
基于流量控制和遥控配置的感应冲水控制器*
2016-01-20 10:20于显涛吴胜举
物理通报 2016年1期
于显涛 吴胜举 张 丹
(陕西师范大学物理学与信息技术学院 陕西 西安 710119)
基于流量控制和遥控配置的感应冲水控制器*
于显涛吴胜举张 丹
(陕西师范大学物理学与信息技术学院陕西 西安710119)
摘 要:现有的感应冲水控制器使用红外反射感应原理,按时长冲水,浪费水资源且冲洗效果无法保证.鉴于此,以单片机为核心研究了一种新型感应冲水控制器,使用热释电红外传感器和超声测距传感器配合采集距离数据,霍尔流量传感器实时监测冲水量,红外遥控器设置冲水器的运行参数,能够检测洁具使用情况并自动控制冲水.该装置进一步提高了节水效益,并增强了感应冲水控制器的易用性.
关键词:单片机流量控制遥控节水
厕所洁具感应冲水控制器具有自动控制、方便、卫生等优点,已在机场、车站、学校、写字楼等公共场所广泛使用.但是,经过对目前常用厕所洁具感应冲水控制器研究和市场上同类产品的调查,发现目前的厕所洁具感应冲水控制器由于产品设计中的不足,在使用中出现诸多弊端,存在着灵敏度低、冲水量受水压影响、缺乏理想的智能控制等问题,主要表现以下方面:
(1)目前的厕所洁具感应冲水控制器采用主动式红外感应方法[1],红外二极管向前方发射红外线,红外接收管根据前方物体反射回红外线的强度来判断是否有人如厕.其工作时易受环境光线和使用者着装影响,感应准确度不够高.因此容易误判而冲水,浪费水资源.
(2)主动式红外线感应无法判断前方物体的运动状况.如厕人流高峰期,由于人多拥挤,易误判而冲水,造成水资源浪费.另外,在空间狭小的卫生间中,从感应冲水控制器前面经过的人反射回来的红外线,也可能引起误判而冲水.
(3)目前的小便斗感应冲水控制器产品采用两段式冲水,但冲水策略不够完善,在使用者到来时和离开后均冲水,连续使用的情况下存在重复冲水问题,造成大量水资源浪费.
(4)目前厕所洁具感应冲水控制器均按时长冲水,由于水压处于动态变化中,因此每段冲水量会随水压变化而变化,水压低时冲水不足,水压高时又会造成浪费.
随着经济社会的不断发展,水资源短缺不断加剧.因此,笔者对冲水器的控制系统进行了设计,不但进一步提高了节水效益,而且在成本有限增加的前提下,使其具备智能化、操控简单的特点.
1设计思路
新型智能感应冲水控制器的原理框图如图1所示.

图1 新型智能感应冲水控制器原理框图
新设计的感应冲水控制器以STC89C52RC单片机为控制核心,用来接收处理外部信息并控制各部件;应用热释电红外传感技术[2]和超声波测距技术改进现有产品的数据采集性能;采用霍尔流量传感器精确控制每段冲水的冲水量;配有一体化红外接收头和红外遥控器,以实现更多拓展功能;采用相对节能的脉冲电磁阀控制水流通断.在提高该感应冲水控制器智能化水平的同时,增强了易用性和可操作性,并增加了人性化的新功能.
新型智能感应冲水控制器具有以下功能特点:
(1)使用者到来时进行第一段冲水,使用完毕离开后进行第二段冲水;
(2)红外遥控设置运行参数;
(3)采用霍尔流量传感器控制每段冲水量,每段冲水量由遥控器设置;
(4)可通过遥控器查询当日总耗水量,为合理设置每段冲水量提供参考;
(5)为保洁人员开发强制冲水功能,方便刷洗便器;
(6)根据使用频率自动开启/关闭第一段冲水,节约水资源;
(7)可用于蹲便器或小便斗,用于蹲便器时根据使用时长自动增减第二段冲水量;
(8)电磁阀损坏无法关闭时自动鸣响报警,提示维修;
(9)如在停水期间有人使用便器,来水后立即进行补救性冲洗.
2设计原理
2.1数据采集部分
本感应冲水控制器数据采集部分采用热释电红外传感器和超声测距传感器配合工作:热释电红外传感器用于检测便器前方是否有人,若前方有人,则超声测距传感器启动并测量前方人体的距离.
热释电红外传感器可检测到人体发出的红外线,并将其处理、放大,转换为电信号输出.其具有耗电量低、灵敏度高、寿命长的特点,正常工作电流在50 μA左右,可连续工作10年以上.当有人来到感应冲水控制器前方时,热释电红外传感器接收到人体发射的红外辐射线后,铁电体薄片极化强度降低,表面电荷失去平衡,从而在铁电体两端产生微弱的电压,该微弱电压经过放大电路放大,由比较器进行比较判断后,在输出端产生一个高电平输出.该输出信号经过反相放大输入单片机,从而控制超声测距传感器工作.
超声测距传感器用来采集使用者与冲水控制器之间的距离数据.超声测距传感器中超声换能器的特殊形状与其发射频率相适应,因而其发射的超声波具有指向性强、能量衰减少的特点,适用于距离的测量[3].本装置采用渡越时间检测法测距,如图2所示.
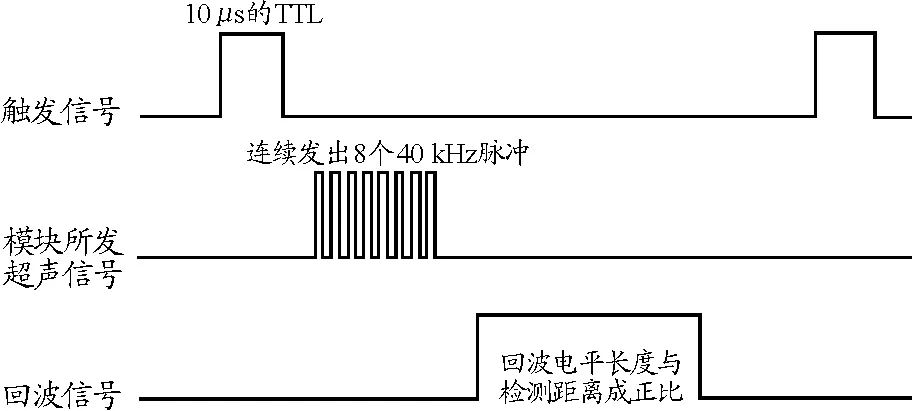
图2 超声波测距时序图
在超声波测量系统中,如果频率取得太低,外界的杂音干扰较多;而频率取得太高,在传播的过程中衰减较大.故在本装置应用超声波测量中,使用 40 kHz 的超声波.测距时首先由超声波发射换能器向前方发出8个频率为40 kHz的脉冲超声波,并在发射时刻打开计时器开始计时.由于超声测距传感器中电声换能器的压电晶片是一个小圆片,根据声学理论可知,压电晶片受激励振动时,离开超声测距传感器空间某一点的声压,是由压电晶片上数量较多的点声源辐射叠加形成的,由于不同相位干涉而具有指向性.当辐射频率对应的波长大于振动声源的尺寸时,指向性变得突出[4].其中,指向性最强的为主瓣,其余的为旁瓣,如图3所示.

图3 超声波指向性图
旁瓣有可能对测量结果造成干扰,本文超声测距模块主要用于近距离测量,因此选用了发射功率较小的超声换能器,旁瓣几乎不会对测量结果造成影响[5].
超声波在空气中向前方传播,碰到物体被反射回来,超声波接收换能器收到反射波立即停止计时并向单片机返回一个持续的高电平信号,这个高电平信号持续的时间就是超声波从发射到接收所经历的总时间t.由于声波在空气介质中的传播速度
c=(331.4+0.607T) m/s
(1)
其中T为环境温度.在测量精度要求不高的情况下可取340 m/s,所以前方物体距离s由下式确定
(2)
单片机根据计时器记录的时间t,计算出发射点距前方物体的距离s.由于使用空间的某些结构对超声波的反射或测量电路器件性能偏差等原因,可能导致某次测量结果大幅偏离准确值.单片机根据图4所示的流程,每次测量均连续采集多次距离数据,通过软件方法去掉偏差较大的数据,然后对剩余数据取平均值,即得到一次测量数据[6].重复以上步骤进行连续测量,根据数据变化特征判断使用者行为,进而识别出从前方经过的人和拥挤人群等易引起冲水器误判冲水的非正常使用情形,通过减少误判冲水,达到节约水资源的目的.

图4 冲水器工作流程图
新型智能感应冲水控制器在无人使用时处于待机模式,此时只开启热释电红外传感器而关闭超声测距传感器;当有人靠近时,启动超声测距传感器测量前方人体与冲水控制器之间的距离.这样不仅可以节约电能,而且发挥了热释电红外传感器寿命长的优点,减少了超声测距传感器的工作时长.可以有效延长其使用寿命,从而保证了整个感应冲水控制器的使用寿命.
2.2流量控制部分
采用霍尔流量传感器控制每段冲水量,可以有效弥补水压变化带来的影响,既能保证冲洗效果,又能杜绝不必要的水资源浪费.霍尔流量传感器主要由阀体、磁性水流转子、稳流组件和霍尔元件构成.
当水流过磁性转子组件时,磁性转子转动,并且转速随着流量成线性变化.磁性转子每转动一周霍尔元件向单片机输出一个脉冲信号,因为磁性转子每转动一周通过的水量为定值,因此单片机只需对脉冲信号进行计数即可算出流过的总水量.
2.3电磁阀控制电路
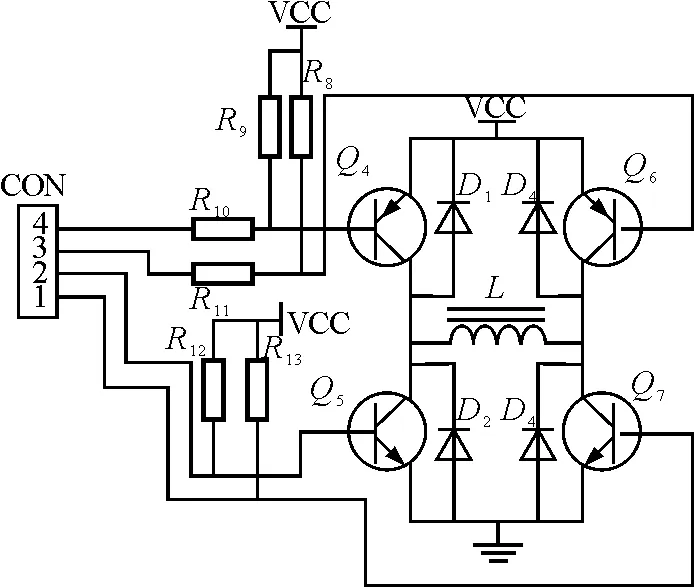
图5 电磁阀控制电路电气原理图
由于单片机输出信号不足以控制电磁阀正常开启/关闭,因此需要使用外部电路对单片机的输出信号进行放大.图5中的电磁阀L通过4个三极管(Q4~Q7)形成功率放大的正负脉冲,以控制电磁阀开闭.其中二极管D1~D4起到保护电路的作用,防止脉冲结束时电磁阀产生的瞬时高压对电路造成损害;R10和R11为限流电阻,防止基极电流过大损害单片机和三极管;R8,R9,R12,R13为上拉电阻,可以提高单片机的高电平输出能力,防止三极管因基极电流过小而无法正常导通.
2.4红外遥控控制及其设置
红外遥控控制部分由一体化红外接收头和红外遥控器组成,用以设定运行参数、控制相关功能.一体化红外接收头未接收到红外调制信号时输出高电平,接受到红外调制信号即输出低电平,将其输出端与单片机外部中断0相连,不需电平转换电路,即可在接收到红外信号时触发外部中断0.
遥控装置采用NEC编码,其红外遥控信号是采用脉宽调制的串行码,以脉宽为0.565 ms,间隔为0.56 ms,周期为1.125 ms的组合表示二进制的“0”;以脉宽为0.565 ms,间隔为1.685 ms,周期为2.25 ms的组合表示二进制的“1”,因此信号是由不连续的红外光传递,单片机根据一体化红外接收头的高、低电平持续时间来解调红外遥控信号的内容.而红外遥控器上每个按键对应一个固定的32位二进制键码,单片机根据解调得到的键码即可判断对应的按键并执行相应的功能.
2.5显示部分
本装置显示部分由4位共阴数码管和限流电阻构成,用来显示冲水控制器的运行状态和参数.若同时点亮4个数码管分别显示不同内容,需要的控制端口已超出单片机所能提供的最大端口数,因此使用动态扫描的方式来显示4位内容.动态扫描显示方式是利用了人眼的视觉暂留效应,把4个数码管按一定顺序(从左至右或从右至左)依次点亮.当点亮的频率不大时,我们看到的是数码管一个个地点亮,然而,当点亮频率足够大时,我们将看到4位全部同时点亮.因此我们只要给数码管一个较高扫描频率,那么就可以使用12个单片机端口实现4个数码管同时点亮.由于每个时刻只有一个数码管被点亮,因此动态扫描显示比同时点亮4个数码管节约75%的电能.
3实验结果分析
3.1对距离与行为特征的实验
模拟正常使用情况、有人从前方经过、前方人多拥挤等几种易引起感应冲水器误判冲水的情形,获得人体与冲水器间距离随时间变化关系如图6所示.
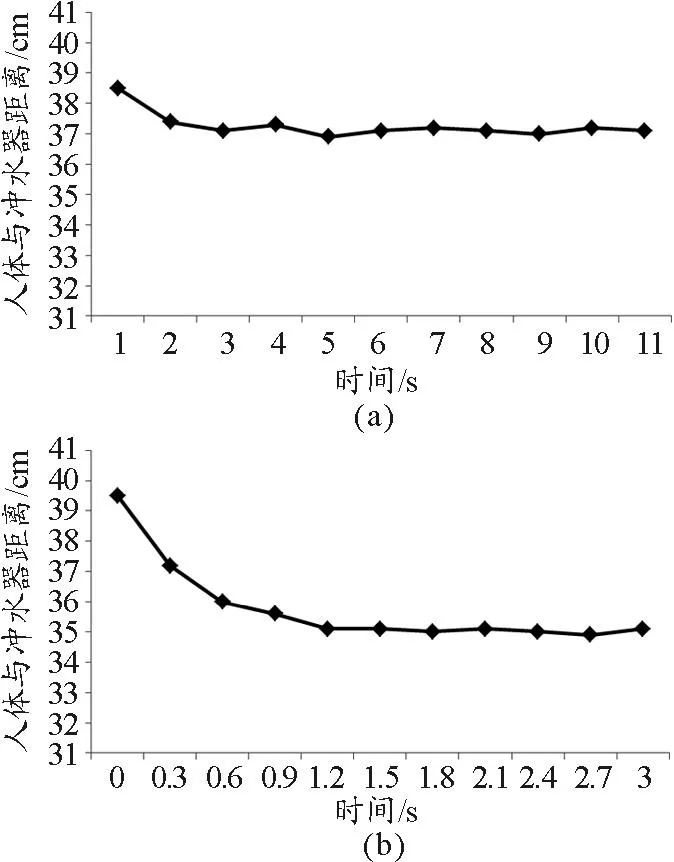
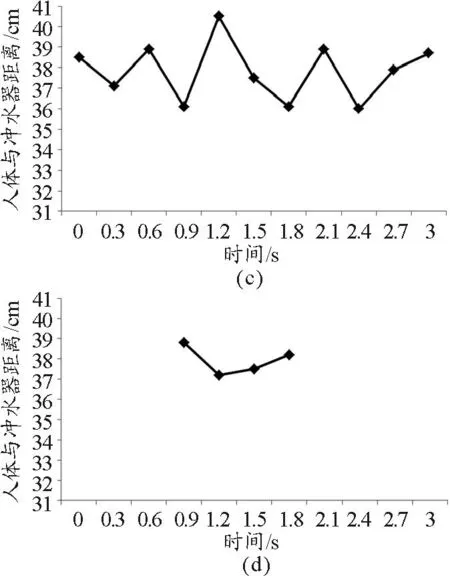
图6 不同情形下前方人体距离与时间变化关系
图6(a)、(b)为正常使用者距离与时间变化关系,其距离均由大减小,逐渐趋于稳定;图6(c)为冲水器前方拥挤人群距离与时间变化关系,其距离忽大忽小,变化幅度较大且无规律;图6(d)为从冲水器前方经过的人的距离与时间变化关系,其近距离数据只持续很短时间.由图容易看出,不同情形下的数据具有不同的特点,提取这几种使用情形的特征数据作为样本,单片机将检测到的距离数据与这些特征标本比较,即可筛选出正常使用的情形,减少了误判冲水动作,从而达到了节水的目的.
3.2对冲水策略与冲洗效果的研究
为了在保证冲洗效果的前提下减少耗水量,测试不同冲水策略的冲洗效果:
(1)使用前不冲水,使用后冲水5 L;
(2)使用前不冲水,使用后冲水10 L;
(3)使用前冲水1 L,使用后冲水4 L;
(4)使用前冲水2 L,使用后冲水4 L;
(5)使用前冲水1 L,使用后冲水5 L.实验获得不同冲水效果见表1所示.
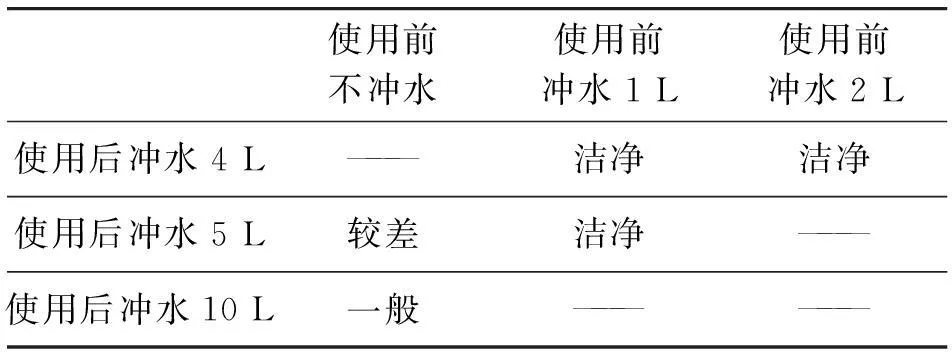
表1 冲水策略与冲洗效果关系
实验结果表明,第一种冲洗策略冲洗效果不理想;第二种冲洗策略冲洗效果比第一种冲洗策略稍好,但效果仍然不理想且耗水较多;第三种、第四种、第五种冲洗策略冲洗效果较第一种、第二种冲洗策略有很大提升,后三种冲洗策略耗水量依次相差1 L,但冲洗效果基本相同,因此选择第三种冲洗策略,以较少耗水量达到理想的冲洗效果.
3.3装置机械及电气性能
该装置为暗装式设计,上方进水下方出水,水流路径为:进水口—霍尔流量传感器—电磁阀—出水口;电源接口位于侧面,配有外置电源变换器将220 V市电转换为6 V直流电;前面板上方开孔安装超声测距传感器、数码管和一体化红外接收头,下方开孔安装热释电红外传感器.

图7 装置整体图片
该装置热释电红外感应范围为2~3 m;超声测距范围为0.02~4 m,测距精度为1 cm;装置正常工作水压范围为0.1~0.6 MPa;电磁阀开阀时间小于150 ms,关阀时间小于500 ms;红外遥控接收有效距离大于5 m;工作电压为6 V DC.装置整体图片如图7所示.
4结语
随着经济社会的不断发展,水资源短缺不断加
剧,针对已有感应冲水控制器在节水和智能化方面还有很大提升空间的现状,本研究设计的智能厕所洁具感应冲水控制器在较好地解决其不足的同时,增加了许多人性化新功能,因此具有广阔的发展前景.
参 考 文 献
1张江水. 两款红外线感应洁具的电路.电子报,2011(48):016
2孙华,李扬. 热释电红外传感器原理及其应用.内江科技,2010(012):116
3张丹. 基于单片机控制的超声测距系统的研究:[硕士论文].西安:陕西师范大学,2008
4杜功焕,龚秀芬,朱哲民. 声学基础.南京:南京大学出版社,2001.344~351
5沈燕,高晓蓉,孙增友,等. 基于单片机的超声波测距仪设计.现代电子技术,2012,35(7),126~129
6杨庆,陈桂明,董振旗. 一种改进的高精度超声测距方法研究.计算机技术与发展,2010,20(12):209~212
Induction Flushing Controller Based on Flow
Control and Remote Configuration
Yu XiantaoWu ShengjuZhang Dan
(College of Physics and Information Technology,Shaanxi Normal University,Xi’an,Shanxi710119)
Abstract:Existing sensor flushing controller uses infrared reflective induction principle,according to the length of time to control flushing, waste water and flushing effect can not be guaranteed. In view of this,This paper researched a new type induction flushing device based on MCU,which use the pyroelectric infrared sensors and ultrasonic distance sensor work togeher to collect range data,real-time monitoring of the Hall sensors of flushing water flow,infrared remote controller is used to set the run parameters of the device.The device can detect the use of sanitary and control flushing automatically.The apparatus further improve the water-saving benefits, and enhanced ease of using the induction flushing device.
Keywords:MCU;flow control;remote control;water saving
作者简介:于显涛(1994-),男,在读本科生.指导教师:吴胜举(1955-),男,教授,主要从事超声学与电子技术方向的研究.
收稿日期:*陕西师范大学勤助科研创新基金,编号:QZZD14013
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
科学(2020年3期)2020-01-06
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
大学生(2017年10期)2017-10-23
电子制作(2017年7期)2017-06-05
大众健康(2016年7期)2016-08-04
中学生数理化·高三版(2016年6期)2016-05-14
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
