CO2焊熔池图像采集与处理研究
2016-01-04 16:32刘晓刚黄诗刘天元
山东工业技术 2016年1期
关键词:图像处理
刘晓刚 黄诗 刘天元
摘 要:本文用视觉检测系统采集二氧化碳焊熔池的图像,对熔池图像用Matlab软件进行处理和边缘提取,获得高质量的熔池图像,为进一步进行熔池图像处理和焊缝跟踪技术奠定基础。
关键词:熔池图像;图像处理;边缘提取
DOI:10.16640/j.cnki.37-1222/t.2016.01.026
0 引言
科学技术的不断进步,焊接机器人在焊接领域占有举足轻重的地位,焊接过程中,焊接自动化直接影响焊接的质量。近几年许多研究者利用CCD相机获取熔池图像,将获取的图像利用Matlab软件对图像进行处理,获得清晰的熔池图像[1-2]。影响焊接质量的因素很多,其中焊缝宽度最为突出,只有获得清晰的熔池图像才能为后续的研究做好准备。熔池的几何形状可以为后续的焊缝跟踪技术奠定基础[1]。但是,焊接时弧光干扰和飞溅成为获得清晰图像的主要障碍[3]。为了扫清这一障碍不少研究人员也提出了解决办法。
1 CO2焊熔池视觉系统
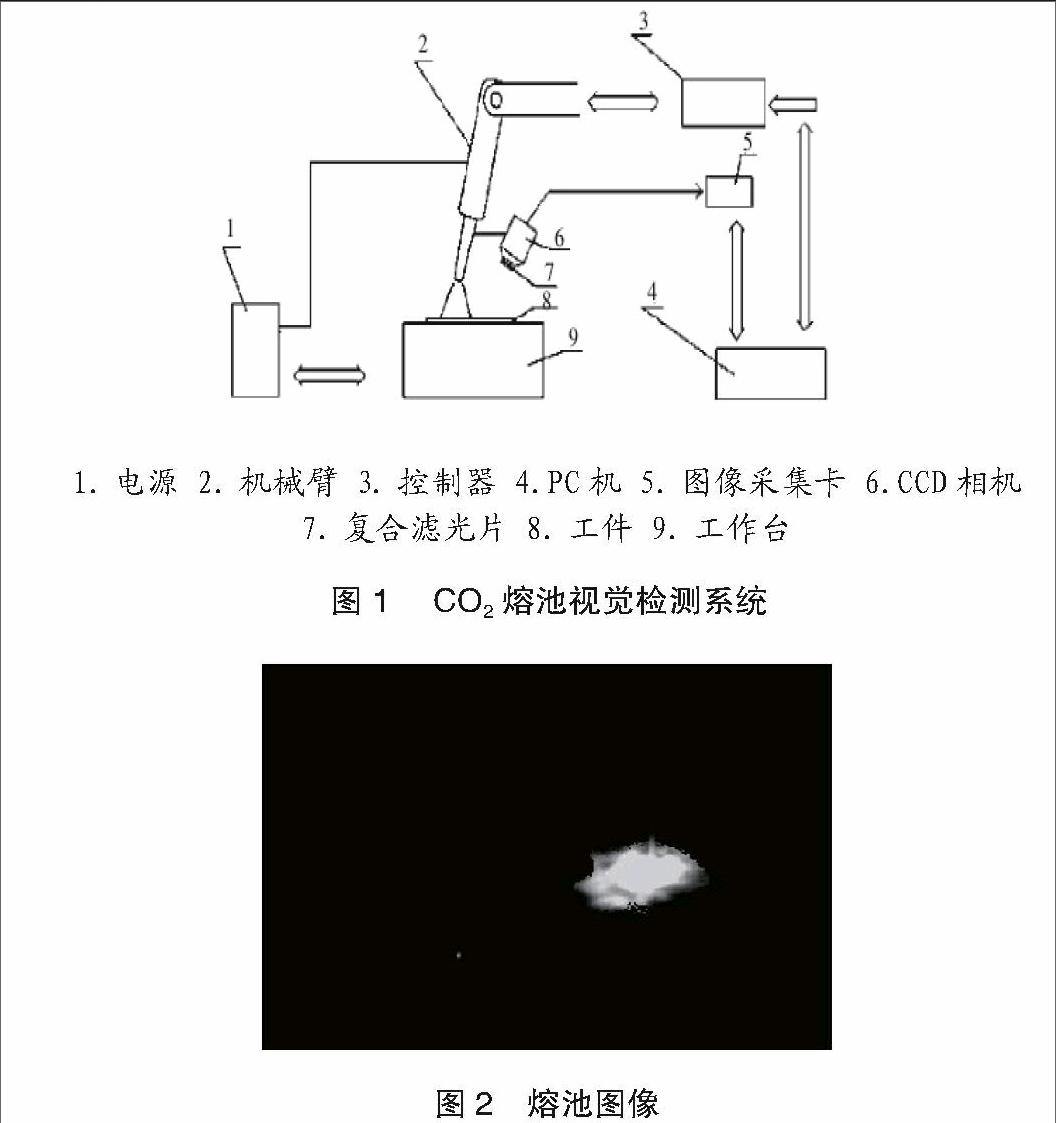
目前计算机不断更新,各硬件和软件的不断升级,许多研究者用图像传感设备使许多机器人也具备了一定视觉功能。它们既具有焊接工人的视觉感知能力,也可以获取飞溅干扰下的焊缝图像、实时提取焊接熔池特征参数、预测焊缝的组织结构和性能等工作,确保焊缝质量的稳定和可靠[4]。建立如图1所示的CO2熔池视觉系统,该系统由焊接电源、机械手、焊机控制箱、计算机、采集卡、近红外CCD、滤光片、试件、工作台等部分组成[5]。焊接试验采用短路过渡二氧化碳气体保护焊,电弧电压15V,焊接电流 100A,焊接速度 1200mm/min,板材为低碳钢,板厚6mm,焊丝为¢1.2mm,气体流量为20L/min。焊接时CCD摄像机将熔池图像信息传送给图像采集卡,并将其转化为数字信号传输给计算机,经过处理后提取出清晰的熔池图像,如图2。
2 图像预处理
由于CCD摄像机自身的特点,在采集熔池图像的过程中,往往会受到许多因素干扰,产生很大的噪声。通常消除噪声的方法有两类:一类是不考虑噪声产生的原因,只显示对我们有用的部分,弱化不重要的信息;另一类是考虑噪声的来源,对其补偿,使补偿后的图像非常接近原图像。第一类降噪的常用方法有均值滤波、图像平滑等,这类方法可以降低一定的噪声,但是需要较好的算法,否则图像会变得更加模糊。第二类方法主要包括逆滤波器、最小二乘约束复原等方法,这类方法有时能获得较好的效果,但是算法相当复杂[6]。 针对采集到的熔池图像普遍存有水平条纹这个特点,通常选择图像滤波对图像进行预处理。
2.1 熔池图像的滤波去噪
在数学领域,图像噪声可以分为加性噪声和乘性噪声,数学公式如下表示:
g(x,y)= f(x,y)+n(x,y) (1)
g(x,y)= f(x,y)*n(x,y) (2)
公式中g(x,y)表示处理后的图像,f(x,y)表示图像输入信号,n(x,y)表示干扰信号。其中加性噪声的图像信号强度不随噪声的变化而变化;而乘性噪声的图像信号强度会随噪声的变化而变化。
2.2 均值滤波
在焊接过程中,由于熔池图像中存在噪声颗粒使得焊接过程中的熔池图像的灰度往往会发生突变,此时我们对图像进行均值滤波处理。均值滤波的核心方法是邻域平均法,用平均值来代替原图像中的单个的像素值是均值滤波的核心理论。例如,有一张刚采集的熔池图像,取图像上的一个像素点A(x,y),以点A(x, y)为中心的领域的各点形成模块,对模块的各点取均值,最后把A(x,y)的值用均值代替,此时点A的值为其灰度 g(x0,y0),如公式(3)所示:
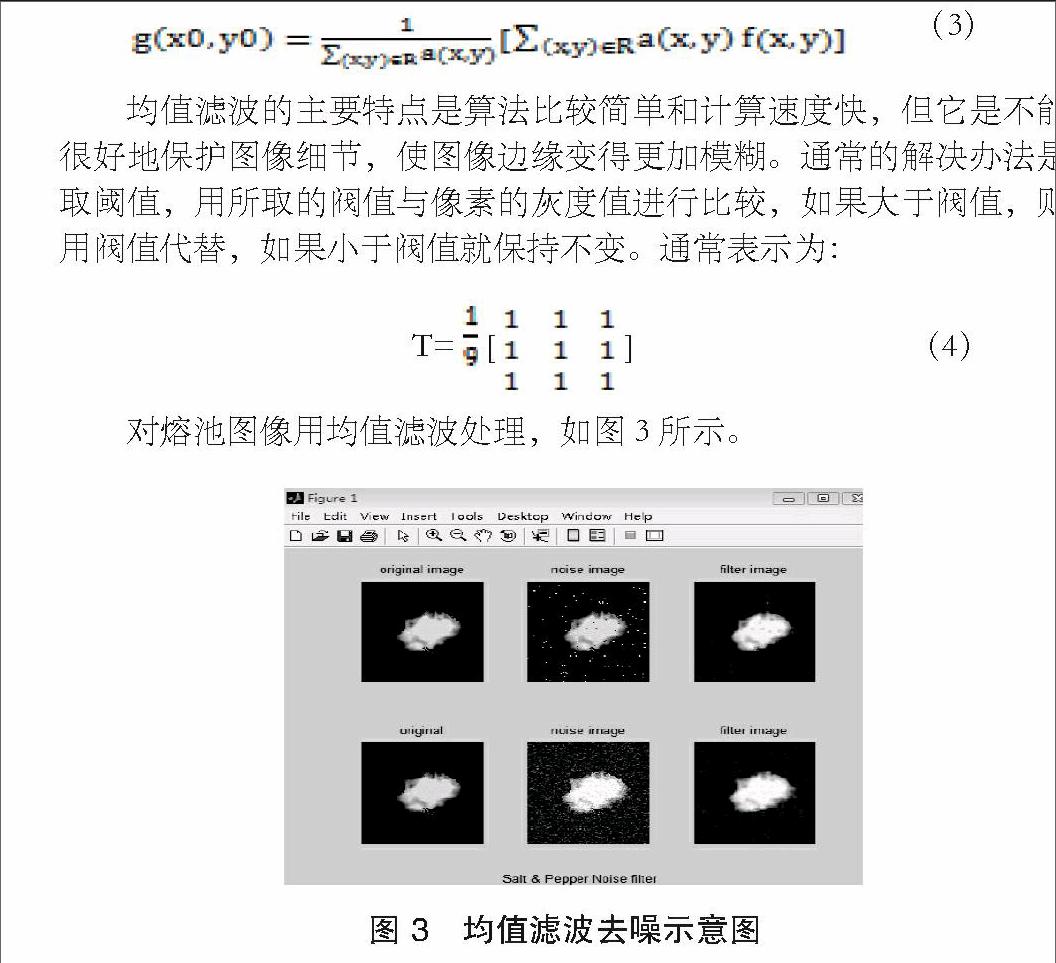
均值滤波的主要特点是算法比较简单和计算速度快,但它是不能很好地保护图像细节,使图像边缘变得更加模糊。通常的解决办法是取阈值,用所取的阀值与像素的灰度值进行比较,如果大于阀值,则用阀值代替,如果小于阀值就保持不变。通常表示为:
对熔池图像用均值滤波处理,如图3所示。
3 熔池图像边缘提取
经过预处理得到的熔池图像仍有少部分被弧光所掩盖,只有提取出完整的熔池边缘,就可以获得较好的熔池形状。
边缘提取的本质思想使离散点连续化。本文用Sobel算子对熔池图像进行边缘检测,其计算公式如下所示:
Tx=[f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Ty=[f(x-1,y+1)+2*f(x,y+1)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x,y-1)+f(x+1,y-1)]
通过计算可知 Sobel 算子卷积模板为:
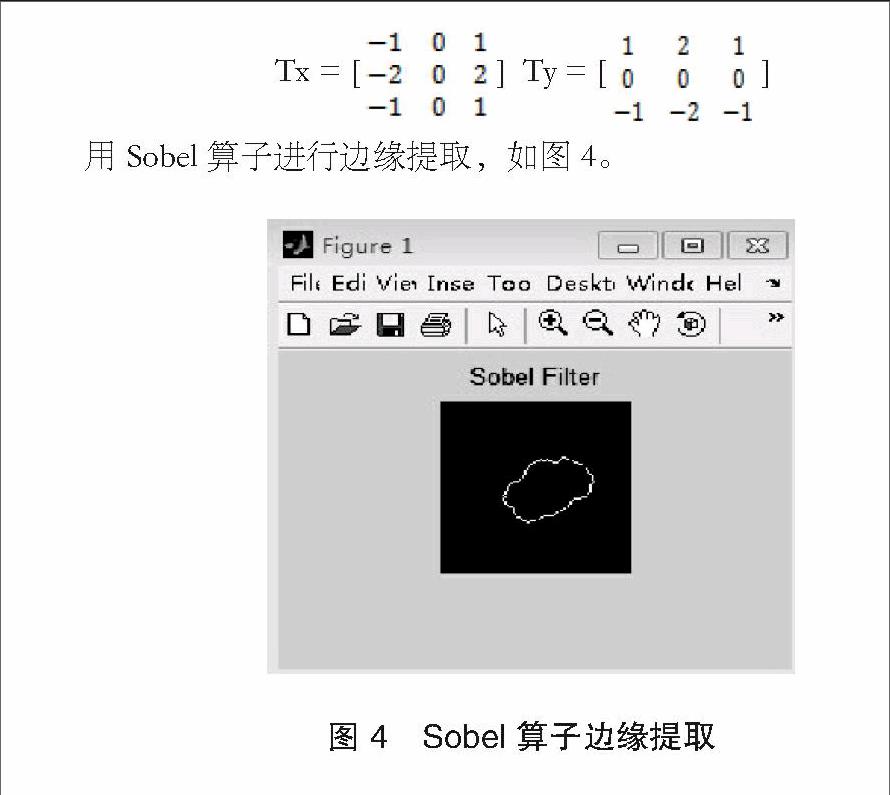
用Sobel算子进行边缘提取,如图4。
4 结论
(1)利用机器人视觉获得到清晰的二氧化碳焊的熔池图像。
(2)将得到的熔池图像利用均值滤波处理,得到我们需要部分。
(3)采用Sobel检测算子对图像进行边缘检测,得到完整的熔池边缘。
参考文献:
[1]刘明涛,高向东,陈建辉等.基于数学形态学的熔池图像处理[J].焊接,2008(05):29-32.
[2]Gao X D,Na S J. Detection of weld position and seam tracking based on Kalman filtering of weld pool images [J]. J.Manuf.Syst.2005,24(01):1-12.
[3]汪岩峰,刘南生,林浩亮等.基于结构光投影的焊接熔池图像获取与处理[J].焊接学报,2008,29(10):81-84.
[4]陈强,孙振国.计算机视觉传感技术在焊接中的应用[J].焊接学报,2001,01(22):83.
[5]刘晓刚,张成锋.二氧化碳保护焊熔池图像增强技术研究[J].轻工科技,2013(01):52-53.
[6]章夔晋.图像处理与分析[J].北京清华大学出版社,2000.
作者简介:刘晓刚(1964-),男,内蒙古包头人,博士,教授,硕士研究生导师,主要从事:焊接机器人方面的科研和教学工作。
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电子测试(2018年6期)2018-05-09
电子测试(2017年11期)2017-12-15
电气化铁道(2016年4期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中央民族大学学报(自然科学版)(2014年1期)2014-06-11