
NBCORS及车载LiDAR系统POS数据处理技术在道路竣工中的应用研究
2016-01-29 05:02文学东
测绘通报 2015年9期
文学东,陈 恒
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 宁波市规划局,浙江 宁波 315042;
3. 宁波市测绘设计研究院,浙江 宁波 315042)
WEN Xuedong,CHEN Heng
NBCORS及车载LiDAR系统POS数据处理技术在道路竣工中的应用研究
文学东1,2,陈恒3
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 宁波市规划局,浙江 宁波 315042;
3. 宁波市测绘设计研究院,浙江 宁波 315042)
Road As-built Drawing Surveying Research on POS Data Processing of Vehicle-borne LiDAR System and NBCORS
WEN Xuedong,CHEN Heng
摘要:针对车载LiDAR系统在城市道路竣工测绘中所面临的问题,提出了采用城市CORS站替代单基站以差分解算POS,并通过设计试验探明了基于单基站及多基站差分GPS解算POS获得的激光点云数据精度。试验结果表明,基于测区附近3个基准站获得的点云平面精度可达4.9 cm,高程精度可达8.6 cm,能够满足城市道路竣工的精度要求,具有替代近距离单基站差分的潜力。
引文格式: 文学东,陈恒. NBCORS及车载LiDAR系统POS数据处理技术在道路竣工中的应用研究[J].测绘通报,2015(9):60-63.DOI:10.13474/j.cnki.11-2246.2015.0280
关键词:车载LiDAR系统;差分GPS;NBCORS;道路竣工测绘
中图分类号:P234.4
文献标识码:B
文章编号:0494-0911(2015)09-0060-04
收稿日期:2015-06-17
作者简介:文学东(1979—),男,博士生,主要研究方向为摄影测量、遥感图像处理和三维激光扫描测量技术。
E-mail: 553078256@qq.com
一、引言
车载LiDAR系统主要由GPS/IMU、激光扫描仪、全景相机等核心传感器构成,其中,GPS/IMU系统获取的原始数据称为POS数据。POS数据是为系统提供绝对位置及姿态的,它的精度直接决定了最终激光点云数据的精度。目前,在城市道路竣工测绘应用中,车载LiDAR系统的POS数据处理主要采用单基站差分GPS的方法,但该方法需要单独架设基站,耗时、费力;而现代城市一般都布设有CORS参考站,若能用其替代单基站,则可较大程度上降低作业成本、提高效率。
本文以NBCORS及宁波市测绘设计研究院的车载LiDAR系统为例,分别采用不同距离、不同数量的NBCORS基准站对车载LiDAR系统的POS数据进行处理,将基于该POS得到的点云数据与检核点进行比较。试验表明,采用多基站差分GPS的方法对车载LiDAR系统的POS数据进行后处理得到的点云数据,能够满足现行城市道路竣工测绘规范的要求。
二、车载LiDAR系统的组成及原理
本文以宁波市测绘设计研究院的车载激光扫描与全景成像城市测量系统(如图1所示)为例,开展基于NBCORS的车载LiDAR系统POS数据处理在道路竣工中的应用研究。该系统各核心传感器间通过机械结构保持相对位置固定,且各传感器之间的严格几何关系通过标定建立,测量过程中,各传感器均使用GPS时间系统且保持时间同步,当车载系统以一定速度移动时,组合导航系统GPS和IMU以一定的频率观测并记录系统瞬时的绝对位置和姿态数据;同时,激光扫描仪与全景相机也以一定频率扫描和采集,获得瞬时坐标系下的点云及全景影像,结合标定参数、系统绝对位置和姿态,即可得到绝对坐标系下的数据成果。

图1 车载激光扫描与全景成像城市测量系统
三、基于差分GPS的POS数据处理方法
1. GPS观测及误差
一般而言,普通的GPS接收机能够获取3种观测值:伪距、载波相位和多普勒频移。其中,载波相位观测是目前最精确的GPS观测方法,车载LiDAR系统的数据解算通常选用该类观测值。载波相位测量的基本原理是GPS接收机接收到的具有多普勒频移的载波信号,与接收机产生的参考载波信号之间的相位差。载波相位的观测值表示如下

(1)

载波相位观测值含有多种误差,按误差性质,可分为系统误差和随机误差两类。系统误差主要包括:卫星轨道误差、卫星钟差、电离层延迟、对流层延迟、接收机钟差和接收机位置误差;随机误差主要包括多路径效应误差和接收机噪声。GPS测量误差是车载LiDAR系统测量的主要误差来源。
2. 差分GPS
差分GPS解算模式是利用已知精确三维坐标的差分GPS基准站,求得伪距修正量或位置修正量,再将这个修正量实时或事后发送给固定或移动的GPS接收机,对其测量数据进行修正,从而得到更高精度GPS数据的一种方法。通过差分,可以消除或减弱一些具有系统性误差的影响,如卫星轨道误差、卫星及接收机钟差、大气折射误差等。依据基准站个数,差分GPS可分为单基准差分、多基准的局部区域差分和广域差分。
差分GPS的理论基础是流动站GPS与基准站存在空间相关性,对于单基站差分GPS而言,基准站与流动站2台接收机同步跟踪观测相同的GPS卫星,二者的空间相关性会随着距离的增加而减弱,其解算精度也会随之变差;对于多基站差分GPS,一般要求基站数量不少于3个且网形覆盖整个测区范围,由于多个基准站在测区范围内均匀分布,可精确估计对流层延迟、电离层延迟和卫星轨道误差等基准站间的空间相关误差,因而,可最大限度地消除空间误差。
3. NBCORS
CORS,又称连续运行参考站网系统,该系统一般指建立在城市或地区的永久性连续运行GNSS参考站,通过网络能够共享参考站数据。NBCORS则为在宁波市建立的CORS网,它自建了7个GNSS连续运行参考站,引入周边城市7个GNSS连续运行参考站,建成包含14个参考站的连续运行参考站网,平均间距45 km,均匀覆盖了宁波及周边地区的区域,在宁波市区域任意一点离最近NBCORS站距离不大于40 km。NBCORS参考站点分布如图2所示。

图2 NBCORS参考站分布网图
4. 车载LiDAR系统POS数据处理
在高精度的城市测绘应用中,车载LiDAR系统的原始POS数据包括基站数据及移动站数据。其中基站数据为GPS静态观测数据,供差分GPS使用;移动站数据包括GPS数据及惯导IMU数据。POS数据后处理首先需将移动站GPS数据与基站GPS数据进行差分处理,解算得到基于GPS的车载LiDAR系统轨迹;然后将GPS差分结果与惯导IMU数据进行紧耦合(tightly coupled,TC),如果采用双向紧耦合模式,需将双向紧耦合结果进行组合,并将紧耦合结果进行平滑得到最终的高精度位置与姿态数据,同理可得采用松耦合模式时的解算;最后将处理结果输出,即得到处理后的POS数据。其处理流程如图3所示。
通过解算得到的POS数据并结合激光点云标定参数,即可将车载LiDAR系统同步采集的扫描仪坐标系下的激光点云数据转换到绝对坐标系下,因而,可以用绝对坐标系下的激光点云精度间接评定车载LiDAR系统POS数据的精度。
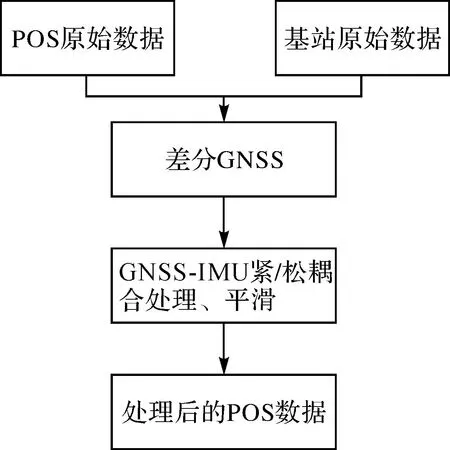
图3 基于差分GPS的POS数据处理
四、试验及分析
本文试验分两个部分,分别为单基站及多基站差分GPS解算POS数据的精度分析,试验选用测区附近的NBCORS站作为基站来完成。同时,在测区内架设单基站进行比对分析,并通过车载LiDAR系统在绝对坐标系下的激光点云数据精度来间接评定POS数据精度。
试验主要数据设备包括:1台Trimble R8 GPS接收机、3个NBCORS基准站、车载LiDAR系统。测区选在宁波市国际贸易展览中心的1号—8号楼及其周边区域,该区域为长500 m、宽400 m的近似矩形区域。试验场内部较为空旷,可保证GPS信号良好;建筑棱角分明,可保证充足的试验检核点;试验区域房屋不太高,能保证激光扫描仪扫描到房屋角点。在试验区采集数据时,卫星状况良好,数目在8~14颗之间。试验场及场内标定点示意图如图4所示。
对于单基站差分GPS试验,选用离测区最近的NBCORS基准站A、B、C分别与车载LiDAR系统的GPS数据进行差分解算,其中,基站A离测区的距离约为11.7 km、基站B为16.9 km、基站C为49.8 km,此外,为了进行比对分析,还在试验区内的已知点上架设了基准站D,其离待测区域最远点距离为560 m;对于多基站差分GPS试验,则将基站A、B、C数据同时导入进行差分解算,3个基站及测区的分布如图5所示。
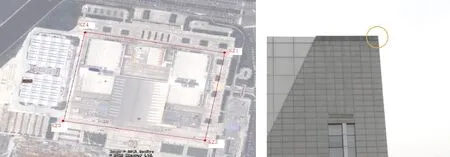
图4 试验场及场内标定点示意图
数据采集过程中,所有基站及车载GPS的采样间隔均为1 s,数据采集过程中,车载LiDAR系统以20 km/h的速度运行;数据解算时,车载GPS与基站进行差分,差分后的结果与惯导IMU数据执行紧耦合解算和光滑处理得到处理后的POS数据(轨迹图如图6所示),再结合车载LiDAR系统的标定参数,解算即可得到绝对坐标系下的激光点云数据,然后,利用检核点即可评定点云精度,进而间接评定POS数据精度。
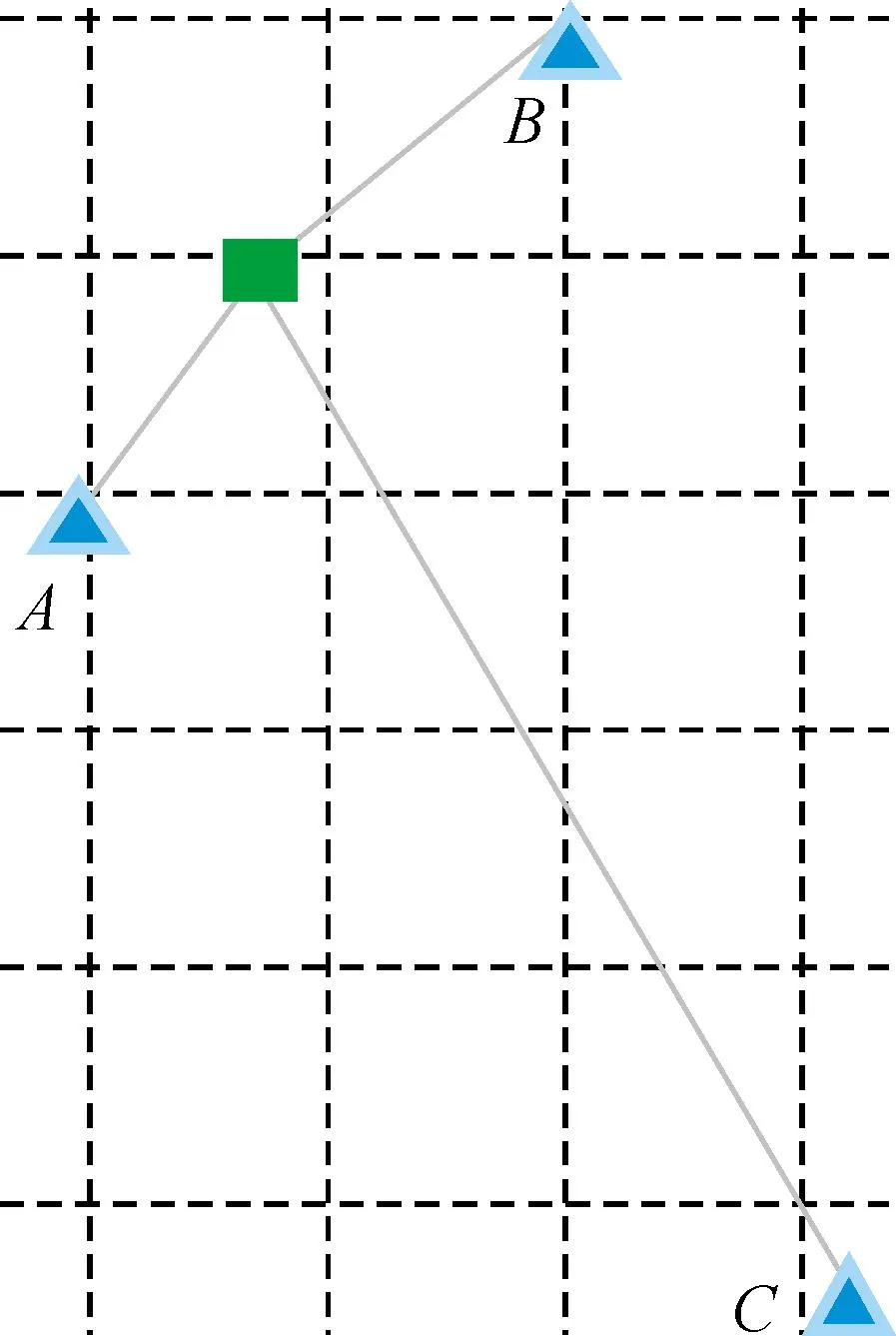
图5 测区及附近的3个NBCORS基准站分布(三角符号表示基准站,矩形符号表示测区)
选取试验区31个检核点,并在对应的激光点云数据中采集对应点的平面及高程数据,检定结果见表1。
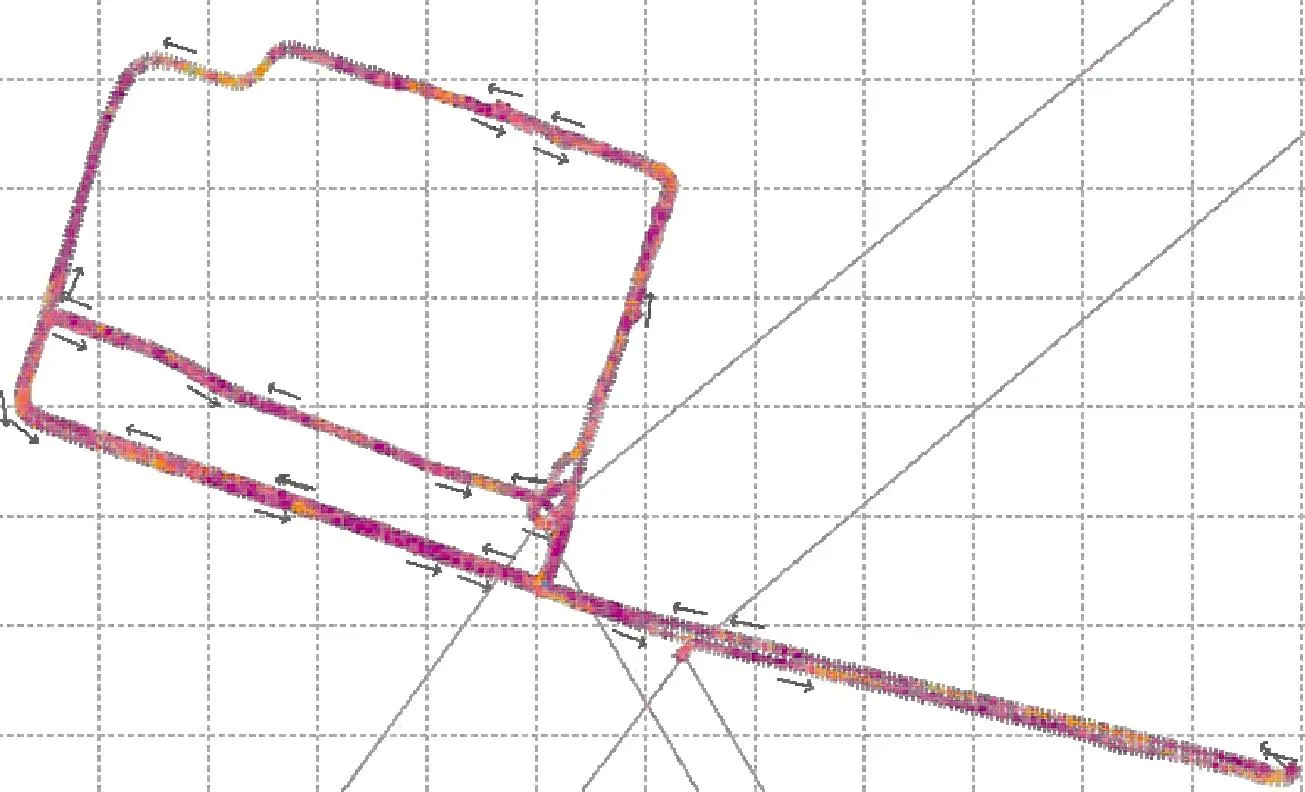
图6 POS数据处理试验的轨迹

m
车载LiDAR系统在GNSS信号良好的情况下,可得出如下结论:从表1中单基站及多基站差分解算POS获得的点云数据精度来看,点云数据的平面中误差在0.049~0.108 m之间波动,高程中误差则在0.055~0.108 m之间波动,平面及高程精度均满足浙江省道路竣工的测量精度要求,因此,可考虑采用测区最邻近3个NBCORS站替代单基站,从而达到节省费用、提高工作效率的目的。
五、结束语
本文以宁波市车载LiDAR系统为例,介绍了车载LiDAR系统的组成、工作原理,从单基站差分、多基站差分两种POS数据处理方法出发,通过设计试验探明了两种方式对应的激光点云数据的测量精度,从而证明了在城市道路竣工测绘应用中,基于NBCORS的远距离多基站差分技术具有替代近距离单基站差分的潜力,可为车载LiDAR系统在该类项目中的应用提供参考。
参考文献:
[1]邹晓亮. 车载测量系统数据处理若干关键技术研究[D]. 郑州:信息工程大学,2011.
[2]韩友美,杨伯刚. 车载LiDAR技术市政道路测量高程精度控制[J]. 测绘通报,2013(S2):18-21,35.
[3]陈为民. 基于全景成像与激光扫描的城市快速三维测量与重建技术研究[D]. 武汉:武汉大学,2012.
[4]杨伯刚,韩友美. 车载移动激光扫描技术大比例尺测图技术分析[J]. 测绘科学,38(1):106-108.
[5]王万峰. MMS综合测量精度分析与应用研究[D]. 北京:北京建筑工程学院,2009.
[6]邹勇平. POS辅助航空摄影测量应用方法研究与误差分析[D]. 西安:西安电子科技大学,2010.
[7]刘硕. 基于POS系统的航空摄影测量试验研究[D]. 昆明:昆明理工大学,2010.
[8]李德仁. 移动测量技术及其应用[J]. 地理空间信息,2006,4(4):1-5.
[9]刘经南,张小红,李征航. 影像机载激光扫描测高精度的系统误差分析[J]. 武汉大学学报:信息科学版,2002,27(2):111-117.
[10]付建红,赵双明.基于像底点的机载POS视准轴误差检校[J].测绘学报, 2011,40 (5):610-615.
[11]黄先锋,李卉,江万寿,等. 机载激光扫描数据误差分析与精度改善研究进展[J]. 遥感信息,2007(3):91-95.
