
港珠澳大桥沉管隧道深基槽开挖典型施工分析
2016-02-02 13:07陈东
山东工业技术 2016年22期
陈 东
(中交广州航道局有限公司,广州 510221)
港珠澳大桥沉管隧道深基槽开挖典型施工分析
陈 东
(中交广州航道局有限公司,广州 510221)
港珠澳大桥横跨珠江口海域,沉管隧道基槽基本与水流垂直,基槽开挖具有断面复杂、水流急,挖深大的特点,基槽最大开挖深度达48m,最大开挖泥层厚度约30m。施工过程中,为确保基槽开挖的平整度,需根据管节分段、纵坡、土质、水深、季节等因素布置了多个原位典型施工。本文通过分析在水深大于40m以上及土质为粘土、砂的施工工况下,抓斗挖泥船“金雄”轮的船舶适应性及施工质量,为深基槽段精挖施工及类似工程提供参考。
港珠澳大桥;隧道基槽;抓斗船;金雄;精挖
1 工程概况
港珠澳大桥岛隧工程,起于粤港分界线(K5+972.454),沿23DY 锚地北侧向西,穿越珠江口铜鼓航道、伶仃西航道,止于西人工岛结合部非通航孔桥西端(K13+413),全长7440.546m。

图1 港珠澳大桥平面布置示意图
沉管隧道基槽长5664m,底宽41.95m,底标高-16.3~-48.5m;横向按1:2.5、1:3、1:5、1:7等不同坡比放坡,纵向采用3.098%、2.996%、1.613%、1.49%、0.3%等多种坡率组合,呈W 型布置,相对于一般为平底的疏浚工程,施工难度极大。
隧道基槽开挖分粗挖和精挖,粗挖为基槽底面以上2m处至海床面之间的部分,精挖为剩余部分。为确保基槽精挖质量,保证基础稳定性,需根据管节分段、纵坡、土质、水深、季节等因素布置了多个原位典型施工。(见图2)
2 典型施工区域
根据项目进度要求,计划2012年7月上旬开始E11-E15管节段精挖作业,此施工区域为本工程隧道基槽最大水深开挖段,土质为粘土、砂。为此,项目部选取精挖典型施工范围为:K10+843.00~K10+803.00,全长40m,宽度为51.95m,纵坡比为0.77%。根据纵坡变化以及船舶特性我们将该区域分为2条条形区域,每条条形区域宽为20m,开挖厚度为1m。

图2 沉管隧道基槽纵向剖面图

图3 施工平面图
3 精挖典型施工简介
3.1 施工设备
本次典型施工设备为抓斗挖泥船“金雄”轮,总长68m,型宽25m,挖泥时吃水2.8m,斗容30m³,斗臂长28m,挖泥半径14.9~21.4m,最大挖深75m。

图4 “金雄”轮施工示意图
3.2 施工过程
2012年6月28日,“金雄”轮开始进行E11管节精挖典型施工。
精挖典型施工时间:2012年6月28日~29日;
精挖典型施工面积为: 51.95m×20m×2=2078m2;
精挖开挖范围及高程:K10+843.00~K10+823.00段开挖底标高为44.01m,K10+823.00~K10+803.00开挖底标高为44.16m(1985国家高程基准,下同);
水深检测:精挖完成后立即对精挖典型施工区域进行多波束测量;
平面控制:采用双RTK接收器和船用姿态传感器实现船舶的平面及姿态控制;
高程控制:利用挖泥船抓斗垂直方向上的桁架位置安放RTK接收器实现高程控制。
3.3 施工工艺简述
施工前将拟开挖区域及标高形成电子导航文件输入船舶DDS系统。
(1)船舶根据导航文件实现就位,实时接收RTK信号进行挖泥操作。
(2)为了避免漏挖现象的发生,抓斗船排斗时,条与条之间搭接宽度为1米。同时,相邻斗之间搭接宽度为1/3的斗长或斗宽,如图5所示。

图5 “金雄”轮精挖平面布置图
(3)施工过程中DDS系统自动实现对开挖过程的轨迹及施工数据记录。
(4)完成开挖后对施工区域进行检测。
(5)根据检测数据进行分析,与原始施工数据记录进行比对,进行施工工艺定型。
4 测试结果及数据处理
4.1 挖泥船锚固系统的稳定性
参考潮汐预测表,以选取潮差较大的时段进行稳定性测试,本次测试日期为2012年6月28日,当日最大潮位发生在下午13:00左右,在13:00~20:30时间段为退潮时段,潮差约为1.65m。选取潮流流速最大的时段,进行RTK-GPS的平面点位信号采集,信号采集间隔为30s,共采集了435个点,测试“金雄”轮的锚固系统的稳定性,平面点位见图6。
根据采集的RTK-GPS平面点位数据信号可知,X坐标中误差为0.424m,Y坐标中误差为0.236m。表明该船在最大流速时,能保证船体稳定,符合精挖要求。
4.2 定深平挖系统性能测试
4.2.1 开挖高程图
精挖施工后的进行多波束水深检测,得到水深图如图7:

图6 RTK-GPS平面点位图
图7 精挖典型施工高程图
施工高程图的高程数据按不同颜色进行区分,划分原则:根据岛隧工程隧道基槽精挖的质量要求,基槽槽底标高允许偏差为-60cm~+40cm,偏差范围介于-85cm~-60cm和+40cm~ +65cm的测点数量不超过20%。。基于此原则,划分如下:
(1)偏差值介于+40cm~+65cm之间:粉色显示,表示开挖深度不足,须控制数据比例;
(2)偏差值介于-60cm~+40cm之间:绿色显示,表示在允许的超深范围内,符合设计要求;
(3)偏差值介于-85cm~-60cm之间:蓝色显示,表示开挖深度过大,须控制数据比例。
4.2.2 精挖高程的散点图

图8 精挖高程时间序列图(44.01m)
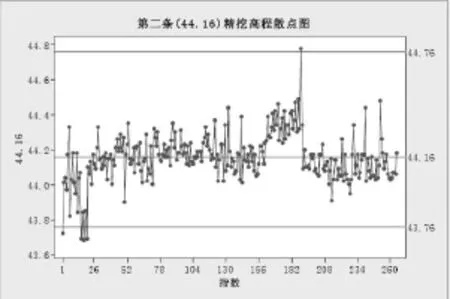
图9 精挖高程时间序列图(44.16m)
由图8可知,在269个测量数据中,绝大多数的测量数据偏差分布在-60cm~+40cm内,少量数据在+40cm~+65cm之内。
由图9可知,在265个测量数据中,绝大多数的测量数据偏差值分布在-60cm~+40cm以内,少量数据在+40cm~+65cm及-85cm~-60cm之内。
4.2.3 精挖高程的饼图
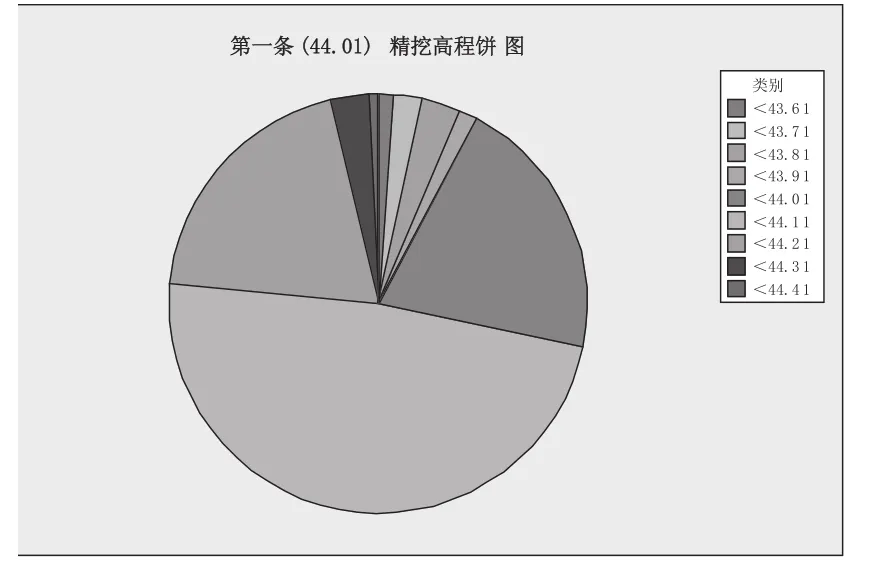
图10 精挖高程饼图(44.01m)

图11 精挖高程饼图(44.16m)
由图10可知,精挖高程满足设计要求的数据比例为100%,其中偏差值分布在-60cm~+40cm之内的数据比例为98.8%,偏差值在+40cm~+65cm之内的数据比例为1.2%。
由图11可知,精挖高程满足设计要求的数据比例为100%,其中偏差值分布在-60cm~+40cm之内的数据比例为98.1%,偏差值在+40cm~+65cm之内的数据比例为1.5%,偏差值在-85cm~-60cm之内的数据比例为0.4%。
4.2.4 质量分布图(直方图+正态分布图)
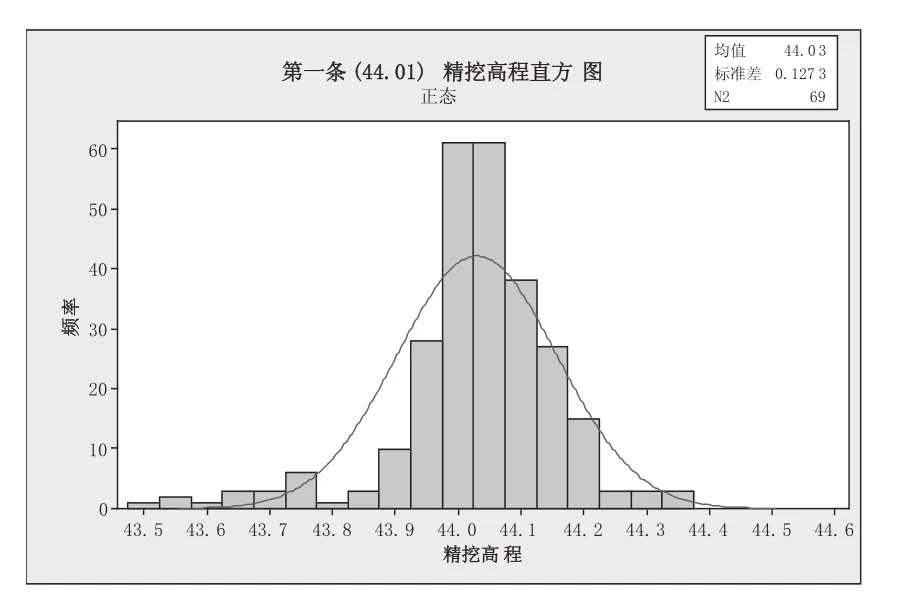
图12 水深点直方图及正态图(44.01m)

图13 水深点直方图及正态图(44.16m)
从图12、13可看出,精挖后的高程值分布较为集中,其中,精挖高程数据的σ(标准差)都非常小,分别为0.1273和0.1362,证明了“金雄”轮精挖系统开挖质量稳定,离散性小。
5 结论
(1)在潮流流速最大时,“金雄”轮的平面点位变化幅度很小,证明其锚固系统是稳定的,可满足本工程的定位精度要求。
(2)通过分析精挖后高程数据图、散点图、饼图、质量分布图可知,在外界信号稳定的条件下, “金雄”轮精挖系统比较稳定,离散性小,施工工艺可行。
综上,在水深大于40m以及土质为粘土、砂的施工工况下,按照设计开挖标高进行高程控制得到的测定结果能满足设计要求,可为本工程深基槽段精挖施工及类似工程提供参考。
[1]中交广州航道局有限公司.抓斗挖泥船高精度开挖外海深水基槽施工工法.中交广州航道局有限公司.SYGF-1-003-2012[S].
[2]中交第四航务工程勘察设计研究院有限公司.港珠澳大桥主体工程岛隧工程施工图设计第四篇隧道第二册沉管段第三分册《基础施工图(E6-S2-E23管节)》[K].2012(07).
[3]JTS257-2008,水运工程质量检验标准[S].
10.16640/j.cnki.37-1222/t.2016.22.073
陈东(1989-),男,广东广州人,助理工程师,主要从事港口与航道工程施工管理。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
商界评论(2022年1期)2022-04-13
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
学生天地(2020年6期)2020-08-25
数学大王·趣味逻辑(2019年10期)2019-11-06
草原(2018年2期)2018-03-02
消费导刊(2017年8期)2018-01-18
小学生作文选刊·中高年级版(2017年10期)2017-11-07
表面工程与再制造(2014年2期)2014-02-27
