一种改进的自适应步长的人工萤火虫算法
2016-01-15 07:44:37唐少虎,刘小明
智能系统学报 2015年3期
网络出版地址:http://www.cnki.net/kcms/detail/23.1538.tp.20150407.1107.001.html
一种改进的自适应步长的人工萤火虫算法
唐少虎1,2,刘小明1,2
(1.北方工业大学 电气与控制工程学院,北京100144;2.北方工业大学 城市道路交通智能控制技术北京市重点实验室,北京100144)
摘要:在基本的人工萤火虫算法(GSO)中,萤火虫的固定移动步长导致算法容易陷入局部最优并可能出现函数适应值的震荡现象。在一些自适应步长的人工萤火虫算法(A-GSO)中,算法迭代过程中会出现一些萤火虫的邻域集合为空集的现象,这将导致算法收敛速度降低并陷入局部最优值。为此,设计了改进的自适应步长的人工萤火虫算法(FA-GSO),改进的算法针对邻域无同伴的萤火虫引入觅食行为寻找优化方向并自适应调整移动步长,进一步提高求解精度和稳定性,并给出了算法的收敛性分析,结合GSO、A-GSO 2种算法对多个标准测试函数进行寻优并提取相关指标。通过指标对照,验证了FA-GSO算法的有效性,表明算法可以改善函数寻优的精度并提高迭代速度。
关键词:人工萤火虫算法;自适应步长;觅食行为;全局收敛性
DOI:10.3969/j.issn.1673-4785.201403025
中图分类号:TP183 文献标志码:A
收稿日期:2014-03-09. 网络出版日期:2015-04-07.
基金项目:国家自然科学基金资助项目(61374191);国家“863”计划资助项目(2012AA112401);“十二五”国家科技支撑计划课题专项经费资助项目(2014BAG03B01).
作者简介:
中文引用格式:唐少虎,刘小明. 一种改进的自适应步长的人工萤火虫算法[J]. 智能系统学报, 2015, 10(3): 470-475.
英文引用格式:TANG Shaohu, LIU Xiaoming. An improved adaptive step glowworm swarm optimization algorithm[J]. CAAI Transactions on Intelligent Systems, 2015, 10(3): 470-475.
An improved adaptive step glowworm swarm optimization algorithm
TANG Shaohu1,2, LIU Xiaoming1,2
(1. College of Electrical and Control Engineering, North China University of Technology, Beijing 100144, China; 2. Beijing Key Lab of Urban Intelligent Traffic Control Technology, North China University of Technology, Beijing 100144, China)
Abstract:In the basic glowworm swarm optimization (GSO), it is easy to fall into local optimum and the oscillation phenomenon of function adaptive values may occur because of the fixed step length. In some adaptive-step glowworm swarm optimization (A-GSO) algorithms, neighborhood sets of some fireflies may be empty in the iterative process of the algorithm, which leads to lower convergence speed and falls into local optimal value. Therefore, an improved foraging-behavior adaptive-step GSO (FA-GSO) algorithm was designed. The foraging behavior of the fireflies without neighborhood peer and adaptive step is introduced in order to find the optimization direction in the improved algorithm. The precision, stability, and global convergence analysis of FA-GSO is presented. After extracting and comparing the relevant optimization indicators of GSO, A-GSO and FA-GSO by several standard test functions, the effectiveness of the FA-GSO algorithm was verified, which indicates that the improved algorithm can improve the accuracy of function optimization and the iteration speed.
Keywords:glowworm swarm optimization; adaptive step; foraging behavior; global convergence

通信作者:唐少虎. E-mail: tshaohu@163.com.
大自然中的萤火虫种类多种多样,萤火虫通过身体发光来达到各种生存目的。一般说来,萤火虫的荧光素亮度越大越能找到其他萤火虫或越容易找到食物。最后,由于寻找同伴或者食物的原因导致许多萤火虫汇聚在一起。以此为启发,K. N. Krishnanad和D. Ghose总结形成了基本的人工萤火虫算法(glowworm swarm optimization, GSO),萤火虫最终会聚集成多个群体从而找到多个局部最优值,算法设计的迭代机制不仅有利于求解局部最优解,而且能够有助于快速求解全局最优值。所以,算法的优点是在搜索局部和全局最优解上具有速度快、效率高的特点,尤其在多模态函数求解问题等优化方面有着广泛的应用,如模拟机器人、多信号源追踪和定位、传感器的噪声测试等方面[1-4]。但另一方面,该算法也存在着一些问题,如算法全局最优解的搜索受到约束,存在陷入局部最优的风险。由于算法设计的萤火虫移动步长是固定的,不利于算法后期求解局部最优值,而步长自适应调整有利于提高求解的精度和收敛速度。周正新[5]和欧阳喆等[6]通过自适应调整算法不同阶段的移动步长,算法初期采取较大的步长有助于快速找到全局最优邻域,而后期较小的步长有利于精确求解局部最优和加快收敛速度。
自适应步长提高了算法的性能,但是在寻优的精度和稳定性方面还存在不足。本文针对基本和自适应步长的算法在迭代过程中出现的萤火虫邻域集合为空集时,导致算法收敛速度降低并很快陷入局部最优的问题,提出了一种改进的自适应步长的人工萤火虫算法,即基于觅食行为的自适应步长人工萤火虫算法。
1人工萤火虫算法原理
1.1基本的人工萤火虫算法
人工萤火虫算法(GSO)[7]是在2005年由K. N. Krishnanad和D. Ghose提出的一种新的群智能仿生优化算法。算法模拟了自然界中萤火虫求偶行为或者说是觅食行为。
GSO算法主要有4个阶段:萤火虫初始化阶段、荧光素更新阶段、位置移动阶段以及动态感知范围更新阶段。算法流程如图1所示。
1)初始化阶段。
初始化算法各个参数、各萤火虫的位置。萤火虫随机分布在目标可行域中,每只萤火虫携带的初始荧光素l0和感知半径r0是相同的。
2)荧光素更新阶段。
萤火虫的荧光素大小与其所在搜索空间中的位置有直接关系,萤火虫所在空间位置的评价值越高,则荧光素更新后的增长就越大,即萤火虫的发光强度也越大。另外,萤火虫的发光强度的强弱除了受所在空间值的影响,还和萤火虫上一次迭代的荧光素大小以及挥发速度的快慢有关联,萤火虫位置更新完成后,下一次迭代开始前,所有萤火虫的荧光素都会更新,荧光素根据式(1)更新:
(1)
式中:ρ(0<ρ<1)是萤火虫的荧光素挥发速度参数,γ是萤火虫的萤火素更新率参数,li(t)是在第t次迭代中萤火虫i的荧光素值,Ji(t+1)是在第t+1次迭代中萤火虫i的评价值。
3)位置移动阶段。
算法每次迭代后萤火虫会在搜索空间中更新自己的位置,即位置移动。在萤火虫i位置移动之前必须先找到一个符合条件的同伴,这个同伴必须满足以下2个条件:a)要在萤火虫i的感知范围内;b)携带的荧光素值要大于萤火虫i的荧光素值。
在全部满足以上2个条件的萤火虫中,根据式(2)计算选择每个同伴萤火虫的概率大小:
(2)

(3)
式中:s是萤火虫的移动步长,‖·‖是萤火虫i和j的欧式空间距离。
4)动态感知范围更新阶段。
萤火虫位置更新后,会动态调整自身感知范围,调整的大小是基于感知范围内同伴的数量多少。具体根据式(4)进行计算:
(4)
式中:nt是调整萤火虫邻域集合大小的参数,β是调整萤火虫动态感知范围大小的参数。

图1 基本的GSO算法流程 Fig. 1 Flow chart of basic GSO algorithm
1.2自适应步长人工萤火虫算法
2011年欧阳喆等[6]提出了一种自适应步长算法(adaptive-step GSO, A-GSO),引入荧光因子概念以在算法搜索过程中动态改变萤火虫移动步长,使算法避免陷入局部最优,提高寻优速度和精度。
荧光因子为
(5)
式中:Hi代表荧光因子,Xi是第i只萤火虫所在空间位置,Xm是此次迭代中萤光素浓度最大的萤火虫所在的空间位置,dmax是此次迭代中的最优萤火虫到其余全部萤火虫的空间距离的最大值。
基于荧光因子的自适应移动步长按照式(6)进行调整。
(6)
式中:si代表调整后的萤光虫移动步长,smax、smin代表萤火虫移动步长的最大值和最小值,Hi代表荧光因子。
2改进的人工萤火虫算法原理
2.1基于觅食行为的自适应步长人工萤火虫算法
在GSO以及A-GSO算法中,算法运行过程中可能出现一些萤火虫的邻域萤火虫集合Ni(t)为空集的现象,对这些萤火虫的在算法迭代过程中将会出现位置不移动的情况,这将导致算法收敛速度降低并易陷入局部最优值。2011年张军丽等[8]提出了利用人工鱼群的觅食行为选择下一个移动的位置,但是没有考虑步长的自适应调整。本文借鉴觅食行为,设计了邻域集合为空集的萤火虫自适应步长移动策略,提出一种改进的基于觅食行为的自适应步长的人工萤火虫算法(foraging-behavior adaptive-step GSO, FA-GSO),算法改进的基本思想是在邻居集合Ni(t)为空集的萤火虫位置更新前,先在其动态决策范围Ni(t)内执行觅食行为,将该位置作为萤火虫在下一时刻移动的方向,计算荧光因子得出动态调整的移动步长(自适应步长),然后进行位置的移动,接着更新萤火虫的感知范围,最后计算萤火虫的荧光素。这样在不影响算法整体求解效率的基础上能够进一步精确、快速求解最优值。

为了测试觅食次数N对算法性能的影响,本文把该值分别设置为5个不同的值对同一函数的迭代值进行对比。测试函数如下:
测试结果如图2所示,从图中可知,该值越小越易陷入局部最优,但是该值增大后并不能保证提高算法搜索精度,如图2(a)中觅食次数N=10时算法对函数的迭代精度最高,而图2(b)中觅食次数N=10、15和30时,算法对函数的迭代精度相当,其中精度最高是觅食次数为N=10时,因此在下面算法试验对比分析中,将觅食次数设置为10。
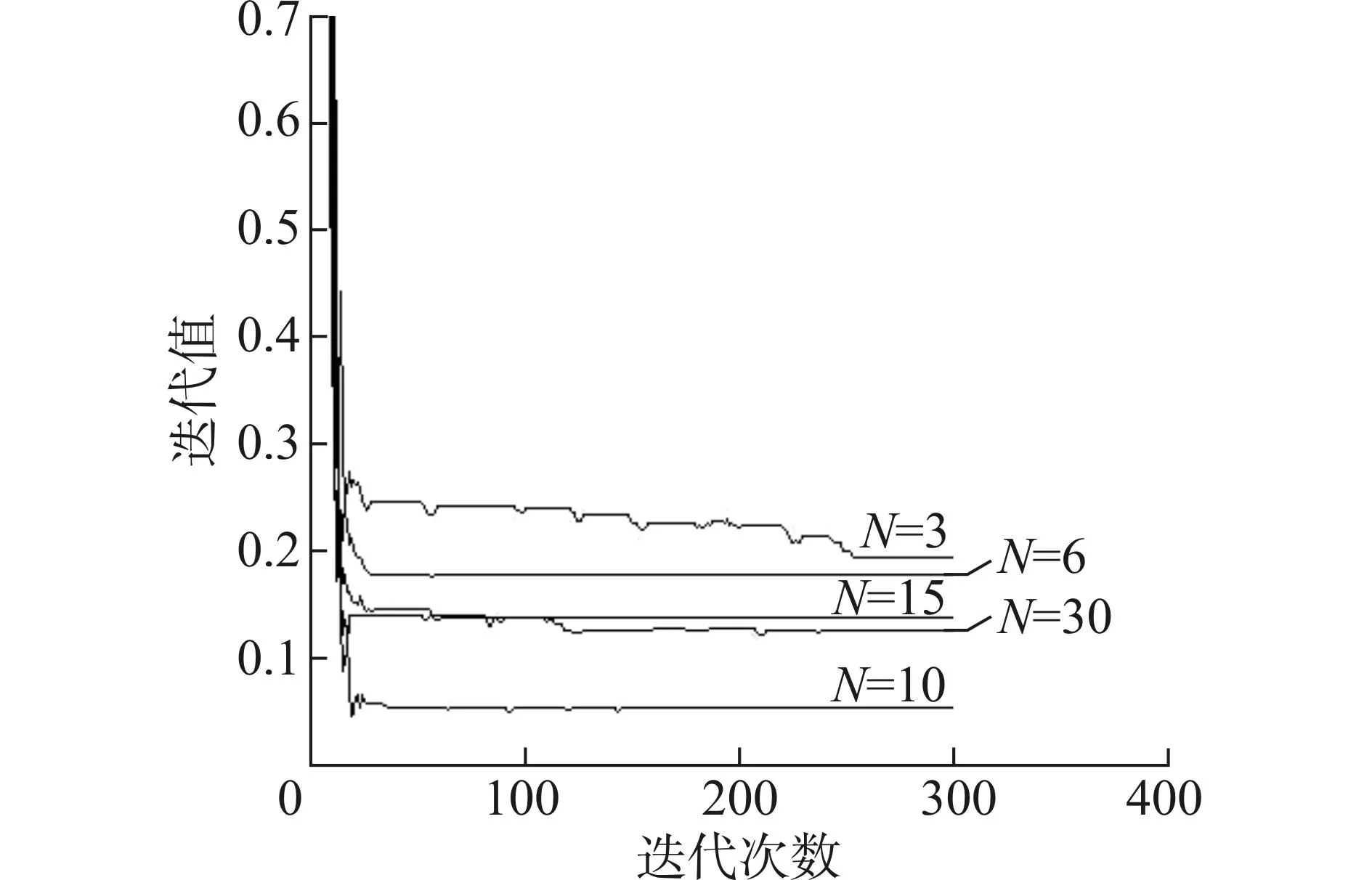
(a) 对比实验1

(b) 对比实验2 图2 觅食次数为不同值时函数迭代值对比 Fig. 2 Iterative value contrast of different foraging times
2.2FA-GSO算法收敛性分析
GSO算法、PSO算法(粒子群算法)都属于随机优化算法,刘洲洲等[9]和张慧斌等[10]分别对2种算法的收敛性给出了分析证明,他们依据的是Solis[11]给出的随机优化算法收敛性判定标准。
为了分析FA-GSO算法的收敛性,本文参考Solis提出的判定标准,给出分析证明。
条件1f(D(x,ξ))≤f(x),并且如果ξ∈S,则有f(D(x,ξ))≤f(ξ)。其中,f和S分别为目标函数和可行解空间,D(x,ξ)为算法第t+1次的迭代结果。

定理 FA-GSO算法以概率1收敛于全局最优解。
证明 根据1.2和2.1小节的描述,由于算法的步长是自适应调整的,依据是式(5)、(6),并且保证了无同伴萤火虫的优化搜索,通过判断萤火虫前后2次的荧光素大小确定位置是否移动,依据是式(3)和觅食策略,所以可以得出对于ξ∈S,有f(D(x,ξ))≤f(x),即满足条件1。

另改进的算法使得萤火虫都可以执行觅食行为,当觅食次数N→,则有L=S,进一步可得,即,所以满足条件2。

2.3FA-GSO实现步骤
综上,基于觅食行为的自适应步长人工萤火虫算法步骤描述如下:
1)初始化萤火虫群体和参数。将n只萤火虫随机地分布在搜索空间m维中,同时为每只萤火虫初始化以相同的荧光素l0和感应半径r0,初始化最大移动步长smax,最小移动步长smin,萤光素挥发系数ρ,觅食次数N,萤光素更新率γ以及设定迭代次数Nmax等,形成初始萤火虫群;
2)执行FA-GSO算法搜索。
对初始化的萤火虫个体,分别执行以下操作:
a)对每一个萤火虫i按式(1)更新荧光素的值,判断li(t+1)≤li(t)是否成立,如果是则转向b),否则在转向b)前,令xi(t+1)=xi(t)。
c)选择t+1时刻移动的方向:


d)根据式(5)计算每个萤火虫的荧光因子,并用式(6)计算动态移动步长。
e)萤火虫进行位置移动,根据式(3)更新位置;
f)根据式(4)更新萤火虫的动态感知范围。
3)判断是否达到指定的迭代次数,如果达到则转向步骤4),否则转向2)。
4)输出结果,程序结束。
3实验结果与分析
为了验证所设计的算法的有效性。选取4个标准测试函数进行验证,并与GSO算法以及自适应步长GSO算法(A-GSO)进行比较。这4个常用的测试函数如下。
实验的程序运行环境为:处理器Intel i3 CPU M380,主频为2.53 GHz,内存2 GB,操作系统为Windows XP,集成开发环境为Visual Studio 2005,算法用VB.NET编写。
算法参数初始化为萤火虫数量n为50,荧光素更新率r为0.6,荧光素挥发系数p为0.4,初始荧光素大小为5,感知范围为10,初始最小步长为0.01,最大步长为1,b=0.08,nt=5,觅食次数为10,最大迭代次数为300。对于上述4个标准测试函数进行试验,维数为10。
表1列出4个算法对选定的标准测试函数求解所得到的最优值、最差值、平均值和平均迭代次数比较,表中的平均迭代次数为10次独立实验所得到的迭代次数平均值。从表1中的数据对比中可以看到,FA-GSO算法平均通过42次迭代就找到了函数F1(x)最小值,而其他2种算法都没有找到最小值,而A-GSO的最优解要好于GSO迭代的最优解。对比3种算法搜索其他3个函数的最优解看,FA-GSO的最优解也是最接近最小值,A-GSO的最优解好于GSO搜索的最优解,观察另外2个指标,即最差解和平均解的数据对照,也可以得出类似的结论。所以可以看出FA-GSO算法在搜索函数极值的最优解、最差解以及平均解都要比另外3种算法有了一定程度上的提高,表明FA-GSO算法在收敛精度上要优于其他2种算法。观察表中的平均迭代次数,对比3个算法分别迭代给定的每个函数,可以看到FA-GSO算法平均迭代次数要少于其他2个算法,表明FA-GSO算法在收敛速度上要优于另外2种算法。

表1 GSO、A-GSO和FA-GSO算法函数测试指标
从图3~6中看到,4个函数的FA-GSO算法迭代曲线很接近横轴,即函数适应值很接近最小值,迭代精度要好于另外2种算法,而且算法能够找到最优解前的迭代次数也是最少的。此外,观察GSO算法在迭代函数F1(x)和F2(x)时都发生了适应值曲线的震荡现象,验证了固定步长带来的寻优缺陷,而A-GSO和FA-GSO算法曲线都相对稳定。从图6中还可以看到A-GSO算法在迭代函数F4(x)时所搜索的最优解并没有好于GSO,但是FA-GSO的最优解还是三者中精度最高的,说明搜寻机制改进后的算法在寻优精度方面有着较高的稳定性。从图中可以看出FA-GSO算法寻优比较稳定和快速。综上所述,FA-GSO算法在函数搜索精度以及速度2个关键方面的性能有着明显的改进,从而有助于提高寻优问题的求解效率。
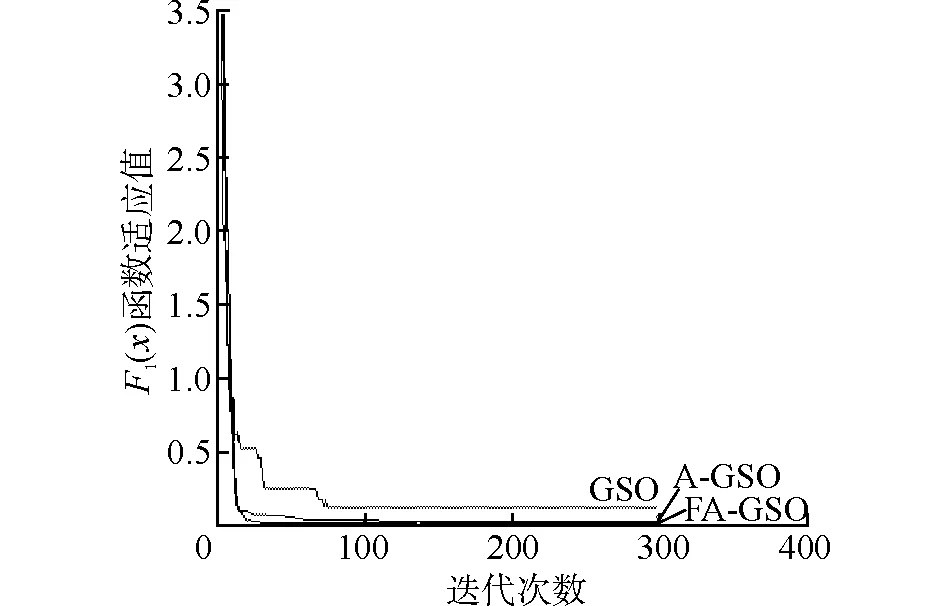
图3 F 1(x)函数值随3个算法迭代曲线 Fig. 3 Iterative values graph of F 1(x) tested by the three algorithms
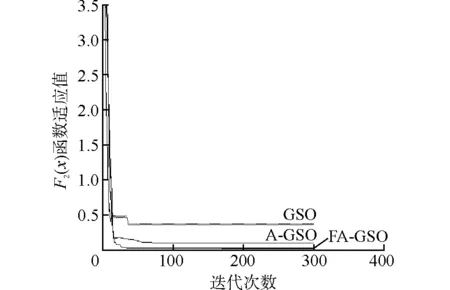
图4 F 2(x)函数值随3个算法迭代曲线 Fig. 4 Iterative values graph of F 2(x) tested by the three algorithms

图5 F 3(x)函数值随3个算法迭代曲线 Fig. 5 Iterative values graph of F 3(x) tested by the three algorithms

图6 F 4(x)函数值随3个算法迭代曲线 Fig. 6 Iterative values graph of F 4(x) tested by the three algorithms
4结束语
针对GSO和A-GSO算法存在的不足,为了有效避免算法过快陷入局部最优和寻优值的震荡现象,通过改进算法的迭代机制,在提出的FA-GSO算法中引入觅食行为并自适应调整移动步长进一步改善了局部搜索能力。本文采用3种算法对标准测试函数的试验,对照相关迭代指标并分析后得出FA-GSO算法寻优结果优于GSO和A-GSO算法,改进的算法是有效的,提高了寻优稳定性、收敛速度和求解精度,从而改善了算法的迭代效率。未来将要做的工作内容,可以在算法参数的优化分析及算法的应用(如交通信号和交通模型的优化等)做进一步研究和探索。
参考文献:
[1]LIAO Wenhua, KAO Yucheng, LI Yingshan. A sensor deployment approach using glowworm swarm optimization algorithm in wireless sensor networks[J]. Expert Systems with Applications, 38(10): 12180-12188.
[2]KRISHNANAND K N D, GHOSE D. Glowworm swarm based optimization algorithm for multimodal functions with collective robotics applications[J]. Multiagent and Grid Systems, 2006, 2(3) 209-222.
[3]KRISHNANAND K N, GHOSE D. Glowworm swarm optimization for simultaneous capture of multiple local optima of multimodal functions[J]. Swarm Intelligence, 2009, 3(2): 87-124.
[4]YANG Yan, ZHOU Yongquan, GONG Qiaoqiao. Hybrid artificial glowworm swarm optimization algorithm for solving system of nonlinear equations[J]. Journal of Computational Information Systems, 2010, 6(10) 3431-3438.
[5]黄正新, 周永权. 自适应步长萤火虫群多模态函数优化算法[J]. 计算机科学, 2011, 38(7): 220-224.
HUANG Zhengxin, ZHOU Yongquan. Self-adaptive step glowworm swarm optimization algorithm for optimizing multimodal functions[J]. Computer Science, 2011, 38(7): 220-224.
[6]欧阳喆, 周永权. 自适应步长萤火虫优化算法[J]. 计算机应用, 2011, 31(7): 1804-1807.
OUYANG Zhe, ZHOU Yongquan. Self-adaptive step glowworm swarm optimization algorithm[J]. Journal of Computer Applications, 2011, 31(7): 1804-1807.
[7]KRISHNANAND K N D, GHOSE D. Glowworm swarm optimization: a new method for optimizing multi-modal functions[J]. Computational Intelligence Studies, 2009, 1(1): 93-119
[8]张军丽, 周永权. 人工萤火虫与差分进化混合优化算法[J]. 信息与控制, 2011, 40(5): 608-613.
ZHANG Junli, ZHOU Yongquan. A hybrid optimization algorithm based on artificial glowworm swarm and differential evolution[J]. Information and Control, 2011, 40(5): 608-613.
[9]刘洲洲, 王福豹, 张克旺. 基于改进萤火虫优化算法的WSN 覆盖优化分析[J]. 传感技术学报, 2013, 26(5): 675-682.
LIU Zhouzhou, WANG Fubao, ZHANG Kewang. Performance analysis of improved glowworm swarm optimization algorithm and the application in coverage optimization of WSNs[J]. Chinese Journal of Sensors and Actuators, 2013, 26(5): 675-682.
[10]张慧斌, 王鸿斌, 胡志军. PSO算法全局收敛性分析[J]. 计算机工程与应用, 2011, 47(34): 61-63.
ZHANG Huibin, WANG Hongbin, HU Zhijun. Analysis of particle swarm optimization algorithm global convergence method[J]. Computer Engineering and Applications, 2011, 47(34): 61-63.
[11]SOLIS F J, WETS R J B. Minimization by random search techniques[J]. Mathematics of Operations Research, 1981, 6(1): 19-30.

唐少虎,男,1986年生,博士研究生,主要研究方向为交通控制、群智能算法。
刘小明,男,1974年生,教授,博士,主要研究方向为交通控制、交通流理论。近年来主持国家级、省部级科研项目8项,获大连市科学技术一等奖1项,北京市科学技术成果二、三等奖各1项,中国智能交通协会科学技术奖二等奖1项。申请发明专利3项,授权发明专利1项,授权实用新型专利1项,获软件著作权4项。发表学术论文40余篇,出版专著1部、译著1部。