取值不同时,Z(S1)的频域响应曲线如图7所示。
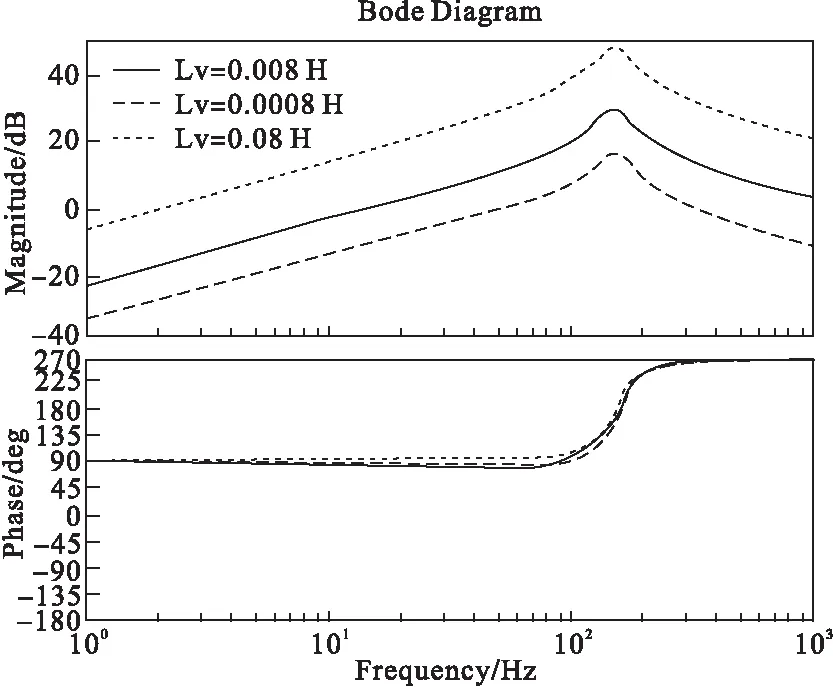
图7 感性虚拟阻抗变化时Z(S1)的频域响应曲线
如上图分析可知,感性虚拟阻抗取值不同所对应的幅值不同,导致系统电压跌落的情况也不同。因此,为了保证引入感性虚拟阻抗后逆变器输出的电压满足负荷需求,则需要对Q-V下垂控制模块进行改进。
3 基于电压跌落的Q-V改进下垂控制
为了尽可能满足P/f-Q/V下垂控制特性的要求、削弱逆变器输出阻抗的影响,以提高系统无功功率的分配精度,引入感性虚拟阻抗的取值应当越大越好。然而,在实际研究中,引入感性虚拟阻抗的数值过大将会导致逆变器输出电压的严重跌落。当电压电流双环控制中未加入感性虚拟阻抗时:
(12)
式中,U为Q-V下垂控制曲线特性对应的电压。当电压电流双环控制中引入感性虚拟阻抗后对应的方程如下:
(13)
加入感性虚拟阻抗前后的Q-V下垂控制特性曲线如图8所示。
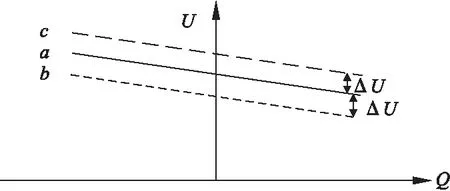
图8 引入感性虚拟阻抗前后下垂控制特性曲线的变化
如上图所示,当系统中未加入感性虚拟阻抗时,Q-V下垂控制特性曲线如a所示;当系统中加入感性虚拟阻抗后,由于感性虚拟阻抗的存在导致系统电压降落,Q-V下垂控制特性曲线如b所示,ΔU表示加入感性虚拟阻抗后系统的电压降。因此,为了保证逆变器输出电压的稳定,提高供电的可靠性,则需要通过反馈补偿环节改进Q-V下垂控制,使Q-V下垂控制特性曲线如c所示。即加入反馈补偿环节使Q-V下垂控制参考电压被合理的抬高,从而保证逆变器输出端电压不会因为感性虚拟阻抗的引入而跌落。其对应的方程如下所示:
Uref+ΔU=(U+ΔU)-LvI0=(Un+ΔU)-nQ-LvI0
(14)
根据公式(14)可知改进Q-V下垂控制的控制方案如图9所示。
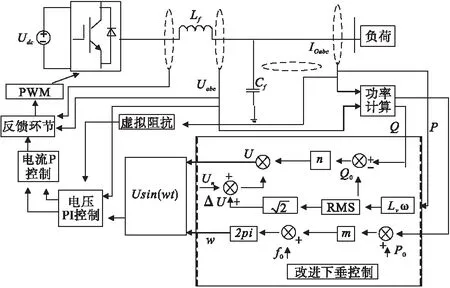
图9 改进的Q-V下垂控制方案
4 仿真验证
为了验证所提出改进下垂控制策略的正确性和有效性,通过在Matlab/Simulink仿真平台中搭建由2个分布式电源组合而成的独立微电网仿真模型,其结构模型如图1所示。仿真参数的设定如表1所示,独立微电网下垂控制及逆变器输出阻抗各参数设置相同,只有负荷1和负荷2的阻抗参数设置不同。从两种工况下对含2个分布式电源的逆变器改进下垂控制仿真进行分析。
工况1:初始时刻K1、K2、K3均闭合,在0.4 s时K3断开,系统切负荷运行,在0.6 s时K3闭合,系统接入负荷运行,在0.8 s时K2断开,系统切负荷运行。取仿真时间为1.2 s,独立微电网的运行特性如图10所示。
图10反映了在投/切负荷情况下独立微电网运行特性,其中图a、b分别反映了当负荷变化时DG1、DG2有功功率的变化和分配情况,2台分布式电源的并联逆变器参数设置相同,因此有功功率的波动变化基本相同,结合图g分析可知系统在0.4 s切负荷运行时DG1、DG2输出的有功功率减小,而DG1、DG2输出频率变大。同理,系统在0.6 s 接入负荷运行时DG1、DG2输出的有功功率增加,而DG1、DG2输出频率变小,系统在0.8 s切负荷运行时DG1、DG2输出的有功功率减小,而DG1、DG2输出频率增加,而系统输出频率的数值终保持在稳定的变化范围内(50~50.05 Hz),满足P-f下垂控制特性的要求。图c、d分别反映了当负荷变化时DG1、DG2无功功率的变化和分配情况,结合图e、f,DG1、DG2输出电压有效值的变化分析可知,系统在0.4 s切负荷运行时DG1、DG2输出的无功功率减小,而DG1、DG2输出电压有效值有小幅度的增加。同理,系统在0.6 s接入负荷运行时DG1、DG2输出的无功功率增加,而DG1、DG2输出电压有效值有小幅度的减小,系统在0.8 s切负荷运行时DG1、DG2输出的无功功率
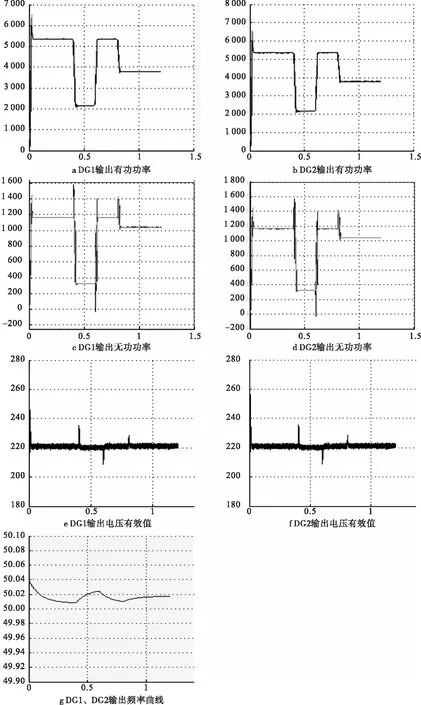
图10 投/切负荷情况下独立微电网运行特性
减小,而DG1、DG2输出电压有效值有小幅度的增加,且DG1、DG2输出电压有效值均保持在220 V左右,满足Q-V改进的下垂控制特性的要求。同时,由图a、b、c、d各逆变器输出有功功率和无功功率曲线变化可知,各分布式电源可实现负荷功率的均分,在负荷投切变化情况下能够迅速调整功率输出,快速实现系统功率分配,提高了系统功率分配精度。
工况2:初始时刻K1、K2、K3均闭合,在0.4 s时K1断开,DG2分布式电源退出系统运行,在0.6 s 时闭合,DG2分布式电源并入系统运行,在1.0 s时K1断开,DG2分布式电源退出系统运行。仿真时间为1.2 s,这种情况下独立微电网的运行特性如图11所示。
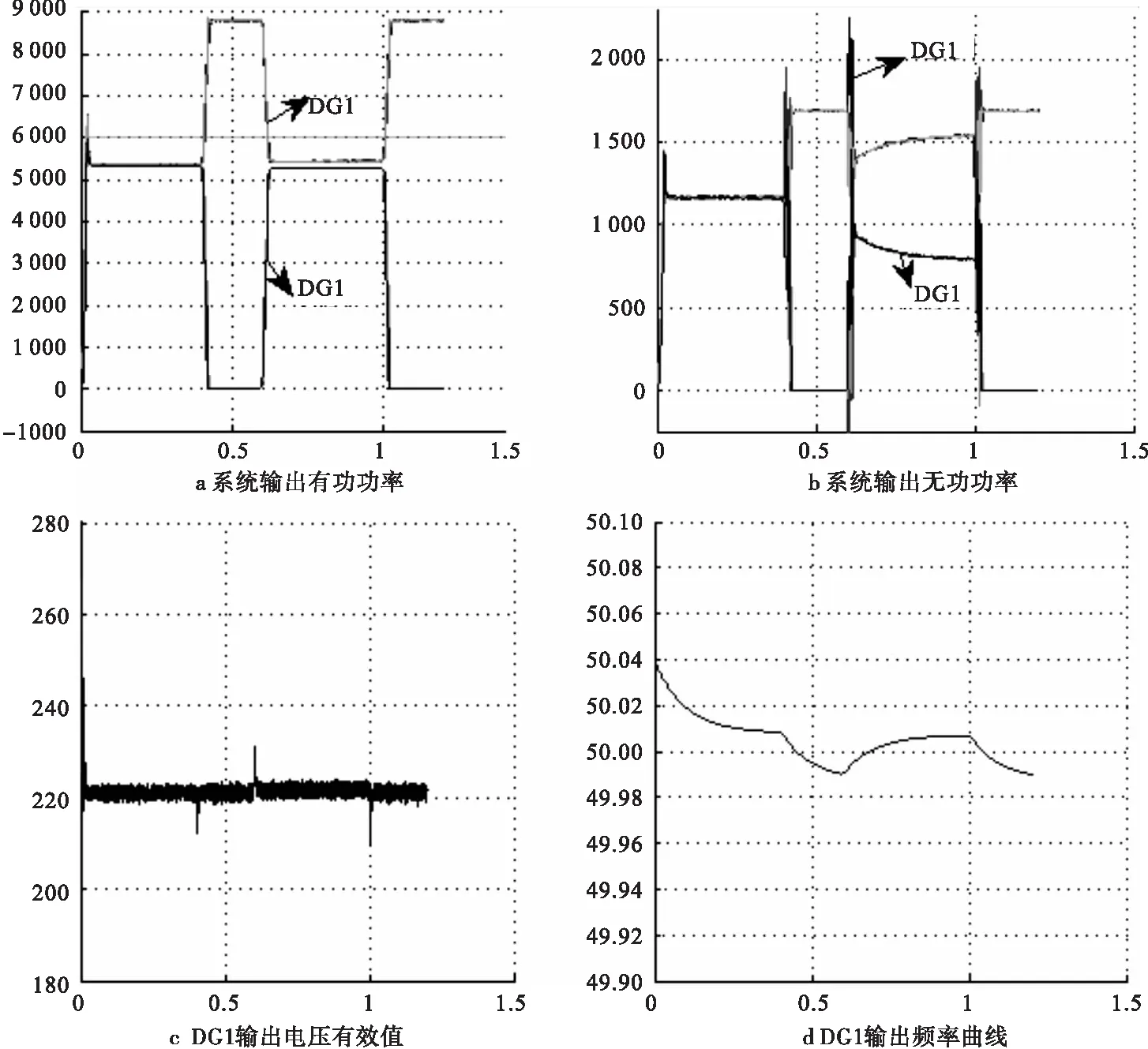
图11 DG2投/切运行时DG1独立微电网的运行特性
图11反映了DG2投/切运行时DG1独立微电网的运行特性,图a、b为分布式电源DG1、DG2输出的有功功率和无功功率曲线,分析图可知,提出的改进下垂控制策略可实现分布式电源的即插即用,但分布式电源的投/切对微网功率波动的影响不能忽略。分析图c、d可知,当DG2投/切运行时独立微电网系统的电压和频率能够保持在所要求的范围内,DG2投/切运行会导致系统的有功功率和无功功率的波动,进而使频率和电压有所波动,但是在改进的下垂控制策略下能够迅速保持稳定。
为了验证Q-V改进下垂控制策略的有效性,在工况1的运行背景下通过比较基于感性虚拟阻抗的Q-V传统下垂控制及所提出的基于感性虚拟阻抗的改进下垂策略的电压波形的变化,证明了提出的基于感性虚拟阻抗的Q-V改进下垂策略能够有效防止电压跌落,仿真波形图如图12所示。
根据以上仿真分析可知,提出了的基于感性虚拟阻抗的Q-V改进下垂控制策略,能够消除由于感性虚拟阻抗引入而导致的电压降落问题,提高了下垂控制的功率分配精度,维持了系统电压和频率的稳定。
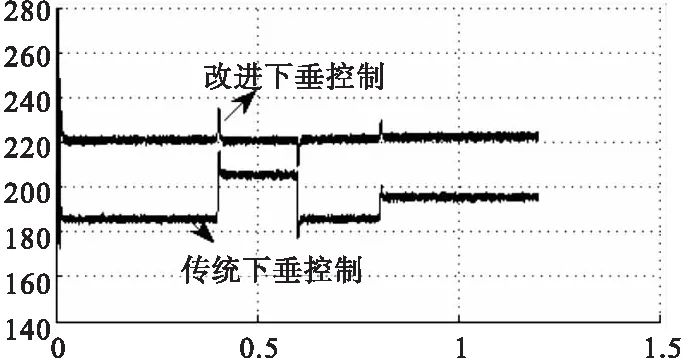
图12 基于感性虚拟阻抗的下垂电压跌落分析
5 结 语
针对传统下垂控制策略存在的不足,提出了基于感性虚拟阻抗的改进下垂控制策略。首先,通过频域法对基于感性虚拟阻抗的逆变器双环控制系统的闭环传递函数进行频域响应曲线分析,从理论上说明了提出的改进下垂控制的必要性;然后,以2台分布式电源逆变器并联为模型搭建仿真实验,仿真结果表明,提出的改进下垂控制策略能够消除由于感性虚拟阻抗引入而导致的电压降落问题,提高了下垂控制的功率分配精度,维持了系统电压和频率的稳定,从而保证独立微电网系统的供电质量。
[1]刘振亚.全球能源互联网[J].当代电力文化,2015,3(1):77-80.
[2]时珊珊,鲁宗相,周双喜,等.中国微电网的特点和发展[J].中国电力,2009,19(3):123-125.
[3]Lopes J A,Moreira C L,Madureira A G.Defining control strategies for microgrid island operation[J].IEEE Trans on power systems,2006,21(2):916-924.
[4]王成山,高 菲,李 鹏,等.低压微网控制策略研究[J].中国电机工程学报,2012,32(25):2-8.
[5]Guerrero J M,Hang Lijun,Uceda J,et al.Control of distributed uninterruptible power supply systems[J].IEEE Transactions on Industrial Applications,2008,55(8):2845-2858.
[6]王玉梅,刘 然,陈 征.基于双环控制的微电网运行控制策略的研究[J].电源技术,2012,31(10):220-224.
[7]张庆海,彭楚武,陈燕东,等.一种微电网多逆变器并联运行控制策略[J].中国电机工程学报,2012,32(25):156-158.
[8]王逸超,罗 安,金国彬,等.大连线阻抗环境下的微电网逆变器并联运行控制策略[J].中国电机工程学报,2015,35(4):79-81.
[9]李小明.基于虚拟阻抗与非线性控制的微电网下垂控制优化[D].成都:西南交通大学,2015.
[10]杨 涛,赵兴勇,王 帅.基于反馈阻抗的微电网下垂控制策略[J].电网与清洁能源,2015,31(10):34-38.
[11]古阳洋,赵 毅,苗 勇.基于DIGSILENT仿真软件的微电网稳定性研究[J].沈阳工程学院学报:自然科学版,2015,11(2):146-151.
(责任编辑 佟金锴 校对 魏静敏)
An Improved Droop Control Strategy for Parallel Lnverters in Micro Grid
LI Shan,YE Peng
(Institute of Electric Power,Shenyang Institute of Engineering,Shenyang 110136,Liaoning province)
Aiming at the problem that the output voltage sag of microgrid inverter can be caused by the introduction of virtual impedance,this paper proposes an improved droop control strategy for parallel inverters in microgrid.Firstly,based on the virtual impedance control system of the closed-loop transfer function of the inverter and the change of inductive virtual impedance on the closed-loop transfer function of frequency response curve analysis,indicating that the improved droop control method is necessity.Secondly,an improved droop control strategy based on virtual impedance voltage feedback is proposed by analyzing the droop curve.Lastly,the Matlab/Simulink simulation results show that the improved droop control strategy can not only solve the output voltage sag of the inverters,but also improve the accuracy of power allocation of droop control,maintain the system voltage and frequency stability.It is proved that the improved droop control strategy is effective.
Microgrid; Droop control; Virtual impedance; Voltage sag
2016-06-20
沈阳市科技项目(F16-205-1-08)
李 山(1989-),男,河南南阳人,硕士研究生。
叶 鹏(1974-),男,吉林吉林人,教授,博士,硕士生导师,主要从事电力系统运行与控制方面的研究。
10.13888/j.cnki.jsie(ns).2016.04.001
TM743
A
1673-1603(2016)04-0289-08
猜你喜欢
山东纺织经济(2021年5期)2021-08-13
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
新闻传播(2016年9期)2016-09-26
公民与法治(2016年24期)2016-05-17
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
化工进展(2015年6期)2015-11-13
当代教育论坛(2015年4期)2015-11-08
中国医疗美容(2015年5期)2015-02-03
