模型驱动的复杂人机系统过程建模仿真方法
2016-01-26 03:36:22雷永林朱一凡谭跃进
系统工程与电子技术 2016年1期
雷永林, 朱一凡, 谭跃进, 杨 峰, 姚 剑
(国防科学技术大学信息系统与管理学院, 湖南 长沙 410073)
模型驱动的复杂人机系统过程建模仿真方法
雷永林, 朱一凡, 谭跃进, 杨峰, 姚剑
(国防科学技术大学信息系统与管理学院, 湖南 长沙 410073)
摘要:复杂人机系统涉及复杂的技术系统过程、认知决策过程以及人机协同过程,是当前系统工程研究最具挑战的领域之一。建模仿真在很多情况下是分析复杂人机系统过程性能效能的唯一可行选择。分析了复杂人机系统过程建模以及系统仿真模型表示的主要方法。结合平台级作战过程建模应用问题,给出了一种物理域、认知域、模型框架三分的复杂人机系统过程建模框架。在模型驱动方法的指导下,综合运用多方法建模、领域特定建模等方法讨论了复杂人机系统过程仿真模型设计问题。对其他领域的复杂人机系统过程建模仿真问题研究具有示范意义。
关键词:复杂人机系统; 过程建模与仿真; 模型驱动; 平台级作战过程
0引言
人机系统是一类强调人和机器协同分工共同完成某一使命任务的系统。其中人主要发挥监控和引导作用,机器负责繁琐、危险的任务执行功能。复杂人机系统则是指系统中存在组织化的人群和成规模的机器系统,在开放、动态、网络化的环境中完成复杂的使命任务[1]。典型的例子如高技术军事作战系统、民用航空管控系统、抗震救灾协同搜救系统等。由于人的因素的深度介入,复杂人机系统研制较之传统人工系统设计体现出了更多的复杂性,理论分析和实际试验均面临较大局限,仿真手段在很多时候成为唯一可行的选择。为了优化复杂人机系统的设计,一般要分析复杂人机系统工作过程的使命效能。这就要建立复杂人机系统的过程模型,并据此进行仿真分析。本文在分析综述目前各类复杂人机系统过程建模与仿真的方法的基础上,以军事系统平台级作战过程为例,在模型驱动方法的指导下,给出了一种物理域、认知域、模型框架三分的复杂人机系统过程建模框架。该框架基于模型驱动方法,综合运用多方法建模、领域特定建模等方法从领域和应用两个层面建立复杂人机系统过程仿真模型,支持过程模型的可扩展、可组合、可演化需求,对其他领域的复杂人机系统过程建模仿真问题研究具有示范意义。
1复杂人机系统过程建模方法
不同于一般系统的工作过程,复杂人机系统的工作过程分为人的认知决策过程、人工系统的技术功能过程以及人机一体交互协同过程。相应地,复杂人机系统过程建模方法也可以分为3部分讨论。
1.1人工系统的技术功能过程建模方法
复杂人工系统一般都属于典型的赛博物理系统(cyber-physical systems, CPS)[2],包括物理执行子系统和赛博控制子系统。其中物理执行子系统技术功能过程的时空变化属于典型的连续系统,一般用基于微分方程的连续系统建模方法来描述,并采用龙格库塔等数值仿真方法来求解,典型的连续系统建模语言或仿真工具是CSSL[3]、Modelica[4]和Simulink[5]。赛博控制子系统又可粗略地分为感知监测子系统和反馈控制子系统。感知监测子系统作用是对人工系统状态进行采样检测,其工作过程属于典型的离散时间过程,一般用基于差分方程的离散时间系统建模方法来描述,最常用的是一阶差分方程。因因果关系已知,离散时间系统的差分方程模型很容易在数字计算机上直接求解,实际上连续系统微分方程的数值仿真算法也是使用了这种因果关系已知的差分方程进行近似求解[6]。反馈控制子系统的作用是对人工系统进行多模式自动控制,一般用反馈多模态层次并发状态图来描述,最典型的例子是Statecharts状态图[7]。当前,许多建模语言或工具都支持Statecharts模型的表达,代表性的Statecharts实现主要有面向对象的IBM Rational Rhapsody[8]和非面向对象的Stateflow[9]。前者属于代表性的UML(unified modeling language)建模工具,实现了UML建模规范[10],包括UML State Machine Diagram,已经大量地用于反馈控制系统过程行为建模;后者是工业级仿真平台Simulink的扩展模块,支持反馈控制系统多模态模型的设计和仿真。除此之外,著名的嵌入式系统建模仿真平台Ptolemy Ⅱ也实现了Statecharts以支持多模态模型的描述[11]。
1.2人的认知决策过程建模方法
人的介入是复杂人机系统的主要复杂性来源,人的认知决策因而也是复杂人机系统过程建模的重点和难点,涉及认知科学、决策科学、人工智能等学科和技术。认知决策过程建模的目的是使计算模型在仿真中模拟人做出合理的决策并表现可信的行为[12]。在目前的复杂人机系统建模与仿真应用中认知决策过程建模方法分为3类:①基于规则推理建模准确实现建模人员的意图,典型的系统如Brawler[13]、EADSIM[14]、ModSAF[15]等;②基于人工智能建模生成最佳决策方案应用于仿真,典型的人工智能模型如Markov决策过程、博弈模型、影响网络等[16-17];③基于认知架构建模在仿真中产生更加真实的行为,典型的认知架构如Soar[18-19]和ACT-R[20-21]。
1.3人机交互协同过程建模方法
人机交互协同过程分为3类子过程:人机交互过程,主要是人在适当的时刻向技术系统施加适当的控制指令,技术系统以适当的方式适当的频率向人报告工作状态,在建模考虑上主要进行人机接口协议设计;人人交互过程,主要是同级不同个体之间或上下级之间互相通报态势、指令、请求、支援等信息,属于组织社会域的范畴。人人交互一般是间接地,需要各自所操纵物理系统特别是通信设备的支持,因此在建模上也需要提供通信协议接口,一般也合并到认知域并采用认知决策过程建模方法进行建模;机机交互过程,主要是多个技术系统之间通过预设的协同机制完成复杂使命任务,这种协同机制尽管复杂,但是确定的、自动化的,在建模时一般并入物理域进行建模。
这样一来,人机交互协同过程建模问题就可分为3个子问题:人机接口协议建模、组织社会域认知决策建模、物理域协同机制建模。后两个问题所采用的建模方法本质上仍然属于前述人的认知决策过程建模方法和技术功能过程建模方法的范畴。人机接口协议建模一般采用Agent架构,即将人机接口分为感知、理解、规划、决策、执行、通信等功能模块,分别设计相应的交互接口,支持认知域、组织社会域认知决策行为的描述。
2系统仿真模型表示方法
为了实现对上述复杂人机系统过程模型的计算机仿真运行以及实验分析,有必要在过程建模方法的基础上研究仿真模型的计算机表示问题。仿真模型表示是指在仿真建模方法的基础上,以某种计算机语言描述仿真模型,使其可以被计算机所理解,支持在计算机上进行自动化的运行实验。复杂人机系统过程建模涉及多方面的建模方法和异构模型,在系统层面的仿真模型表示方法要解决的就是要使得这些模型能够进行统一表示,支持模型的语义组合以及便捷演化。
当前,系统仿真领域能够支持异构仿真模型表示的方法大致可分为4类:统一仿真协议、统一建模方法、统一模型规范和模型驱动方法。
2.1统一仿真协议
统一仿真协议是一种在复杂系统仿真领域比较流行的方法。这种方法主要统一表示各类异构仿真模型的接口表示及互操作机制,并不限制模型内部的方法和实现细节,思路简单,容易上手,易于被各领域建模人员所接受,在包括复杂人机系统在内的各类复杂系统领域取得了广泛应用。著名的例子是高层体系结构(high level architecture, HLA)[22]。由于统一仿真协议对仿真模型本身限制很少,导致随着应用的深入和不断发展,许多深层次问题暴露出来,例如模型集成困难、维护调试困难、仿真实验管理复杂、运行效率不高、模型重用很难以组合方式实现等。这些问题其实大部分都可以也应该在建模层面得到处理,由于缺乏建模方法的支持,留给了实现层面[23]。实践表明,统一仿真协议主要适用于进行多仿真系统互操作集成,单独并不足以支持复杂人机系统异构过程仿真模型的统一表示、语义组合以及便捷演化。
2.2统一模型规范
统一模型规范在统一仿真协议规定仿真模型接口和互操作机制的基础上,进一步支持仿真模型的设计结构的平台无关表示,有利于仿真模型的可组合和便捷演化的实现。典型的例子是互操作标准化组织的基本对象模型(base object model, BOM)规范[24]和欧洲空间工业界的仿真建模平台(simulation modeling platform, SMP)规范[25]。BOM在HLA的基础上进一步规定了对象模型的概念模型表达以及基于状态的行为模式表达。SMP定义了类似HLA接口规范的仿真组件模型规范,以及仿真模型定义语言,支持仿真模型结构的平台无关表示。受设计目标限制,统一模型规范对于多领域异构行为模式的表达支持相对较弱。
2.3统一建模方法
统一建模方法是指对于多领域异构模型,采用统一的建模形式体系或建模语言来进行描述,并基于统一的仿真框架运行。统一建模方法不同于普通的仿真建模方法主要针对某一类行为模式,能够支持多类行为模式的描述。典型的如DEVS能够描述各类离散事件行为模式和各类离散时间行为模式,并能够以任意小精度表示连续时间行为模式[26];文献[4]能够以因果方式和非因果方式描述各类连续时间行为模式,能够描述离散系统领域的事件行为模式和状态行为模式。另外,UML也被作为一种统一建模方法大量地用于异构仿真建模[27]。尽管UML支持多类行为模型的一体化表达,由于缺乏许多对于仿真至关重要的建模元素和建模机制,本身并不是一种仿真建模方法。UML对多类仿真模型(主要是行为模型)的统一表示要向下映射到对象代码层面,难以满足语义组合和便捷演化的需要,主要适于过程模型的概念描述。
2.4模型驱动方法
同上述3类方法相比,模型驱动方法实际上是一种元方法。模型驱动方法是软件工程领域当前的主流范式,称作模型驱动工程(model driven engineering, MDE)[28]。模型驱动工程实际上提供了一种通用的计算模型表示方法,而不仅仅限于普通的软件建模。仿真模型的表示问题和软件建模类似,都属于计算建模的范畴,因此可以应用模型驱动工程方法以享用MDE所带来的统一表示、便捷演化等优势。MDE在操作上是一种基于元模型的方法,强调针对问题域构建恰当的元模型,并基于该元模型自动或半自动地构建面向问题域的建模语言和建模工具,通过统一的元元模型支持不同元模型的统一表达以及不同元模型之间的映射和集成,据此支持模型语义组合问题的解决。由于维护了明确的领域元模型,模型演化问题可以通过调整领域元模型来系统地加以解决。
目前MDE主要有两大流派:模型驱动架构(model driven architecture, MDA)[29]和领域特定建模(domain specific modeling, DSM)[30]。前者提供两种元建模方案,一种是轻量级的,另一种是重量级的。轻量级方案通过Profile机制在UML元模型基础上面向领域进行扩展。重量级的则直接通过MDA定义的元元模型MOF(meta object facility)进行领域元模型开发。前述SMP规范实际上也是遵循模型驱动方法进行定义,采用的是重量级方案,直接基于MOF定义其元模型[31]。DSM的思路和MDA的重量级方案类似,只是不一定非要基于MOF元元模型。就元建模支持环境而言,大多数的UML工具都支持MDA轻量级元建模方案,但并不支持重量级方案。DSM的典型支持环境如MetaEdit、GME、AtoM3、EMF。其中EMF(eclipse modeling framework)[32]采用MOF元元模型,因此实际上也是一种重量级的MDA元建模框架。
3模型驱动的作战过程建模与仿真
3.1需求分析
复杂军事系统属于典型的复杂人机系统,其作战过程涉及复杂的物理技术过程、人的认知决策过程和人机协同过程。复杂军事系统作战可以进一步分为多个层级,如涉及单一使命较少实体的平台交战级、涉及多个使命大量实体的使命级、涉及多个使命多个战术阶段的战役级等[33]。不同层级的过程建模则表现出明显不同的建模需求。这里结合实际主要考虑平台交战级。平台级作战过程模型表现出了明显的多模式行为,包括状态行为、事件行为、离散时间行为、连续时间行为、反应式行为、慎思式行为等。仿真模型表示方面则表现出了突出的领域特定建模、仿真模型重用、语义组合和快捷演化等需求。面对如此复杂的需求,任意单一的过程建模方法和仿真模型表示方法都是难以满足需求的,需要在模型驱动方法的基础上综合应用各类建模方法进行建模。
3.2模型驱动的平台级作战过程建模仿真框架
平台级作战过程一般以平台为中心,作战指挥员的认知决策主要是对所属平台上的作战系统进行战术控制以及与友邻作战平台进行作战协同。在建模考虑上,一般以平台模型为基础,按照Agent建模方法将指挥员的认知决策行为建模为平台Agent模型的感知、计划、决策等模块。多个作战平台之间的协同则分解为物理域协同和认知域协同两部分来实现。为此,可以将平台级作战过程模型分为3个有机联系的部分来建模:以平台为中心的模型框架、物理域行为模型、认知域行为模型。为支持三部分模型的可扩展、可组合、可演化,首先在领域工程思想的指导下将每部分模型分为领域和应用两个层面,其中领域层面的模型主要描述平台级作战领域的领域共性结构和行为,应用层面则在领域模型的基础上只需描述应用特定的行为。对于三部分都可以基于模型驱动方法综合运用各种合适的建模方法进行模型设计,这一点将在后续各部分介绍时展开。基于以上考虑,构建了模型驱动的平台级作战过程建模仿真框架,如图1所示。
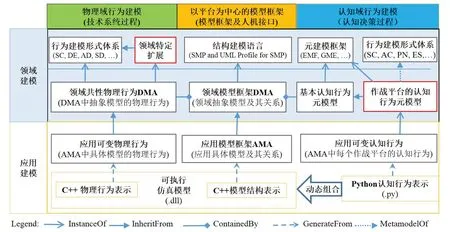
图1 模型驱动的平台级作战过程建模仿真框架
3.2.1以平台为中心的模型框架建模
模型框架是指系统主要的模型元素、元素自身的抽象层次以及元素间的结构和交互关系。以平台为中心的模型框架是指以平台模型元素为中心,来组合其他各类作战系统模型元素以及指挥员的认知决策模型。模型框架是整个作战过程模型的基础,确定了各类行为模型的主体来源和潜在的交互协同机制,并规定人机模型之间的交互接口。目前可用于模型框架建模的方法主要有Agent方法、面向对象方法、基于组件方法等。Agent方法抽象层次较高,框架约束性强,比较适合于个体众多、每个个体行为简单、交互涌现复杂的情况;面向对象方法则位于较低抽象层次,框架约束性弱,适合于结合问题特点建立更具针对性的模型框架;基于组件方法与面向对象方法联系密切,可以作为面向对象方法的补充。为此主要采用面向对象方法和基于组件方法进行建模,在其中根据需要实现Agent建模概念和机制。
(1) 基于UML的平台级模型框架建模
UML作为一种图形化建模语言,可以用来支持面向对象模型框架的图形化描述。图2是基于UML类图描述的平台级模型框架的顶层视图。其中≪Model≫表示模型元素对象,≪Interface≫表示模型对象之间的接口。tmPlatform表示平台模型,是整个模型框架的核心,各类作战武器(tmWeapon)、传感器(tmSensor)、通信设备(tmCommunicator)都被组合在平台模型中。tmWESS是整个作战过程模型的根,所有其他模型都被直接或间接地组合进tmWESS模型。tmGroup是编队模型,用于支持多个作战平台之间的协同。需要注意的是图中大部分模型对象都是抽象的(用斜体表示),表示还存在更多的更加具体的子类对象,描述在其他视图中。
在此模型框架之下,指挥员的认知决策模型被建模为平台模型(tmPlatform)的认知域模块,和物理域模块之间进行交互,二者之间的交互关系如图3所示。
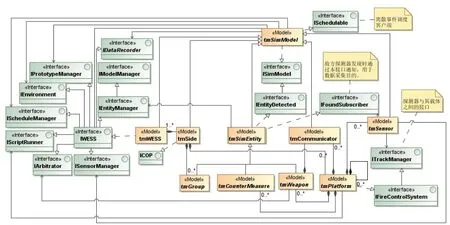
图2 顶层视图

图3 平台模型物理域认知域交互
(2) 基于SMP的平台级模型框架表示
由于SMP采用了模型驱动方法并基于MOF进行定义,上述基于UML的模型框架可以直接地转换为SMP表示。实际上,模型框架UML图中已经使用了UML的Profile技术将UML类图元素映射到SMP建模元素,这样一来,可以直接从基于UML的模型框架表示自动转换为SMP表示。图4给出了从UML表示转换生成的SMP表示。在SMP表示基础上,可以进一步产生模型框架的实现代码。从图4中可以看出平台模型tmPlatform的SMP表示及实现代码预览。
3.2.2物理域过程多方法建模
物理域模型主要描述技术系统的工作过程,具体到平台交战级作战过程,则需要描述上述模型框架中的各个模型对象的工作过程,包括各类平台、武器、探测器、对抗措施等。除了要支持这些过程的表达外,还要考虑支持领域特定建模、模型重用、快捷演化等非功能需求。UML作为一种统一建模语言,不仅提供支持模型框架建模的结构建模方法,而且提供支持多种行为模式描述的行为建模语言,支持模型的图形化表达,有利于建模人员对模型的理解和扩展。当然,UML并不能支持所有的物理行为建模需求,例、如连续行为建模、离散事件仿真建模等,但UML能够较好地支持更加复杂的多模态行为建模以及对象交互行为建模,为此选用UML作为主要的物理域过程建模方法,在此基础上结合实际需要进行扩展设计。下面介绍在实际中用到的几个典型的物理过程模型。
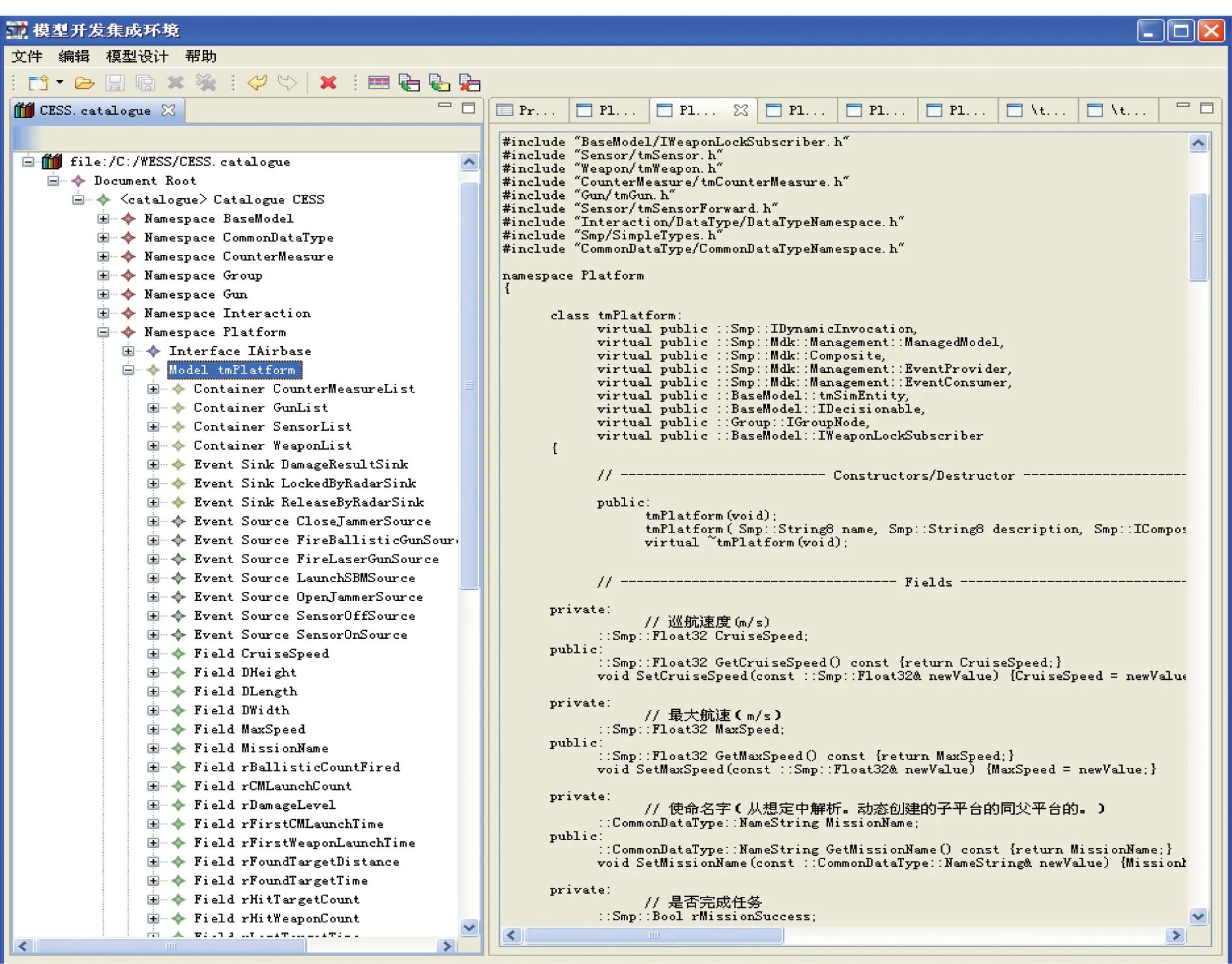
图4 SMP模型框架表示
(1) 基于Statecharts的制导武器行为建模
各型导弹、鱼雷等制导武器的行为表现出明显的模态性,即既有连续动力学行为,又有离散的模态控制行为。在不同的控制阶段,控制策略存在差异性,而连续动力学行为则基本相同,控制模式切换的触发信号或条件非常明确,适于采用UML的Statecharts行为图来进行描述。图5给出了一个基于Statecharts的地空导弹行为模型。图中主要给出了建模人员更为关心的多模态控制框架,连续动力学行为则实现在各个状态的do函数中。图形化表达不仅非常有利于建模人员理解模型的物理行为,便于维护和扩展,而且在代码生成器的支持下,可以方便地产生模型行为的框架代码。
图5 基于Statecharts的地空导弹行为建模
(2) 基于离散事件仿真的火炮行为建模
火炮是一类特殊的武器,在平台级模型层次一般并不需要模拟每个炮弹的弹道轨迹,而是根据火炮的角精度和杀伤概率计算炮弹的可能命中时间以及在命中时刻能否命中目标。命中时间可以基于炮弹的初速度以及炮弹和目标的初始位置来估算。为了估算是否命中,则需要精确地调度命中时刻,并依据目标在该时刻的实际位置计算是否命中。这一点可以通过定义开火(BulletFire)和命中(BulletHit)两个离散事件并通过离散事件仿真来调度实现。整个火炮的行为模型则通过Statecharts及其离散事件仿真扩展来实现,如图6和图7所示。其中图6给出了火炮的主要工作状态及其切换条件和事件,图7是对图6中用到的离散事件仿真调度机制的实现设计。
图6 基于Statecharts+离散事件仿真的火炮行为建模
图7 离散事件仿真模型框架
3.2.3认知行为领域特定建模
认知行为是人的行为。相对于技术系统的物理域行为,认知行为的特点是其可变性,即对于同一使命作战过程,指挥员可能希望尝试不同的战术决策方案以便取得更好的作战结果。认知域行为建模因此必须支持这种可变性,采用脚本来描述认知域模型,利用脚本的动态执行能力支持对同一使命作战过程战术决策方案的灵活修改。具体的脚本语言选用Python。另一方面,不同作战平台在不同的作战使命中可能存在差别很大的认知行为模式,例如对于战斗机空战,其主要认知行为模式可以基于状态来表达不同的作战阶段;而对于舰艇海战,则表现出明显的多任务并发协同模式,需要采用多任务并发计算模型(如Petri网)等。为此,针对不同的作战平台和作战任务,有必要提供更加针对性的建模方法和建模语言。选用DSM方法来进行认知域行为建模。DSM方法主要分为4个步骤:领域问题概念分析、领域元建模、领域建模语言定义和建模环境生成、领域代码生成器开发。下面以战斗机空战行为建模为例来说明领域特定建模方法的应用。
(1) 战斗机空战行为建模概念分析
战斗机空战行为表现出明显的基于状态的行为模式。典型的空战过程可以清晰地分为多个作战阶段,如图8所示。战斗机一开始按照计划的线路进行编队飞行,表示为FormFly阶段。发现目标后将进入作战模式,根据距离目标的远近进入超视距作战阶段BVRFight或近距作战阶段CACFight。收到物理域模型发送的导弹发射提示信号(Missile LaunchHint)后,如果是近距导弹发射,则进入摆脱阶段(Drag Away);如果是中远距导弹发射,则进入导弹制导阶段(Missile Guide)。当收到物理域模型发送的雷达锁定信号后(Lock By Radar),如果当前阶段是FormFly、BVRFight、CACFight、DragAway或RTB,则进入摆脱锁定(Break Lock)阶段。收到导弹告警信号(Missile Warning By ESM或MissileWarningByRadar)后,进入规避导弹阶段(AvoidMissile)。注意在收到MissileWarningByRadar事件后,并不是立即进入AvoidMissile阶段,而是要等到距目标一定距离(例如20 km)内,这样就需要通过外部调度一个条件事件(GuardEvent)来实现这一点。在不同的运动阶段,认知决策模型将下达不同的战术控制和机动动作指令,以控制战斗机平台模型的飞行和作战。
(2) 战斗机空战行为元建模
根据以上的概念分析,战斗机空战行为建模主要基于Statecharts,但并未使用Statecharts的全部特征,例如并发、历史等。另外需要结合领域的特点,例如状态称作作战阶段更合适、需要区分物理域内部事件和认知域外部事件、需要描述机动动作控制阶段、需要描述领域特定的约束等。为此有必要参照Statecharts元模型设计面向战斗机空战行为建模的元模型。在元模型建模语言和建模框架上,本文选用EMF。因为EMF目前已经成为实践上进行元建模的准标准技术,并提供GMF、OCL、XText等外围技术全方位地支持领域特定建模[34]。图9是一个初步的战斗机空战行为元模型,其中Node、Transition、AbstractState、PesudoState、FinalState等借鉴自Statecharts元模型,其他则结合战斗机空战行为建模实际需要而设计。
图8 基于UML状态机的空战行为概念模型
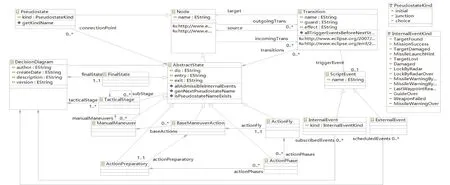
图9 基于EMF的战斗机空战行为元模型
(3) 战斗机空战行为建模工具生成
DSM方法的强大之处在于在领域元模型基础上可以通过配置生成图形化的领域特定建模工具。GMF[35]作为EMF技术路线中的图形建模框架,可以实现由上述EMF元模型生成图形化的战斗机空战行为建模工具。图10给出了生成的战斗机空战行为建模工具的截图,同前述基于UML Statecharts建立的空战行为概念模型图相比较,图10中的模型针对性更强,而且是完全可控、完全形式化的,可以在此基础上添加静态约束验证、动态行为代码生成等功能。
(4) 战斗机空战行为模型代码生成
基于上述领域特定工具建立的模型最重要的好处就是产生行为模型代码,支持认知决策建模人员在更高的层面表达决策行为而不用担心代码实现问题。我们基于Acceleo语言和State模式建立了图形模型到Python代码的转换模型,图11是基于上述模型产生的行为代码,这个代码可以动态地与物理域模型相集成共同进行平台级过程仿真。

图10 基于GMF生成的战斗机空战行为建模工具
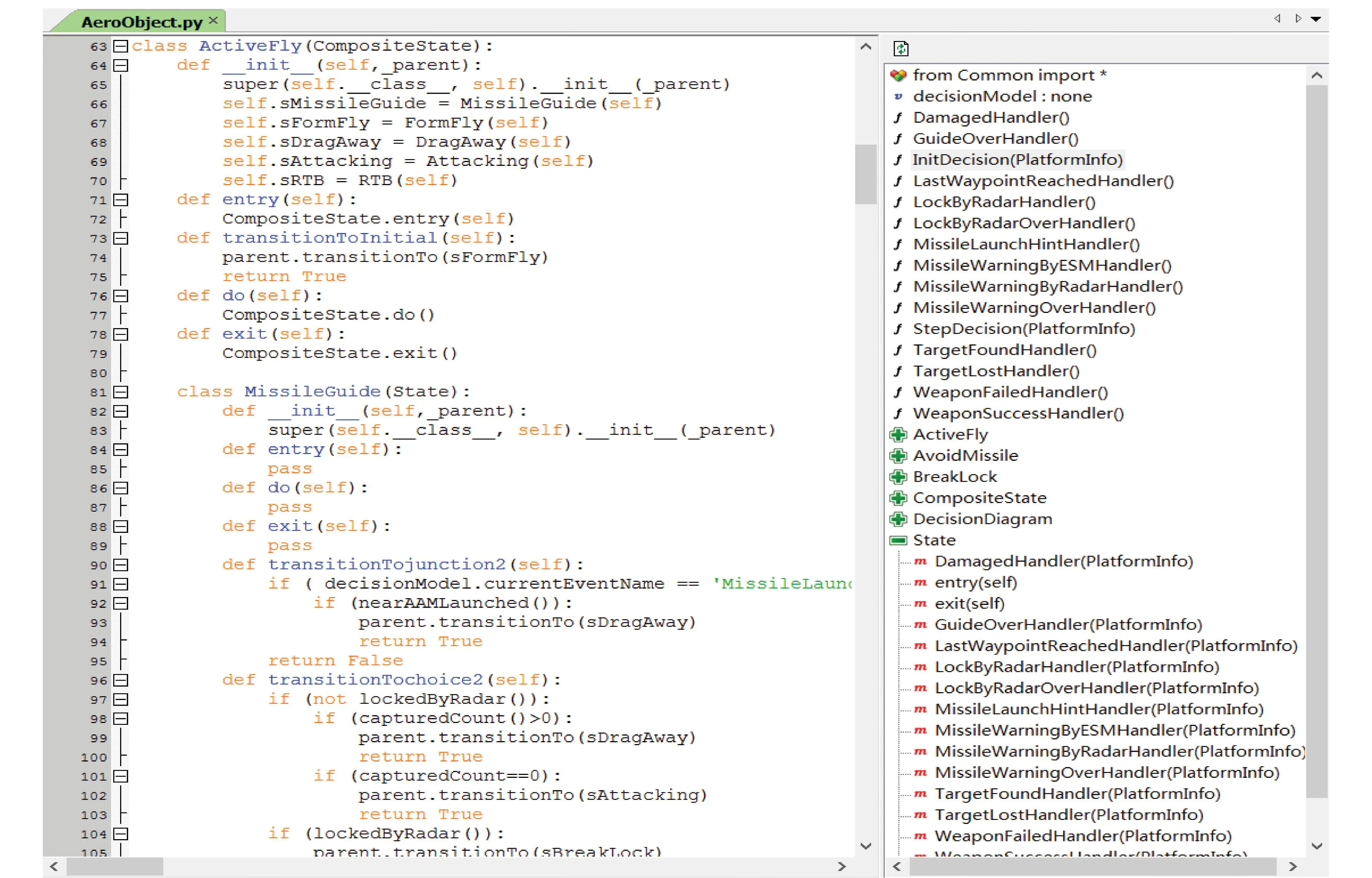
图11 基于Python的认知决策模型表示
4结论
复杂人机系统是当前系统工程研究最具挑战的领域之一。为支持复杂人机系统设计,建模仿真在很多情况下是分析复杂人机系统过程性能效能的唯一可行选择。本文从技术系统过程建模、认知决策过程建模、人机协同过程建模等方面分析了复杂人机系统过程建模的主要方法和应用概况。为支持复杂人机系统过程模型的仿真,进一步分析综述了系统仿真模型表示的主要方法。结合平台交战级作战过程建模应用问题,以模型驱动方法为指导,给出了一种物理域、认知域、模型框架三分的复杂人机系统过程建模框架,并讨论了综合运用多方法建模、领域特定建模等方法进行复杂人机系统过程仿真模型设计问题。其中平台级作战过程建模仿真框架对于其他领域的复杂人机系统过程建模仿真问题研究具有示范意义。
参考文献:
[1] Tan Y J, Wu J, Liu Z, et al. Large complex human-machine system structure and behavior modeling, and organization design method[J].JournalofSystemEngineeringTheoryandPractice,2011,31(S1):73-81(谭跃进,吴俊,刘忠,等.大型复杂人机系统结构、过程建模与组织设计方法研究现状与展望[J].系统工程理论与实践,2011,31(S1):73-81.)
[2] Edward A L. Cyber-physical systems-are computing foundations adequate?[C]∥Proc.oftheNSFWorkshopOnCyber-PhysicalSystems:ResearchMotivation,TechniquesandRoadmap, 2006.
[3] Astroem K, Elmqvist H, Mattsson S E. Evolution of continuous-time modeling and simulation[C]∥Proc.oftheEuropeanSimulationMulticonference, 1998:9-18.
[4] Modelica Association, Modelica Language Specification 3.3[EB/OL].[2014-12-20]. https:∥www.modelica.org/documents/ModelicaSpec33.pdf.
[5] MathWorks, Simulink® User’s Guide R2014a[EB/OL].[2014-12-19].http:∥www.mathworks.com/ products/simulink/.
[6] Fishwick P.Simulationmodeldesignandexecution:buildingdigitalworlds[M]. Upper Saddle River: Prentice Hall,1995
[7] Harel D. Statecharts: a visual formalism for complex systems[J].ScienceofComputerProgramming,1987,8(3):231-274.
[8] IBM white paper. Differences between rational rhapsody 8.0 Statecharts and UML 2.4.1 behavior state machine[EB/OL].[2014-12-19].http:∥www-01.ibm.com/support/docview.wss?uid=swg27040251.
[9] Hamon G. A denotational semantics for stateflow[C]∥Proc.ofthe5thACMInternationalConferenceonEmbeddedSoftware, 2005:164-172.
[10] OMG. OMG unified modeling language 2.5[EB/OL].[2014-12-10].http:∥www.omg.org/spec/UML/2.5.
[11] Ptolemaeus C. System design, modeling, and simulation: using Ptolemy Ⅱ[EB/OL].[2014-12-10]. Ptolemy.org.
[12] NATO RTO. Human behavior representation in constructive simulation[EB/OL].[2014-07-09]. http:∥www.dtic.mil/dtic/tr/fulltext/u2/a513651.pdf.
[13] Buschor D C. Sensitivity analysis of brawler pilot skill levels[EB/OL].[2014-08-07].http:∥www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=ADA342131.
[14] US Army Space and Missile Defense Command. EADSIM executive summary[EB/OL].[2014-07-03]. http:∥www.eadsim.com/EADSIMExecSum.pdf.
[15] Calder R. Modsaf behavior simulation and control[C]∥Proc.oftheConferenceonComputerGeneratedForcesandBehavioralRepresentation, 1993.
[16] Wu X Y.Theoryofdecisionanalysis[M]. Beijing: Science Press, 2010. (武小悦. 决策分析理论[M].北京: 科学出版社, 2010.)
[17] Virtanen K, Karelahti J. Modeling air combat by a moving horizon influence diagram game[J].JournalofGuidance,Control,andDynamics, 2006, 29(5):1080-1091.
[18] Laird J E.Thesoarcognitivearchitecture[M]. Boston: MIT Press, 2012
[19] Nielsen P, Smoot D. Participation of TacAir-Soar in RoadRunner and Coyote exercises at Air Force Research Lab[R]. Mesa AZ, 2006.
[20] Mittal S, Douglass S A. Net-centric ACT-R-based cognitive architecture with DEVS unified process[C]∥Proc.oftheSymposiumonTheoryofModeling&Simulation:DEVSIntegrativeM&SSymposium, 2011.
[21] Just M A, Varma S. The organization of thinking: what functional brain imaging reveals about the neuroarchitecture of complex cognition[J].Cognitive,Affective, &BehavioralNeuroscience, 2007, 7(3):153-191.
[22] IEEE Std 1516-2010. IEEE standard for modeling and simulation (M&S) high level architecture-framework and rules[S]. Hudson: IEEE, 2010.
[23] Nuno S, Nicola D N. E-40-07, a new standard for simulation model portability and its implementation in SIMULUS[EB/OL].[2013-2-2]. http:∥sunset.usc.edu/ gsaw/ gsaw2008/s3/dinisio.pdf.
[24] SISO-STD-003-2006. Base object model (BOM) template specification[S]. SISO, 2006.
[25] ECSS-E-TM-40-07 Volume 1A. Simulation modelling platform-volume 1: principle[S]. Nordwijk ZH: European Cooperation for Space Standardization, 2011.
[26] Zeigler B, Praehofer H, Kim T K.Theoryofmodelingandsimulation[M]. 2nd ed. Salt Lake City: Academic Press, 2000.
[27] Arief L B, Speirs N A. A UML tool for an automatic generation of simulation programs[C]∥Proc.ofthe2ndInternationalWorkshoponSoftwareandPerformance, 2000:71-76.
[28] Atkinson C, Thomas K. Model-driven development: a metamodeling foundation[J].Software, 2003, 20(5):36-41.
[29] Miller J, Mukerji J. MDA guide version 1.0.1[EB/OL].[2014-10-22]. www.omg.org/omg/2003-06-01.
[30] Kell S, Tolvanen J P.Domain-specificmodeling:enablingfullcodegeneration[M]. Weinheim: Wiley, 2008.
[31] ECSS-E-TM-40-07 Volume 2A. Simulation modelling platform-volume 2: metamodel[S]. Nordwijk ZH: European Cooperation for Space Standardization, 2011.
[32] Steinberg D, Budinsky F, Paternostro M, et al.EMF:eclipsemodelingframework[M]. Pearson Education, 2008.
[33] Andreas T.Engineeringprinciplesofcombatmodelinganddistributedsimulation[M]. Weinheim: Wiley, 2012.
[34] Eclipse. EMF Modeling Project[EB/OL].[2014-5-5]. http:∥www.eclipse.org/modeling/emf/.
[35] Eclipse. GMF[EB/OL].[2014-5-5]. http:∥www.eclipse.org/modeling/gmp/.
雷永林(1978-),男,副教授,博士,主要研究方向为复杂系统建模、模型驱动仿真。
E-mail:yllei@nudt.edu.cn
朱一凡(1963-),男,教授,博士,主要研究方向为装备体系论证、系统仿真。
E-mail:yfzhu@nudt.edu.cn
谭跃进(1958-),男,教授,博士,主要研究方向为复杂系统、装备体系工程。
E-mail:yj_tan@nudt.edu.cn
杨峰(1975-),男,教授,博士,主要研究方向为作战实验、体系工程。
E-mail:yf.nudt@gmail.com
姚剑(1988-),男,博士研究生,主要研究方向为认知行为建模、领域特定建模。
E-mail:markovyao@gmail.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150706.1606.002.html
Model driven process modeling and simulation of
complex man-machine systems
LEI Yong-lin, ZHU Yi-fan, TAN Yue-jin, YANG Feng, YAO Jian
(SchoolofInformationSystemsandManagement,NationalUniversityofDefenseTechnology,
Changsha410073,China)
Abstract:Complex man-machine systems (CMMS), as one of the most challenging areas in the field of systems engineering, encompass complex technological machine behavior, cognitive decision-making behavior, and collaborative man-machine interaction behavior. In many cases, modeling and simulation (M&S) is the only viable approach to analyze the performance and effectiveness of CMMS. Various behavior and process modeling and representation methods applied to CMMS are briefed. Taking complex systems and their engagement-level combating as an representative example of CMMS, a behavior and process modeling framework featured with a physical-cognitive-structural separation is proposed based on the model driven development (MDD) paradigm. A set of modeling technologies including multiple formalism modeling and domain-specific modeling are employed to better design the simulation models of CMMS behavior and process. The proposed model driven modeling methodology is also applicable to the behavior and process modeling and simulation of other CMMS.
Keywords:complex man-machine systems (CMMS); process modeling and simulation; model driven development (MDD); platform-level combating process
作者简介:
中图分类号:TP 391
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2016.01.34
基金项目:国家自然科学基金(61273198,71031007)资助课题
收稿日期:2015-01-28;修回日期:2015-05-27;网络优先出版日期:2015-07-06。