
地铁隧道结构稳定性自动化监测系统的研究与应用
2016-01-29 05:02:35钟金宁左靖山
测绘通报 2015年9期
段 伟,王 敏,钟金宁,左靖山
(1. 南京市测绘勘察研究院有限公司,江苏 南京 210019; 2. 北京天宝富通测控技术有限公司,北京 100043)
DUAN Wei,WANG Min,ZHONG Jinning,ZUO Jingshan
地铁隧道结构稳定性自动化监测系统的研究与应用
段伟1,王敏1,钟金宁1,左靖山2
(1. 南京市测绘勘察研究院有限公司,江苏 南京 210019; 2. 北京天宝富通测控技术有限公司,北京 100043)
Application and Research of Automatic Monitoring System for Stability of Subway Tunnel Structure
DUAN Wei,WANG Min,ZHONG Jinning,ZUO Jingshan
摘要:随着城市轨道交通的快速发展,目前我国的地铁营运线路长度已近300 km,如何实时监测地铁结构的稳定性,保障地铁营运安全,受到各地政府的高度重视。本文基于高精度全站仪构建开发了地铁隧道结构安全自动化监测系统,利用VT检验法对基准点进行了稳定性判定,实现了远程无线控制全站仪对地铁结构进行自动化监测,通过三维一体化、高精度系统快速对地铁隧道进行了水平位移、垂直位移、隧道直径收敛等诸多变形量的监测,并通过试验对该系统的稳定性和监测成果精度进行了统计分析。结果表明,该系统能够满足地铁结构监测毫米级的精度要求,并具有较好的稳定性。
引文格式: 段伟,王敏,钟金宁,等. 地铁隧道结构稳定性自动化监测系统的研究与应用[J].测绘通报,2015(9):91-94.DOI:10.13474/j.cnki.11-2246.2015.0288
关键词:VT检验法;地铁隧道;结构稳定性;自动化监测
中图分类号:P258
文献标识码:B
文章编号:0494-0911(2015)09-0091-04
收稿日期:2014-12-03
基金项目:江苏省科技支撑计划(BE2014026)
作者简介:段伟(1985—),男,硕士生,工程师,主要研究方向为精密工程测量与变形监测。E-mail:306132870@qq.com
通信作者:王敏 。E-mail:endyyl@163.com
一、引言
随着我国地铁交通工程的快速发展,高精度全站仪在地铁隧道结构稳定性自动化监测中的应用已非常广泛[1-4]。地铁的变形监测精度要求高(一般要求1 mm乃至更小),而且基准点和监测点都只能布设在地铁隧道的狭长空间中,因此地面摄影测量和三维激光扫描目前还难以达到监测要求。地铁隧道内的监测点数量比较大,其变形监测过程周期性和长期性的要求,使得数据量非常庞大[5],传统通信及存储方法不便于管理如此大量的数据。此外,地铁施工位于地下,不便采用GPS技术;而精密水准测量(包括液体静力水准测量)只能作沉降监测,且费工费时,效率较低。因此,用高精度测量机器人建立地铁隧道变形自动化持续监测系统就成为最好的选择。
基于高精度全站仪的三维自动化监测系统能够实现地铁结构安全监测的实时化、自动化、智能化[6],同时可获取地铁结构在水平、垂直、直径收敛等毫米级的变形数据,满足保障地铁结构安全的需求。为此笔者基于不同品牌及精度的全站仪构建研发了地铁隧道结构安全自动化监测系统,利用VT检验法[7]在数据处理环节对基准点组进行了稳定性判定,并在南京地铁某保护区监测项目中进行了实际应用,最后对基于不同精度及品牌全站仪的监测系统稳定性及成果精度进行了对比分析。
二、自动化监测系统结构设计
基于自动化监测系统原理,笔者设计了集数据采集、传输、处理、成果发布于一体的一整套地铁隧道结构安全自动化监测系统,具体系统结构如图1所示。
1. 数据采集
在数据采集环节中,笔者基于Trimble Precision SDK平台及Leica GeoCom指令集研发了可支持Trimble S8及Leica TM30全站仪的数据采集管理平台,实现了利用远程控制全站仪进行数据的采集与管理,图2为数据采集管理平台界面。
系统主要功能有:利用远程数据采集平台控制全站仪进行点位学习、数据采集及数据库存储;远程控制全站仪开始、暂停及停止自动观测;进行各工作基点观测点组分组设定;远程设定自动观测周期;单点测量次数与重复观测时间间隔设定等。
2. 数据及指令通信
在数据及指令通信环节,笔者发明了自动化监测数据通信系统,并获得实用型新专利(专利号:ZL201120462266.X),本实用新型提供的自动化监测数据通信系统与现有技术相比具有3个方面的优点:
1) 通信方面:进来的RS485信号转换为RJ45信号,通过3G无线模块与外围服务器实现数据通信与指令传输,通信速度比GPRS有百倍的提高,减少了点组监测时间,提高了监测精度。2) 供电方面:将220 V电源转换为12 V和24 V,12 V给各模块供电,24 V给传感器供电,传感器与RTU之间用8芯网线连接,用于供电及数据通信,实现了各种模块及传感器统一供电,减少了电缆的布设,降低了成本。
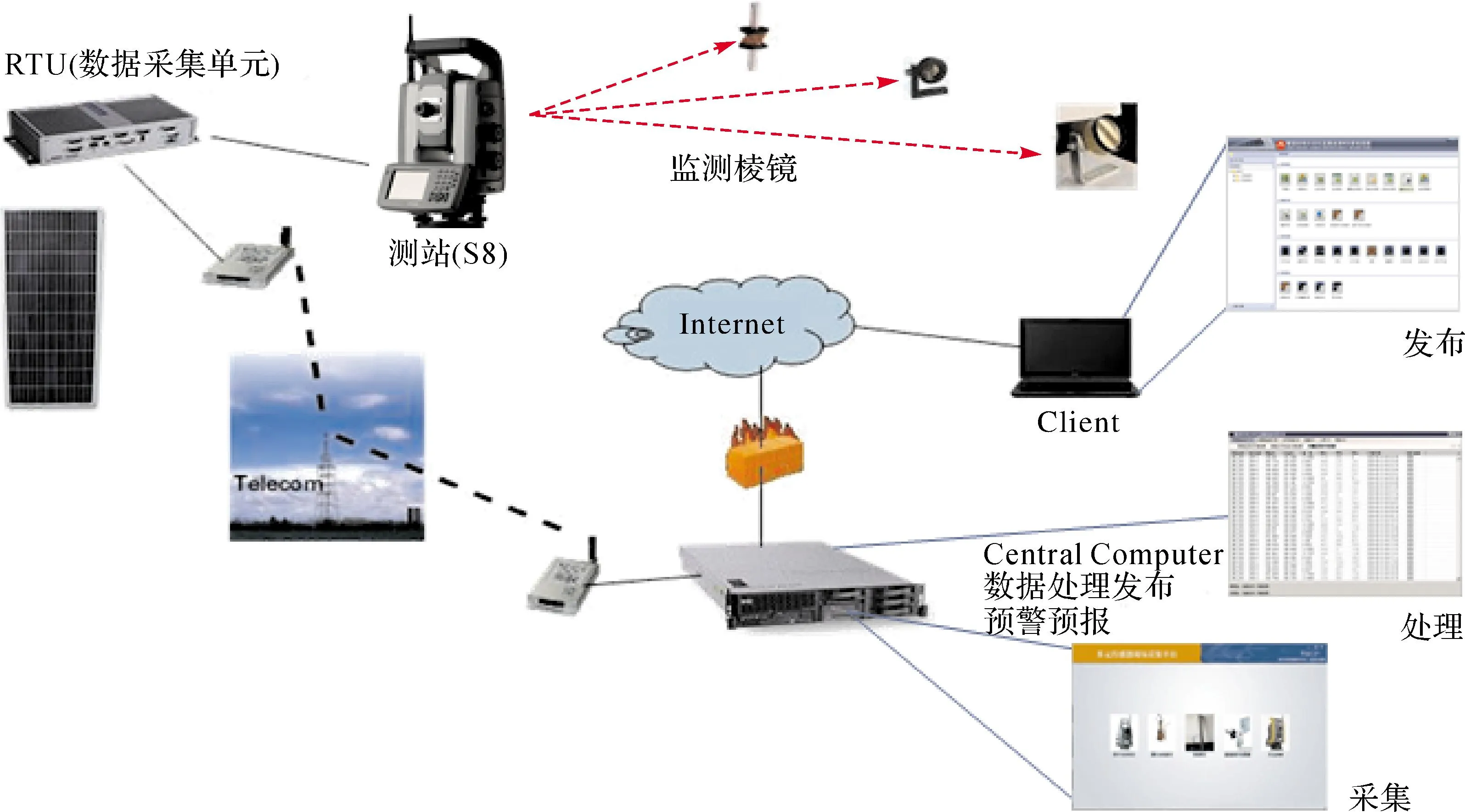
图1 地铁隧道结构安全自动化监测系统

图2 数据采集管理平台
3) 系统控制方面:采用带有单片机功能的短信控制模块及继电器组成系统的控制中心,手动或自动控制系统的开关状态,定时复位系统,提高了系统的稳定性。
3. 数据处理
基准点组稳定性判定为数据处理最重要的环节,其方法是否恰当将直接影响监测成果的精度。本文利用VT检验法在监测点成果解算前对基准点组进行稳定性判定,剔除不稳定的基准点,以提高监测点解算成果的精度。检验思路为[7]:
1) 依据自由设站所得的观测数据资料,利用全站仪空间后方交会算法计算出工作基点坐标的近似值。
The traditionaalgorithm can be improved by u(e),and the trajectory that meets the requirements of the reachability and IKPI can be searched by the improvedalgorithm.
2) 假设控制网中基准点稳定不变,采用经典平差方法进行三维平差计算,获取所有参数最或是值(包括工作基点三维坐标)。
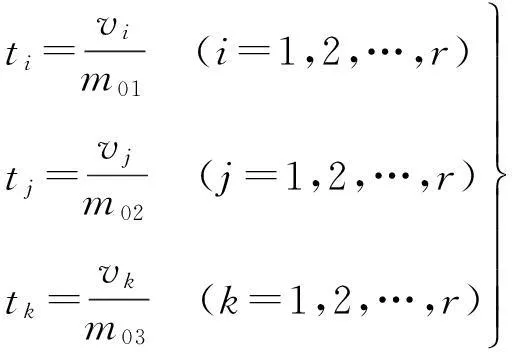
3) 利用Helmert方差估计公式,分别计算出其中3类观测值(水平方向角、天顶距、斜距)的单位权中误差m01、m02、m03。
4) 计算出3类观测值的改正数νi、νj、νk。
5) 构建3类观测值统计量t
6) 选择适当的置信水平α(本次取α=99%),计算统计量t的限差t0。

三、监测网及试验环境设置
本次试验在南京某地铁保护区监测项目区域进行,使用两台Trimble S8全站仪(0.5″一台,1″一台),采用基准点组、工作基点、监测点模式构成监测网[2],如图3所示。
监测网中,各基准点组由9个L型棱镜基准点组成;工作基点设在监测区内相对稳定、通视情况较好、结构牢固的位置,安装强制对中装置[8];监测点按10 m一个断面,每断面7个监测点(安置L型棱镜)布设,监测断面布点如图4所示。
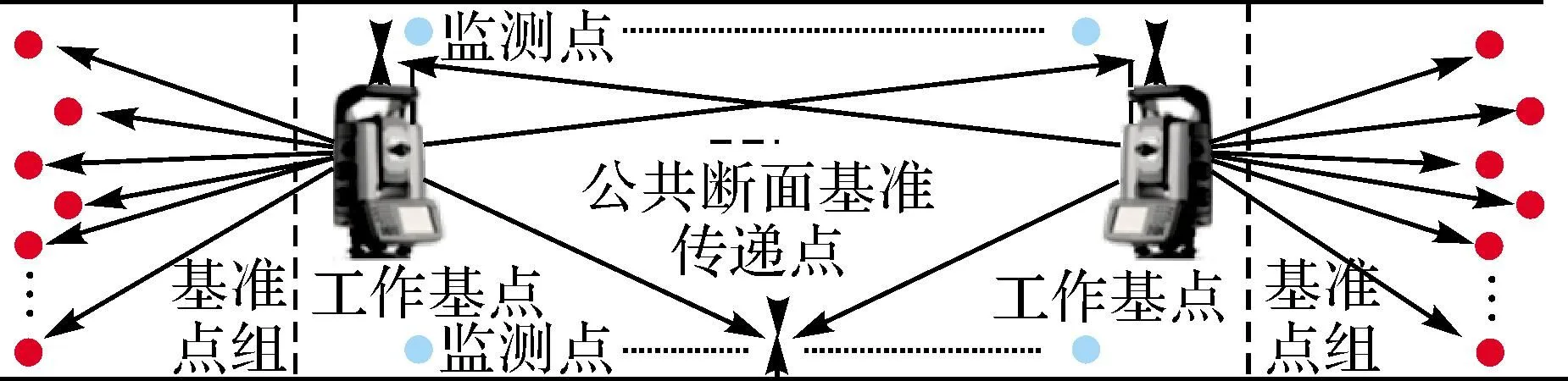
图3 变形监测网

图4 监测断面布设
通过各断面监测点的三维坐标值解算各测项值及其变化量。其中,7号点计算道床垂直位移;2号点计算水平位移;2号点和5号点计算水平收敛;4号点和6号点、4号点和7号点计算竖向收敛;3号点计算拱顶垂直位移。
为客观分析该系统的成果精度,在采用Trimble S8全站仪监测一个月后,将两个工作基点分别换上Leica TM30(0.5″),配合Leica GeoMoS软件继续监测一个月,以获取相同条件下的结构变形原始观测数据来进行对比分析。
四、系统稳定性分析
监测系统的稳定性从数据采集的成功率与采集效率两个方面进行分析。
对试验期间监测点观测原始数据进行统计,观测点组数据成功率见表1。可以看出,采用Trimble S8全站仪配合自主研发的数据采集平台,与采用Leica TM30全站仪配合GeoMoS软件每周期点组采集成功率均在96%以上,采集成功率较高。
对试验期间采集所有监测点数据的使用时间进行统计,并计算出单点单面测量使用时间(s),绘制频数分布直方图,如图5所示。
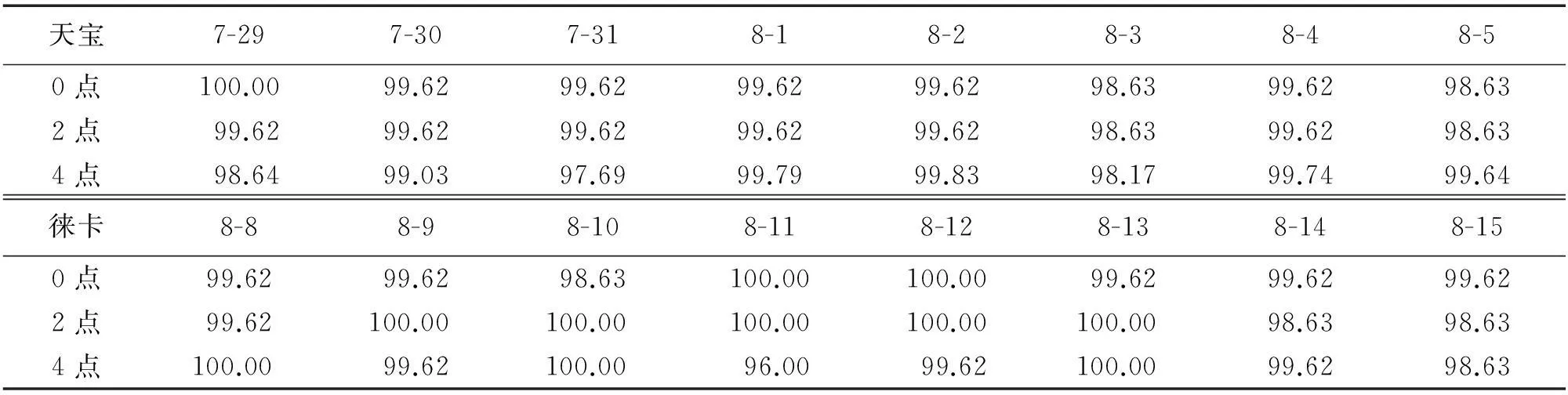
表1 监测数据成功率统计 (%)
由图5可以看出,利用不同全站仪单点测量用时为(11.5±1.5)s,置信概率为95%,采集效率差异较小。
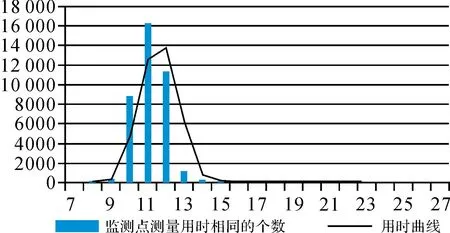
图5 单点单面数据采集时间频数分布
五、监测成果精度分析
基于试验原始观测数据,利用自主研发的三维自动化监测数据处理系统进行数据处理,解算出各周期的监测成果。
分别选取水平位移(X方向)测项、垂直位移(Z方向)测项对0.5″与1″ Trimble S8的监测点成果数据进行统计分析,计算出不同精度全站仪各监测成果精度。将采用不同精度Trimble S8的监测成果进行对比分析,以距离为横轴、中误差为纵轴作中误差随监测点到工作基点的距离变化关系的曲线图,如图6、图7所示。
由图6、图7对比结果可知,采用0.5″ Trimble S8全站仪的水平位移测量中误差区间为0.35~0.53 mm,垂直位移测量中误差区间为0.42~0.61 mm;采用1″ Trimble S8全站仪的水平位移测量中误差区间为0.36~0.57 mm,垂直位移测量中误差区间为0.31~0.68 mm;两种精度全站仪监测成果精度均比较稳定,且都能保证百米1 mm的监测精度要求;同时,水平方向上的成果精度要略高于垂直方向。
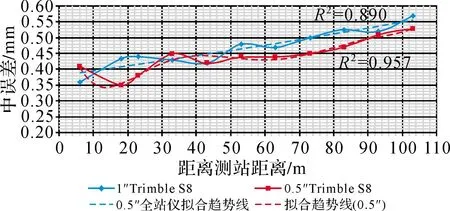
图6 0.5″与1″ Trimble S8监测点水平位移精度-距离关系

图7 0.5″与1″ Trimble S8监测点垂直位移-距离关系
为了对比分析基于Trimble全站仪的监测系统成果精度,同时对同条件下的Leica系统监测成果数据进行统计分析,计算出其监测成果精度。将0.5″ Trimble系统与0.5″ Leica系统的监测成果(选择YSZ2监测数据)精度进行对比分析,以距离为横轴、中误差为纵轴作中误差随监测点到工作基点的距离变化关系的曲线图,如图8所示。
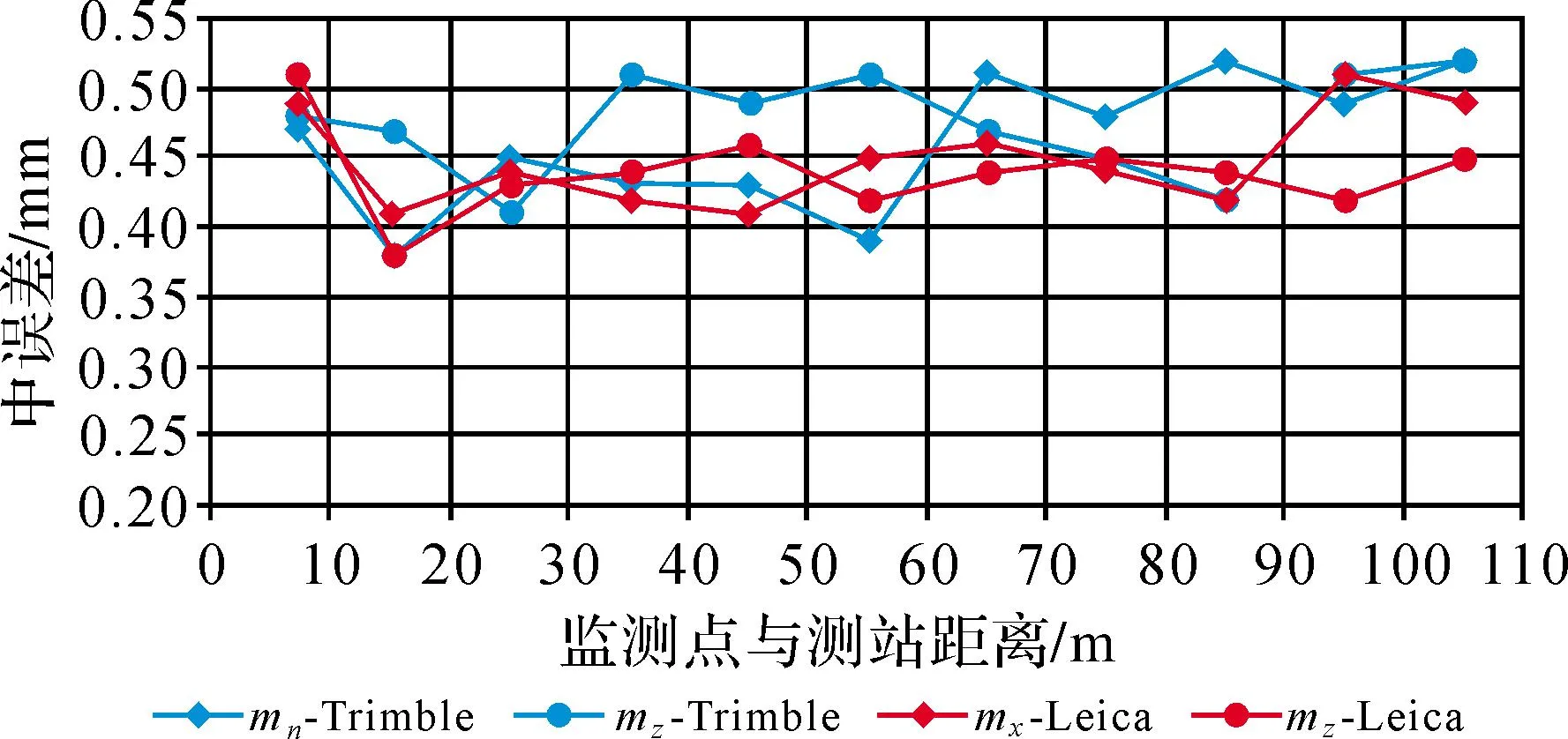
图8 Trimble、Leica监测点垂直、水平位移精度-距离关系
由对比结果可知,采用Leica监测系统的水平位移测量中误差区间为0.41~0.51 mm,垂直位移测量中误差区间为0.38~0.51 mm;采用Trimble监测系统的水平位移测量中误差区间为0.38~0.52 mm,垂直位移测量中误差区间为0.41~0.52 mm;两者监测成果精度相当。
六、结束语
本文基于不同品牌及精度的全站仪构建研发了地铁隧道结构安全自动化监测系统。在数据采集环节中研发了数据采集平台同时管理不同品牌全站仪;在数据及指令传输环节中开发了自动化监测数据通信系统,提高了数据传输效率及稳定性;在数据处理环节中应用VT检验法对基准点组进行了稳定性判定,最后通过试验对系统的稳定性和监测成果精度进行了对比分析。结果表明,基于高精度全站仪的地铁隧道自动化监测系统数据采集成功率、稳定性高,数据传输基本无延时,经过基准点组稳定性判定后监测点百米内三维成果精度优于1 mm,能够较好满足地铁结构监测在系统稳定性、成果精度、准确度等方面的需求。
参考文献:
[1]陈喜凤,黄腾,刘岭,等.GeoMoS在地铁保护区自动化监测中的应用[J].测绘工程,2013,22(2):64-69.
[2]梅文胜,张正禄,郭标明,等.测量机器人变形监测系统软件研究[J].武汉大学学报:信息科学版,2002,27(2):165-171.
[3]谷川,杨元伟.全站仪自动化变形监测系统研究与开发[J].铁道勘察,2011(5):1-4.
[4]卫建东.智能全站仪变形监测系统及其在地铁结构变形监测中的应用[D].郑州:信息工程大学,2002.
[5]岳建平,田林亚. 变形监测技术与应用[M].北京:国防工业出版社,2007.
[6]钟金宁,段伟,田有良.应用TM30进行地铁隧道变形自动化监测的研究[J].测绘通报,2011(7):85-88.
[7]段伟,储征伟,杜伟吉,等. 基于VT检验法的变形监测基准点稳定性分析[J]. 测绘通报,2014(S1):36-38.
[8]徐源,董庆金,钟金宁. 对地铁结构监测基准点稳定性的研究[J]. 现代测绘, 2012, 35(32):32-34.
猜你喜欢
煤气与热力(2022年4期)2022-05-23 12:44:56
华中建筑(2022年4期)2022-04-14 07:50:52
水利水电科技进展(2021年6期)2022-01-07 02:58:02
现代测绘(2021年1期)2021-04-28 10:19:56
北京测绘(2020年12期)2020-12-29 01:37:18
水电站设计(2020年4期)2020-07-16 08:23:48
工程与建设(2019年3期)2019-10-10 01:40:18
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
电测与仪表(2016年9期)2016-04-12 00:29:52
河南科技(2014年5期)2014-02-27 14:08:32
