
基于STC89C52单片机控制的可分离清扫迷你机械的设计
2016-01-16 07:20杨秀芝,袁斌,沈华东等
现代机械 2015年5期
基于STC89C52单片机控制的可分离清扫迷你机械的设计*
杨秀芝,袁斌,沈华东,肖新华,梅东,李继伍,周志全
(湖北理工学院机电学院,湖北黄石435003)
摘要:重点介绍了一种可以分体的清扫机械的机械结构和电子控制部分设计。该家用清洁机械既可组合工作实现宽敞大面积的清扫;同时,子体分离可实现对家具等的矮缝和窄缝等清扫。该机械具有成本低,综合利用率高等优点。
关键词:单片机控制可分离清扫机械设计
中图分类号:TP232文献标识码:A
基金项目:湖北省教育厅青年项目 (Q20123001) 资助;湖北省自然科学基金(2014CFB177)资助。
作者简介:杨秀芝(1974-),女, 副教授/博士,主要从事机械设计与制造,模具新材料的开发和设计及表面强化等方面的研究与教学。
收稿日期:2015-03-17
Control design of the detachable sweeping mini-machine based on STC89C52
YANG Xiuzhi,YUAN Bin,SHENG Huadong,XIAO Xinhua,MEI Dong,LI Jiwu,ZHOU Zhiquan
Abstract:The design of the mechanical structure and the electronic control part of a split sweeping mini-machine is introduced. The machine can work either in combination or separately, in order to improve work efficiency and its overall function. The low and narrow slit places under furniture and spacious ground can be cleaned by the cleaning machine automatically. This research has important guiding significance to improve the design efficiency of household machinery, reduce development cost.
Keywords:single chip microcomputer control;detachable cleaning;mechanic design
1可分离清扫机械设计思想与总体方案
1.1可分离清扫机械设计思想
目前,人们发明了各种自动化的清扫设备,例如自动清扫机、吸尘器等[1-5]。但这些自动化设备普遍存在一个问题就是对于家庭使用时还存在很大的局限性,例如对家具底下的矮缝和房间的窄缝地面无法清扫,而不得不靠人力花费大量时间来一点点的清理。本清扫机由主体、可分离的一对前轮和一对后轮(统称子体)三部分组成,三部分既可以组合工作也可以单独工作。主体的作用一方面是清扫室内空旷地方的垃圾以及拖地,另一方面可以为两对子体进行充电和储存垃圾。当主体控制部分检测到窄缝和矮缝时,两对子体可以同时从主体上分离出来,然后分别去工作。前子体实现清洁矮缝地面,并将垃圾扫到贮存装置中,工作完后自动回归到主体,将储存装置中的垃圾倒到主体的储存器中;后子体可以横向收缩,清洁窄缝地面,工作完后也回到主体将垃圾转移到主体中;当两个子体都回归到主体后主体继续清扫工作。图1为扫地机构示意图,图2为扫地轴受力简图,图3为机械结构图。
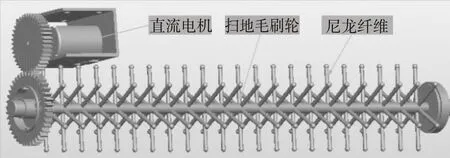
图1 扫地机构示意图

图2 扫地毛刷轮轴受力计算简图
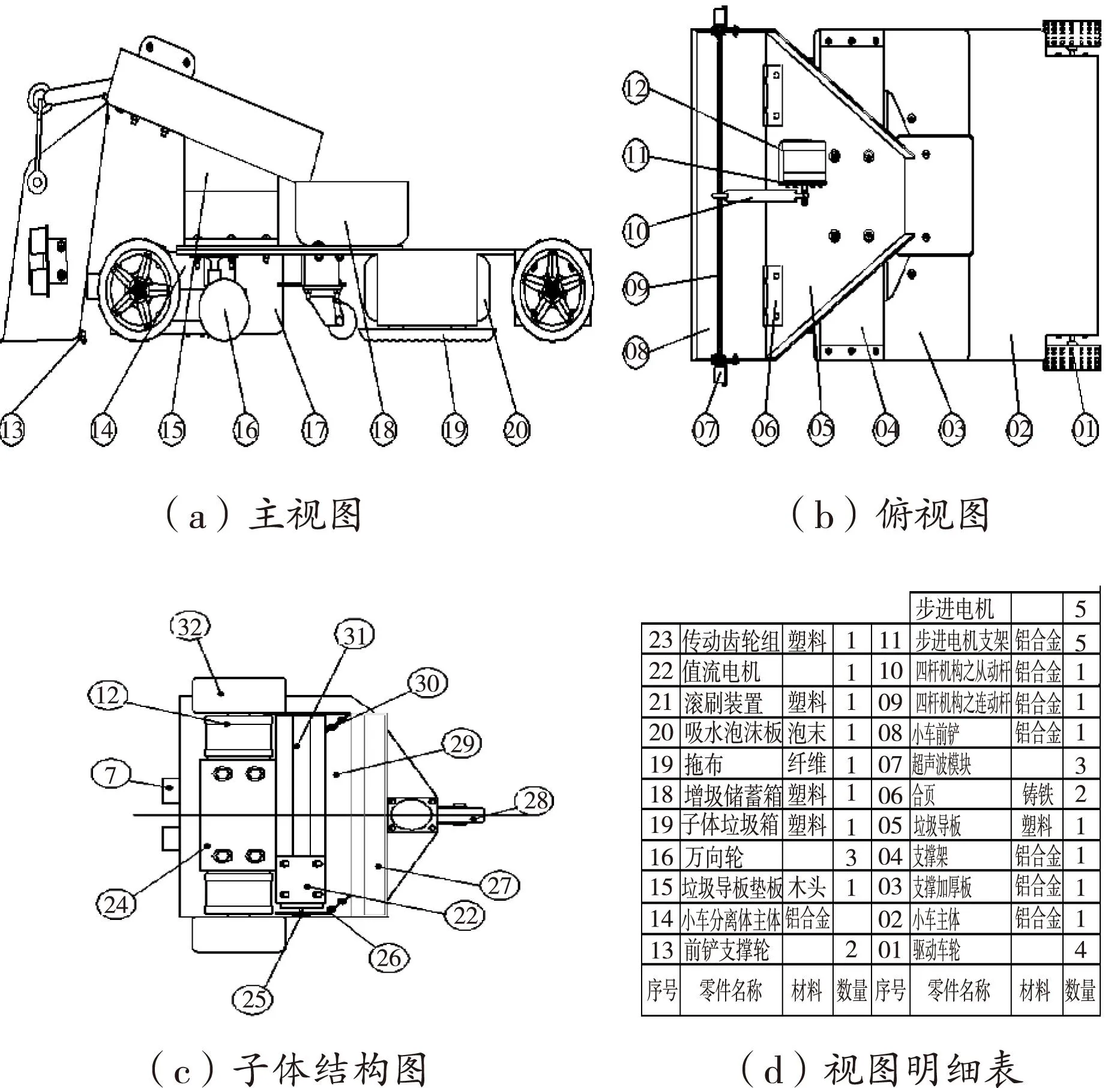
图3 清扫机械结构图
1.2总体控制方案设计
本设计以STC89C52单片机作为检测和控制核心。整个系统由3个STC89C52单片机控制,其中单片机1、2通过串行通信,控制4个超声波模块,对外界的环境进行检测,单片机1同时控制2个步进电机,为小车提供动力,单片机2控制2个步进电机,当判断要分离的信号时,驱动步进电机,带动四杆机构使子体分离,同时通过NRF24L01无线通讯模块完成与单片机3的通信。子体分离后单片机3驱动2个步进电机作为动力源,同时驱动直流电机带动清扫机构工作。单片机3上还装有两个改装后的PS-2鼠标,对平面的位置做定位,使分离子体完成分离和回归。两子体上分别配有一个超生波模块,作避障使用。当子体完成窄缝和矮缝清扫工作以后,按鼠标记忆的数据,控制步进电机回归;当分离子体回归后,单片机通过NRF24L01无线通讯模块让单片机2控制4杆机构把子体扣住。然后整个迷你机械继续工作。该清扫机械避障、分离、回归、检测数据已经清扫等功能的软件程序是通过C++语言实现的。图4 分离机械的总体控制模块。
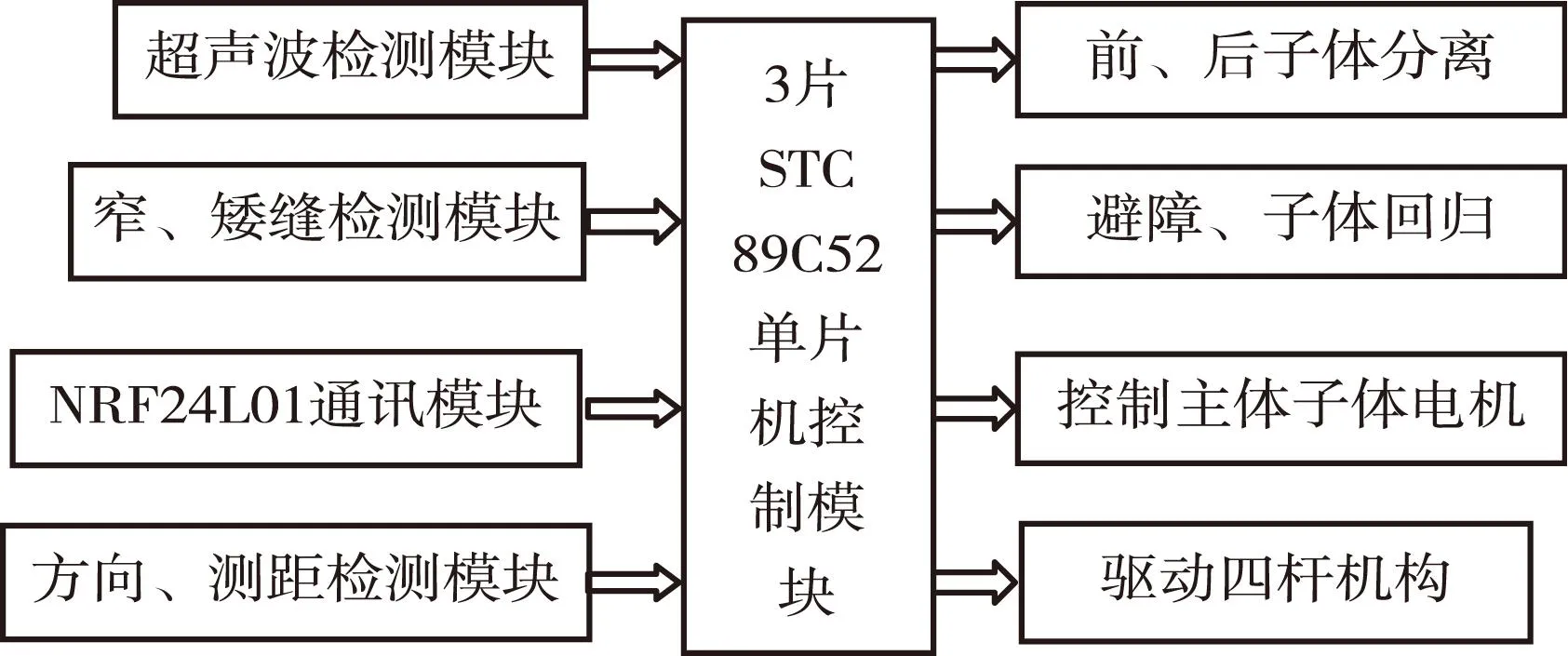
图4 分离机械的总体控制模块
1.3导航控制部分设计
此系统的运动控制部分硬件部分由单片机单元、传感器单元、电源单元、声光报警单元、键盘输入单元、电机控制单元和显示单元组成。光电鼠标的光学传感器象一部DC/DV一样,跟随操作者的移动连续记录它途经表面的“快照”,这些快照(即帧)是有一定的频率(即扫描频率、刷新率、帧速率等,以下我们对此不加区分)和尺寸及分辨率(即光学传感器的CMOS晶振的有效像素数),并且光学传感器的透镜应具备一定的放大作用;而光电鼠标的核心——DSP通过对比这些快照之间的差异从而识别移动的方向和位移量,并将这些确定的信息加以封装后通过USB接口源源不断地输入PC;驱动程序则根据这些信号经过一定的转换最终决定鼠标指针在屏幕上的位置。通过鼠标记录下子体分离时的位置,当子体工作完了以后可以知道子体现在的坐标。最后通过程序计算让子体回归到主体。由于在平面内定位不仅要有X,Y轴的坐标,同时还要考虑转动所引起的方向变化。经过综合考虑,最终选用两个鼠标做定位。鼠标导航流程图如图5所示。
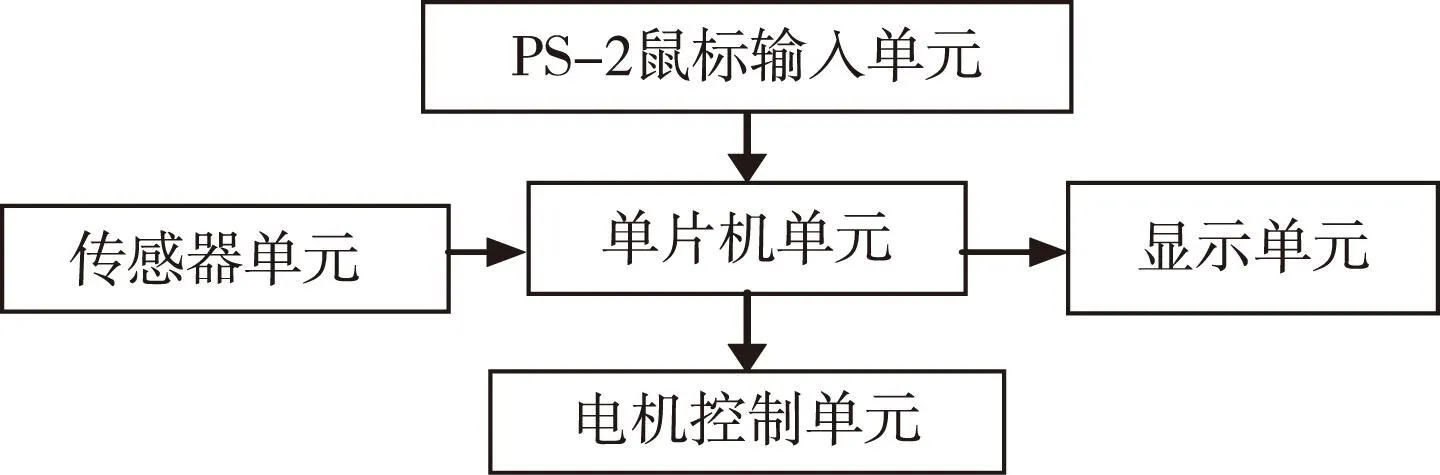
图5 PS导航流程图
2主体与子体电路图设计
本清扫机械控制电路分为两个部分,其主体部分硬件电路连接如图6所示,子体机构部分控制电路如图7所示。

图6 主体部分电路图 图7 分体机构电路图
3系统的软件设计
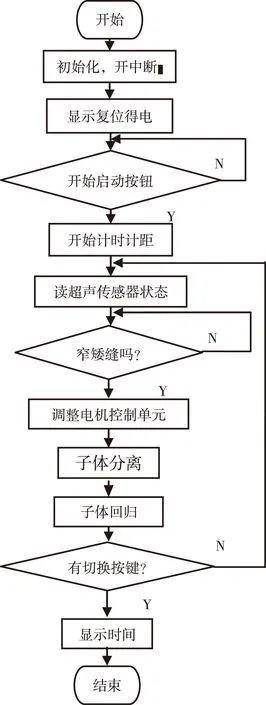
图8 系统的主体程序流程
该系统配套的软件程序采用模块结构,由C++语言编写完成。主要有初始化程序、主体调整程序、子体调整程序、声光指示子程序、读超声传感器状态、显示程序、中断服务子程序。系统的主体流程如图8所示。
4系统主要机械强度校核
本机械的强度校核内容较多,具体包括:被扫垃圾的运动分析及垃圾箱斜面设计及校核;直流电机的选择与校核;扫地机构运动分析及强度校核等等。下面以扫地毛刷轮轴的校核为例(图1和图2为扫地机构及其轮轴的受力分析图):
(1)求作用在齿轮上的力

T为电机力矩,D为电机轴上齿轮分度圆直径。
(2)求齿轮2上产生的力矩
d为扫地轮轴上齿轮分度圆直径。
(3)求毛刷上产生的阻力矩

f为毛刷转动过程中与地面的摩擦力,D1为毛刷理论直径。
(4)画受力简图与扭矩图
扭矩T=T0-T1=92.04-11=81.04N·mm
(5)校核轴的扭转强度
查表得45钢圆轴的许用扭转切应力为25MPa。

故轴的扭转强度符合要求。
5结束语
本迷你机械即可完成家庭客厅大面积的自动清洁也可实现室内窄矮缝的自动清洁任务;此设计理念可以用于广场大面积的清洁机构和街道小巷清洁机构的设计。
参考文献
[1]魏兵,熊禾根.机械原理[M].武汉:华中科技大学出版社,2007:268-304
[2]赵丕玉,刘仁杰等.多功能智能环保型清扫车的研制[J].机械,2009年第7期
[3]李金山,李琳,谭定忠.清洁机器人概述[M].哈尔滨:哈尔滨工程大学机电学院,2005:15-60
[4]郑玉华.典型机械产品构造[M].北京:科学出版社,2004:230-400
[5]成大先.机械设计手册(1-5卷)[M].北京:化学工业出版社,2002:14-1250
猜你喜欢
故事作文·低年级(2022年10期)2022-12-31
大电机技术(2022年5期)2022-11-17
中国交通信息化(2020年12期)2020-02-06
中国交通信息化(2019年7期)2019-10-08
船舶标准化工程师(2019年4期)2019-07-24
小学生学习指导(低年级)(2019年4期)2019-04-22
数学大王·低年级(2016年7期)2016-05-14
发明与创新·中学生(2014年1期)2014-01-24
少年科学(2009年1期)2009-01-20
IM家庭电子(2008年11期)2008-12-05
