
命令模式下的智能UUV模型设计
2016-01-27 07:41李宏宏康凤举
系统仿真技术 2015年3期
关键词:命令
李宏宏, 康凤举
(1.西北工业大学航海学院,陕西 西安 710072; 2.水下信息处理与控制国家重点实验室,陕西 西安 710072)
命令模式下的智能UUV模型设计
李宏宏1,2, 康凤举1,2
(1.西北工业大学航海学院,陕西 西安710072; 2.水下信息处理与控制国家重点实验室,陕西 西安710072)
摘要:多智能UUV编队作战时,接收到上级的命令后,应以上级命令为中心根据环境信息采取行动完成任务。通常的Agent模式以个体意识为中心,不适合这种以命令为中心的UUV建模。本文结合近年来Agent理论的研究成果,通过对军事作战中命令体制的研究,提出一种基于命令的Agent模型组织结构,给出了该模型的形式化语言描述,并构建了基于命令机制的智能UUV模型,实现了基于MAS的多UUV机群作战仿真系统。为构建基于MAS的水下网络中心战系统提供技术支撑。
关键词:命令; UUV; Agent组织模型; 作战仿真
1引言
基于MAS的多UUV作战机群接收航母或潜艇的指令,完成指定的任务。在这个过程中UUV个体应以接收到的命令为中心,根据环境信息采取最优方案完成上级任务。目前对智能Agent的主体结构研究主要有慎思型,反应型和混合结构主体。纯粹的慎思型和反应型都不是结构主体的最佳选择,以BDI为基础的混合结构主体以个体意识为中心[1],并不适应于描述这种智能UUV作战机群。针对混合型结构的缺点,德国Fischer,Muller和Pischel将反应、慎思和协作能力结合起来,研制了一种混合式结构InteRRap[2]。在军事领域,文[3]对智能舰艇编队指挥控制系统进行了研究,但是还仅限于在原BDI结构上加入作战等级标识来描述实体等级特点,并不能从根本上解决命令与个体意识的冲突。文[4]针对政府和军事领域的强制性对基于使命的Agent组织模型进行了初步探索。
本文通过对军事作战中命令体制的研究,抽取作战体系中的命令指令形成命令集,代替BDI结构中的意图集,构成一种新的基于命令的Agent模型组织结构,并给出了该模型的描述语言ABL的定义和语义解释,构建了基于命令的智能UUV模型,实现了基于MAS的多UUV机群作战仿真系统。
2命令模式Agent 模型的提出
在军事作战中,存在着明确的层级关系,各层级完成各自的任务使命。上级给下级下达命令,下级需要严格执行上级命令[5]。传统的BDI结构Agent以个体意识为中心,并不适合这种以上级命令为中心的模式。在BDI结构中意图主要描述主体打算达到的一组目标。主体根据环境信息实时改变自身的意图集[6]。在UUV作战机群中,UUV要达到的目标往往由上级下达,因此本文利用命令集代替意图集,弱化个体意识强化上级命令,提出由信念-命令-愿望组成的更适合军事作战使用的新BCD模型。并在此基础上加入能力、承诺、角色等心智因素,建立UUV的智能模型,如图1所示。
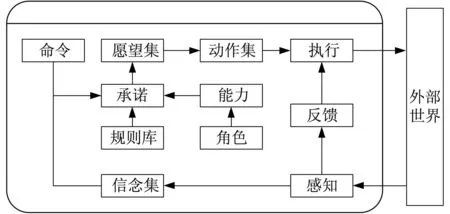
图1 Agent BCD模型Fig.1 Agent BCD model
BCD模型由信念、愿望、命令(含社会义务)、能力、承诺、角色等组成。信念包括环境、自身及群体中其他Agent的状态信息;命令包括Agent接收到的命令、应尽的义务和Agent根据环境形成的意图;能力包括Agent个体可执行的动作;愿望包括Agent对所选择目标的承诺;角色包括Agent在团体中的层级关系,决定能力集的组成;承诺是依据信念、目标和能力应用承诺规则产生愿望;承诺规则是Agent做出承诺的形式依据;规划是依据愿望和能力产生动作序列。
3BCD模型逻辑
3.1ABL语法
为了描述Agent的BCD模型,本文首先给出Agent BCD模型描述语言ABL[7]。
ABL以谓词逻辑为基础,引入时态算子,动作算子以及描述心智状态BCD算子。其中时态算子包括:L( 上一次)、N(下一次)、P(曾经)、F(将会)、H(总有)、G(总会);动作算子包括:ACHIEVED、DONE;模态算子包括:BEL(信念)、DES(愿望)、COM(命令)、CAP(能力)等。针对ABL在此给出以下几个定义:
定义1:ABL语言(简记为La)构成如下:
(1) 个体常项:c1,c2,c3……;
(2) 个体变项:x1,x2,x3……;
(3) 谓词符号:P1,P2,P3……;
(4) 命题连接符:﹁,→,∨,∧,∣,“;”;
(5) 心智模态词:BEL,DES,COM,CAP;
(6) 动作词:ACHIEVED,DONE
(7) 时态模态词:L,N,P,F,H,G;
(8) 存在量词:∀,∃;
(9) 括号:()。
﹁、∨、∧与常规定义相同,→表示因果关系,P→Q表示如果P则Q。∣连接两个选择执行的动作,“;”连接两个顺序执行的动作。ACHIEVED(φ,p,φ’)表示在前提状态φ下完成p的执行,达到目标状态φ’;DONE(φ,p)表示在前提状态φ下完成p的执行;CMD(i,j,α)表示Agenti向Agentj下达命令执行行为α。CAP(i,α)= 1 的含义:Agenti有执行行为α的能力。
定义2:La的公式定义如下:
(1) 每个原子公式是La的公式;
(2) 若φ和∂是La的公式,则﹁φ,(∂∨φ),∀xφ,∃xφ和X(φ)都是La的公式,其中X 为定义1中给出的任一模态词。
(3) 只有通过上述1)和2)得到的非空符号串才是L a的公式。
3.2AML语义与公理
ABL的语义模型由八元组M=(S,T,φ,π,B,DE,C,N)构成,其中S 为状态集;T是随时间变化的状态序列,T中的元素为状态序列,用来反映状态随时间的变化情况;φ为基本事件类型集合;π是指定与事件相关的Agent。B⊆T×Z×T为信念的可达关系;DE⊆T×Z×T为愿望的可达关系;N⊆T×Z×T为能力的可达关系;C⊆T×Z×T为命令的可达关系。Z代表离散数学中的Z变换。
在此定义真值指派函数π为:

设变量指派V→φ。函数i用于解释个体词,当τ为常量时,i(τ)=C(τ),当τ为变量时,i(τ)=V(τ)。ABL公式的语义解释为:








UUV承诺模块根据承诺规则产生愿望,初始规则由ABL公理和规则构成,UUV在运行过程中可通过学习产生ABL定理加入承诺机制。因此承诺规则构成如下:
A1CMD(φ)∧BEL(φ)∧CAP(φ)→DES(φ)
A2CMD(φ)→BEL(φ)
A3DES(N(φ))→N(φ)
A4DES(φ)→BEL(DES(φ))
A5L(φ)→BEL(L(φ))
A6CMD(φ)→F(-CMD(φ))
A7CAP(φ)→BEL(φ)
A8CMD(φ)→CAP(φ)
A9CAP(φ)→BEL(CAP(φ))
A10CMD(φ)→CAP(CMD(φ))
A11DES(φ)→CAP(DES(φ))
A12G(φ→φ)→(G(φ)→G(φ))
A13H(φ→φ)→(H(φ)→H(φ))
A14L(φ)→P(φ)
φ→H(F(φ))
φ→G(P(φ))
A17F(φ)→G(P(φ)∨φ∨F(φ))
A18P(φ)→G(P(φ))
A19F(φ)→F(F(φ))
A20F(φ)→H(F(φ))
X(∀xφ)→∀xX(φ)
∀xX(φ)→X(∀xφ)
∃xX(φ)→X(∃xφ)
4BCD UUV的设计实现
开发基于BCD模型的多UUV智能编队作战仿真系统。设计实现基于BCD模型的Agent智能个体,实现了基于命令机制的智能UUV模型,完成了多UUV系统仿真。
4.1BCD UUV模型总体结构
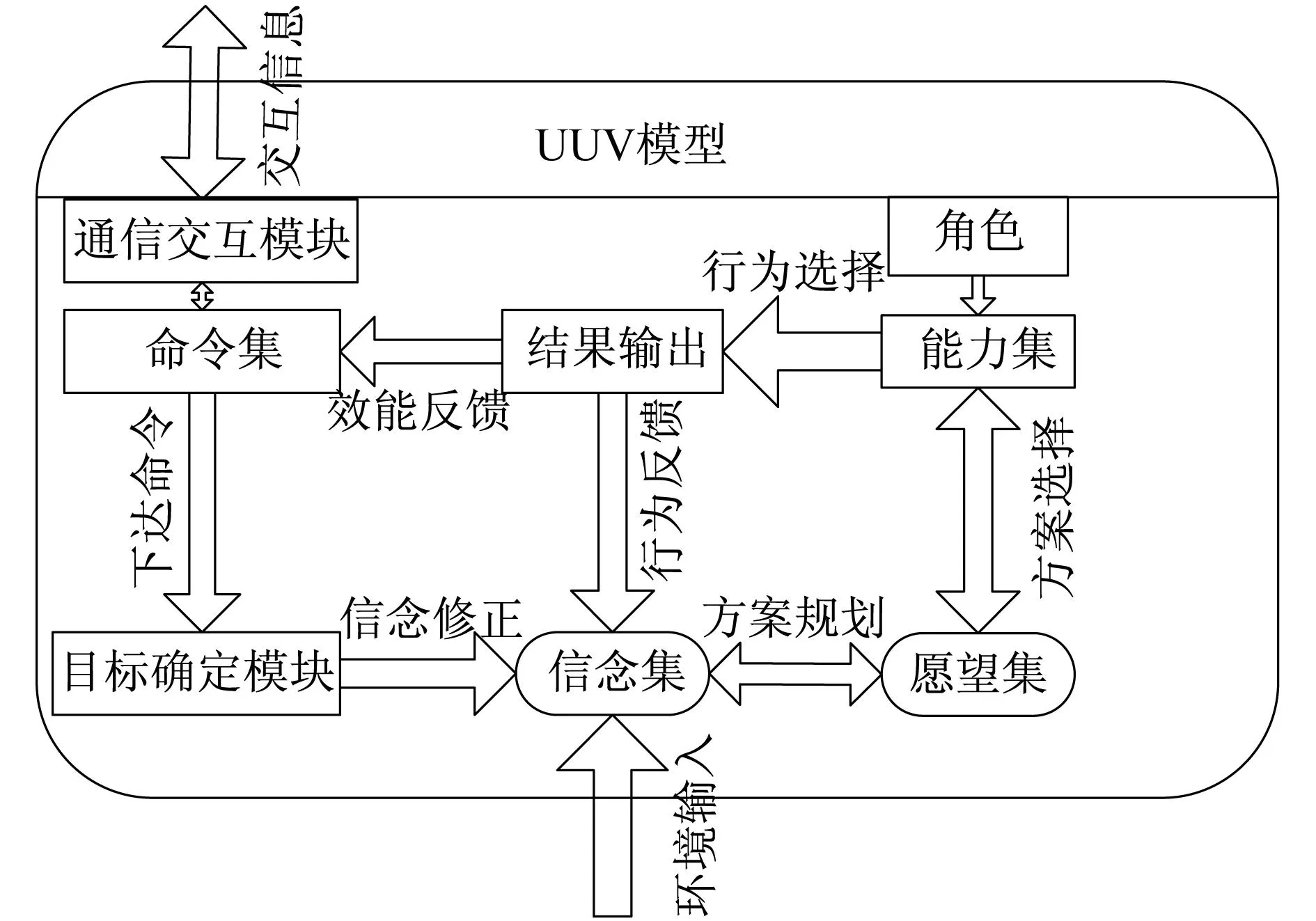
图2 UUV模型结构Fig.2 UUV model composition
BCDUUV结构的主要组成成分如下:
(1) 通信交互模块负责命令、信息的接收和状态信息的反馈通信。实时接收来自其他Agent发送的交互信息,并将自己的某些状态实时反馈出去。
(2) 命令集存储来自上级Agent的命令及完成情况,在群体中应尽的义务、遵守的规则等信息。还具备分析命令信任程度的能力和根据命令完成情况实时调整目标。
(3) 目标确定模块根据命令集中给定的命令确定精确可实施目标。
(4) 信念集存放环境信息、其他Agent信息和自身信息。并根据这类信息推理出实现目标的若干种方案。
(5) 愿望集存放个体利益愿望规则,接受信念集发送来的方案,根据个体愿望选择最佳方案。并将方案的接受程度实时反馈给信念集及时修正信念集。
(6) 能力集存放个体的能实现的行为能力,由个体角色决定。接收来自愿望集中的实施方案,根据自己能实现的能力确定执行步骤,分析完成效能,结果输出。
(7) 结果输出执行能力集中的行为。并将目标完成情况实时反馈给命令集和信念集,以供后续行为参考。
4.2UUV主体模型
为了使UUV主体模型具备Agent特点,为其设计一个软件框架。根据BCD Agent的结构分析,只有感知和执行部分是相对固定的,思考部分随着上级命令的不同而改变,所以为了符合其结构特点,软件框架中只能实现感知和执行部分的功能,思考部分必须作为接口留给独立模块根据具体命令来处理。这样的软件框架需要具备自维持能力。
该软件框架需要具备以下特性:自主感知和自成思考体系,其中自主感知是智能UUV特性中的重要一点,也是区别于普通UUV的一个重要标志。UUV必须具备自主感知能力,才能主动探索外界环境,实现自身的判断。自成思考体系也是智能UUV特性中的重要一点,UUV必须能够在生存期间自主观察、自主思考和行动。
(1) UUV主体模型可以通过下列要素描述:
(a) 一组关于世界的信念;
(b) 主体当前打算达到的一组目标
(c) 一个规则库,描述怎样完成命令和改变信念;
(d) 一个命令库,描述主体接收到的命令和自身的个体意识。
(2) 在此给出一个简单的解释器,如下所示:
BCD-Interpreter
Initialize-state();
do
options:=option-generator(event-queue,B,C,N);
selected-option:=deliberate(options,B,N,C);
update-desires(selected-options,D);
execute(D);
get-external-events();
drop-successful-attitudes(B,C,N);
drop-impossible-attitudes(B,G,N);
until quit
4.3UUV运行过程
UUV运行主要是由上级命令驱动,而不是由环境的刺激激发,充分体现以上级命令为中心的特性。UUV运行过程如下:
(1) 初始待命状态;
(2) 感知模块实时感知环境信息更新信念集。对某些紧急情况利用反射机制直接做出行动反应。
(3) 接受上级命令,分析命令建立目标;
(4) 根据环境信息,能力集和目标利用承诺规则产生愿望;
(5) 若愿望集不为空,根据能力集规划出执行方案;
(6) 行为评估,更新承诺规则和能力库,并将任务完成效能反馈给上级;转到3)。
5仿真实验
在此基于VC++ 2003.net开发环境开发了一个基于BCD模型的多UUV智能编队作战仿真系统。设计实现了基于BCD模型的Agent智能个体,实现了基于命令机制的智能UUV模型,实现了基于MAS的多UUV机群作战仿真系统。为构建基于MAS的水下网络中心战系统提供技术支撑,完成了多UUV系统仿真。系统结构如图3所示。
该系统由二维态势节点,航迹图绘制,仿真时钟和9个UUV节点组成。各节点之间通过TCP/IP协议进行通信。其中二维态势节点从整体上展示编队的运行状况,航迹图节点实时绘制每个UUV的运动轨迹。时钟节点控制仿真的时间推进,UUV节点对各自UUV进行运动结算控制。
在此设计想定9个UUV随机分布在系统中,UUV任务为组成编队通过一个狭长海峡到达指定的区域。仿真开始后,首先由已经加入的UUV根据任务需求决定各自的角色,由系统中的UUV协商决定谁是主UUV,然后根据主UUV的决策组成编队。其他从UUV进入编队跟随状态。组成人字形编队。在探测到狭长海峡的时候由主UUV发出指令变换队形为一字型队形通过海峡。通过海峡后恢复人字形编队向目标区域航行。实现效果如图4和图5所示。
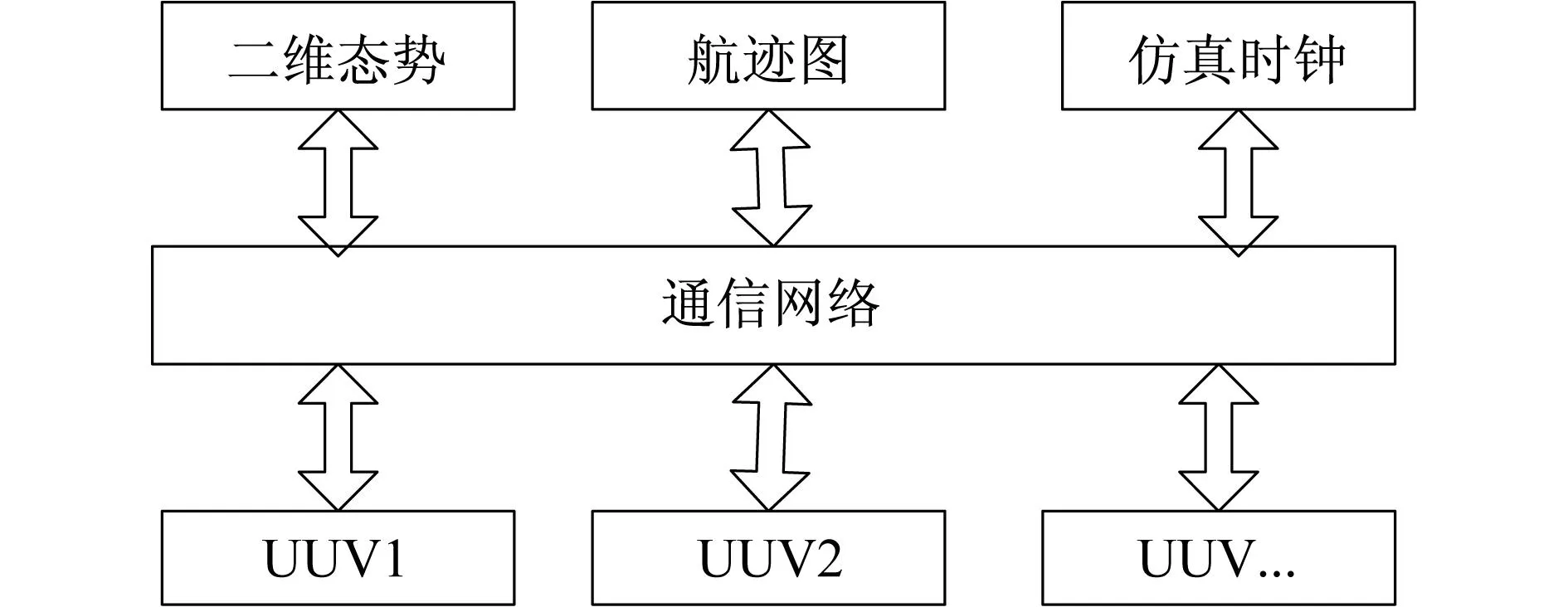
图3 系统结构图Fig.3 Simulation systemstructure
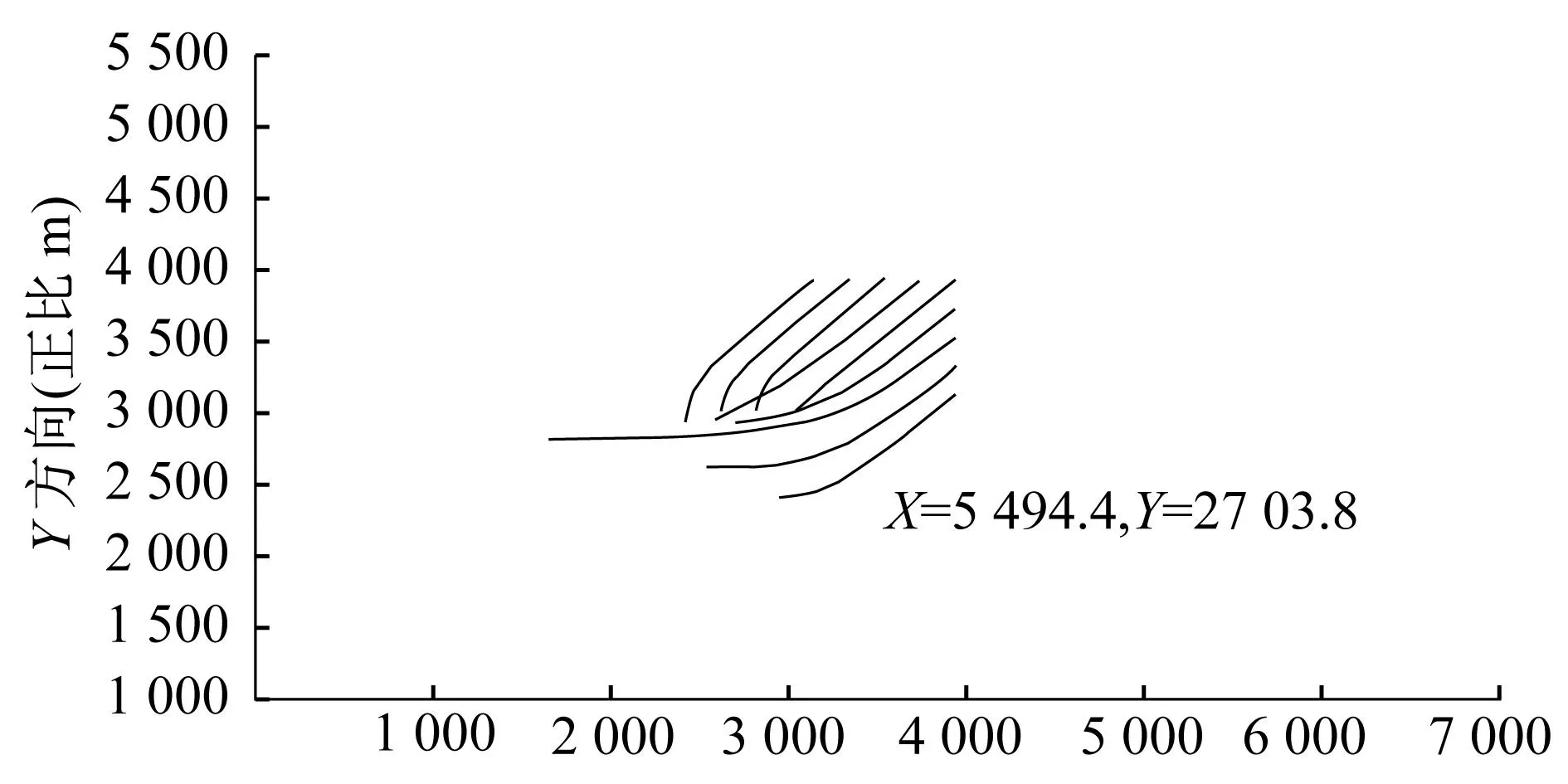
图4 UUV运行的航迹Fig.4 The interface of UUV
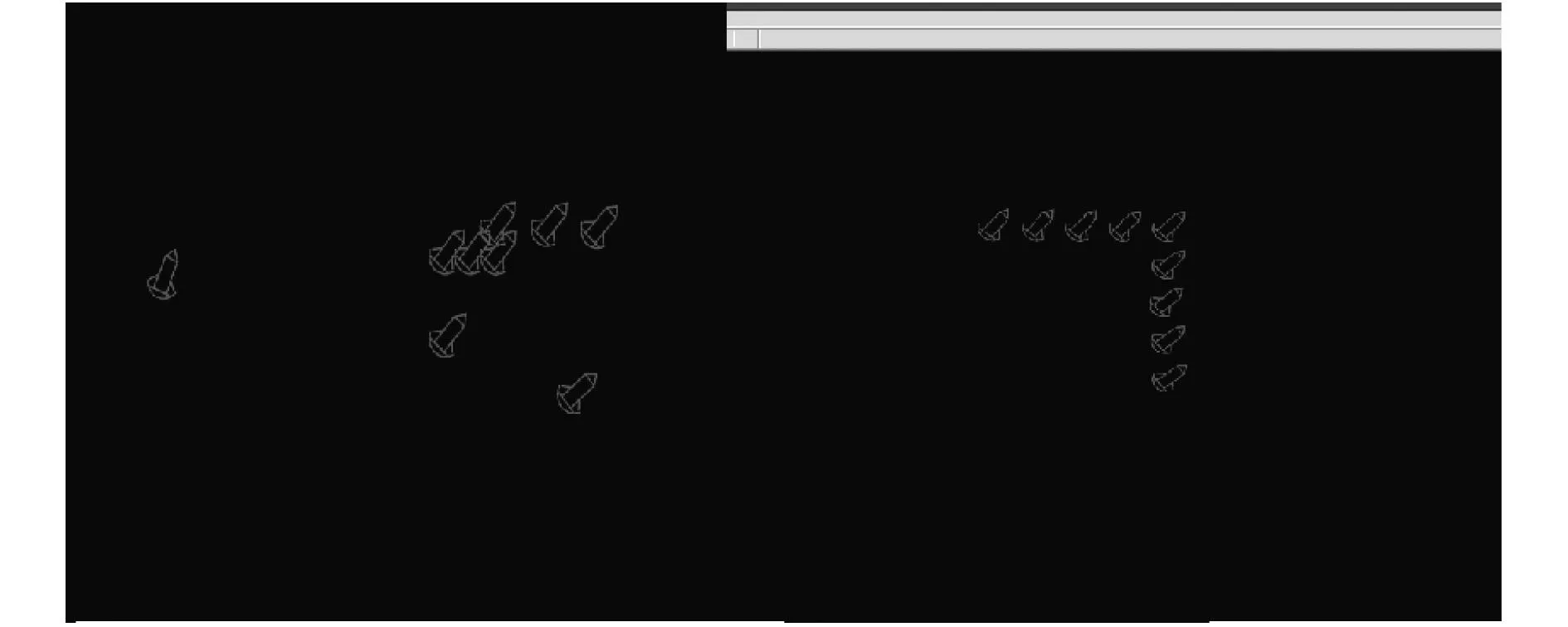
图5 UUV编队变换效果图Fig.5 The initial position and chevron formation of UUV
6结束语
本文利用作战体系中的命令指令形成命令集,代替BDI结构中的意图集,构成一种新的基于命令的Agent模型组织结构,给出了该模型的描述语言ABL的定义和语义解释,并构建了基于命令机制的智能UUV模型。我们并采用VC++实现了智能UUV机群控制仿真系统。仿真结果显示利用该模式构建的UUV作战机群更容易指挥控制,完成上级命令的效率更高。在组成编队的过程中不会出现多UUV抢占一个机位的问题。为构建基于MAS的水下网络中心战系统提供技术支撑。
参考文献:
[1]杨世欣.BDI Agent推理模型的研究[J].计算机与数字工程,2010,38(7):77-80.
Yang Shixin.Study on rational model based on BDI agent[J].Computer & Digital Engineering,2010,38(7):77-80.
[2]Jennings N R.On agent based softw are engineering[J].Artificial Intelligence,2000,117(2):277-296.
[3]赵晓哲,王超.基于MAS的编队协同作战仿真系统建模研究[J].系统仿真学报,2009,21(8):2381-2385.
ZHAO Xiaozhe,WANG Chao.Research on modeling of formation cooperative combat simulation system based on multi-agent system[J].Journal of System Simulation,2009,21(8):2381-2385.
[4]李宪港,李中学.基于使命的Agent组织模型[J].计算机工程,2008,34(23):187-195.
LI Xiangang,LI Zhongxue.Agent organizational model based on mission[J].Computer Engineering,2008,34(23):187-195.
[5]裘杭萍,肖登海,连向磊,等.一种新的基于Agent的体系结构[J].计算机技术与发展,2010,20(1):50-57.
QIU Hangping,XIAO Denghai,LIAN Xianglei,et al.A new architecture based on agent[J].Computer Technology and Development,2010,20(1):50-57.
[6]赵宁宁,徐德民,严卫生等.多自主水下航行器编队控制系统设计[J].火力与指挥控制,2011,36(1):154-157.
ZHAO Ningning,XU Demin, YAN Weisheng.Coordinated Control System Design for Multiple Autonomous Underwater Vehicle[J].Dire Control&Command Control.2011,36(1):154-157.
[7]曹军海,张和明,熊光楞.多Agent仿真中Agent行为的形式化描述方法[J].系统仿真学报,2004,16(11):2398-2400.
CAO Junhai,ZHANG Heming,XIONG Guangleng.Formalization description method of Agent behaviors for Multi-Agent simulation[J].Journal of system Simulation,2004,16(11):2398-2400.

李宏宏男(1983-),河北石家庄人,博士生,研究方向为计算机仿真、虚拟现实技术。

康凤举男(1947-),江苏无锡人,教授,博导,研究方向为系统仿真理论及应用,自动控制理论。

Design of intelligent UUV model under the commandLIHonghong1,2,KANGFengju1,2
(1.School of Marine Technology,Northwestern Polytechnical University,Xi’an,Shanxi 710072,China;
2.National Key Laboratory of Underwater Information Process and Control,Xi’an,Shanxi 710072,China)
Abstract:Compared with traditional BDI structure Agent which is controlled by individual consciousness to accomplish tasks,Multiple UUV combat receives command from carrier or submarine and takes action according to its surrounding information.Combined with research works from Agent Theory and military combat command system,this paper brings up a structure which is based on Agent model and illustrates the formula language to build up the command oriented intelligent UUV model.UUV model realized the MAS UUV Fleet Combat simulation system and provide technical support to the realization of MAS underwater network centric warfare systems.
Key words:command; UUV; agent organization model; combat simulation
中图分类号:TP 391.9
文献标识码:A
猜你喜欢
娃娃乐园·综合智能(2022年3期)2022-04-19
电脑爱好者(2021年18期)2021-09-23
人大建设(2020年2期)2020-07-27
网络安全和信息化(2019年1期)2019-12-22
网络安全和信息化(2019年1期)2019-12-22
军营文化天地(2018年2期)2018-04-20
电脑爱好者(2016年22期)2016-12-16
铁道通信信号(2016年2期)2016-06-01
铁道通信信号(2016年2期)2016-06-01
中国老区建设(2016年9期)2016-02-28
