
多功能捡球机器人的研制
2015-12-30 03:15赵艺兵,杨泳雪
组合机床与自动化加工技术 2015年9期
关键词:机械结构
多功能捡球机器人的研制*
赵艺兵a,杨泳雪b
(南京工程学院 a.工业中心;b.自动化学院,南京211167)
摘要:文章介绍了一种基于无线技术的多功能捡球机器人,包含机械结构、遥控电路和障碍检测电路等硬件设计及软件开发。机械结构能够实现捡起直径介于38mm与65mm之间球体;遥控电路基于CMOS大规模集成电路TX-2/RX-2设计,通过手持遥控设备来控制机器人的运动路径;障碍检测电路采用红外传感模块控制机器人自动进行避障检测,对场地目标进行搜寻,并通过机器人来完成捡球动作。该捡球机器人能够捡起高尔夫球、乒乓球、网球等直径介于38mm与65mm之间多种球体,不仅具有手动、遥控及自动搜寻三种捡球模式,而且成本低,可靠性高。通过实物模型的性能测试表明,该捡球机器人捡球效果良好,便于推广应用。
关键词:捡球机器人;机械结构;遥控电路;障碍检测电路
文章编号:1001-2265(2015)09-0129-03
收稿日期:2014-11-11
基金项目:*江苏省自然科学
作者简介:赵艺兵(1966—),男,呼和浩特人,南京工程学院高级实验师,研究方向为机械设计、机器人及数控技术,(E-mail)zdhxzyb@njit.edu.cn。
中图分类号:TH122;TG659
The Development of Multifunctional Robot for Picking up Balls
ZHAO Yi-binga,YANG Yong-xueb
(a.Industry Center; b.Automation Department, Nanjing Institute of Technology, Nanjing 211167, China)
Abstract:In this paper a multifunctional robot for picking up balls based on wireless technology is described. It includes the hardware design such as mechanical structure, remote control circuit and obstacle avoidance circuit as well as the software development. Mechanical structure can achieve to pick the balls which diameters are between 38mm and 65mm; Remote control circuit is designed based on CMOS LSI TX-2/RX-2 and the running path is controlled by hand remote control; Obstacle detection circuit is designed by using the infrared sensor module to control the robot to detect obstacles automatically, search for target sites and pick up balls by the robot. The robot can pick up several balls such as golf, table tennis and tennis. It not only has three picking up balls methods such as hand control,remote control and automatic search, but also has low cost and high reliability. The performance testing on the practical model of the robot shows that the ball picking robot works well and it is easy to popularize and apply.
Key words: robot for picking up balls;mechanical structure;remote control circuit;obstacle detection circuit
0引言
随着机器人技术的发展, 机器人的用途越来越广, 开始从传统的工业领域向军事、医疗、服务等领域渗透。2004年2月25日, 世界第一届机器人会议在日本福冈市落下帷幕, 会议发表了《世界机器人宣言》, 与会代表一致认为:在机器人领域正经历着从产业用机器人时代向生活用机器人时代的转变。2005年1月, 我国863计划先进制造与自动化技术领域办公室和国家自然科学基金会信息科学部联合组织召开了智能服务机器人战略研讨会。近年来, 在国家“863”计划的支持下, 我国在服务机器人研究和产品研发方面已开展了大量工作,并取得了一定的成绩[1-3]。
众所周知,人们在打球,特别是练习打球时,需要捡起大量散落在场地上的球,靠人捡球既累又耗时,因此一些相对高级的球类运动如高尔夫球、网球等会聘请球童捡球。但还有很多球类运动的参与人群雇不起球童,只能自己弯腰拣球[4]。为此已有学者在捡球工具研究方面做出了努力,给出了相关报道,但依然存在不足。例如中国专利号为ZL 201120132476.2的实用新型专利《乒乓球捡球机器人》[5],所采用的技术方案不具备自动捡球功能,而且捡球种类仅限于拾捡乒乓球,中国专利号为ZL 201110046558的发明专利《智能型吸气式自动捡球机器人》所采用的技术方案,不能自动行走,依然需要人工推行[6]。
本文设计的捡球机器人,不仅能捡高尔夫球、乒乓球、网球等多种球,而且具备手动、遥控及自动搜寻三种捡球模式。通过对已设计的捡球机器人模型进行大量实验,证实了该机器人不仅能捡起直径介于38mm与65mm之间球体,而且具有成本低、功能多样、适用范围广等优点,便于推广使用。
1总体方案
该捡球机器人包括具有行走机构的机器人本体及安装在机器人上的捡球机构,其结构示意图见图1所示。机器人本体成箱体状,由两块成十字交叉的隔板和转轴形成滚筒,三块后挡板形成引球板,后轮、滚筒、引球板构成捡球机构,左、右两个驱动电机、车体、前轮、后轮、转轴构成行走机构,为防止机器人后退时球掉出还安装有由活帘和横杆构成的防掉机构。

1.机器人 2.捡球机构 3.箱体 4.5.前轮 6.7. 电机 8.9.后轮 10.转轴
11.12.隔板 13.横杆 14.活帘 15.控制机
图1机器人结构示意图
机器人设计为前轮驱动,即左、右两个前轮连接左、右两个电机,左、右两个电机连接控制机构。机器人运用差速原理实现转向。引球板设在滚筒转动上升方向的一侧,引球板下端位于滚筒下方。机器人行走时通过地面摩擦带动后轮运转,后轮运转会带动滚筒转动。当滚筒中的隔板遇到球体时,球体就会被卷入两块隔板和后挡板构成的相对封闭的空间中,随着机器人向前运行,由转轴的转动将球体推到箱体中,这一过程即完成了捡球。为防止进入箱体后的球体掉出,设置由活帘和横杆构成防掉机构,安装在捡球机构前。控制器由51单片机构成的最小系统、红外开关、遥控电路、电机控制器及手持遥控器等组成。
2机械结构设计
捡球机器人的机械结构核心是由一根长度为360mm的铝合金轴,两块270×170mm的有机玻璃隔板和三块长度为300mm的有机玻璃后挡板构成,如图2所示。捡球机器人的捡球原理是机器人向前运动时,当隔板碰到直径介于38mm与65mm之间的球体且机器人具有一定运行速度,球体就会被置在两块隔板和后挡板构成的相对封闭的空间中,随着机器人的向前运行,由合金轴的转动将球体推到放置小球的箱体中,这一过程即完成了机器人捡球的动作。机器人隔板与最底部的后挡板之间的间距约为5mm,机器人的三视图如图3所示。

图2 捡球机构示意图

图3 捡球机器人的三视图
3硬件设计
3.1遥控电路设计
遥控电路的设计采用CMOS规模集成电路TX-2/RX-2来制作,通过手持遥控设备来控制机器人的运行路径,并通过机器人来完成捡球动作,遥控电路和信号接收电路的原理图分别如图4和5所示。

图4 遥控电路原理图

图5 信号接收电路原理图
3.2障碍检测电路
障碍检测模块的传感器选用红外传感器,其优点是对近距离的障碍物反应速度灵敏,不同方位的传感器之间信号不会相互干扰,造成误动作。其工作原理是,传感器由红外发射端D1发出红外线,如果红外接收端D2接收到反射光,D2端电平被拉低,经过LM741和LM567会输出一个低电平,说明检测到有障碍物。反之,没有检测到障碍物。根据实验要求该红外传感器有效的检测距离为20cm。
STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。为此,障碍检测电路控制器选用STM89C52,其原理图如图6所示。

图6 障碍检测电路控制器原理图
3.3电机驱动模块
电机驱动电路选择L298N双全桥步进电机专用驱动芯片,该芯片内部包含4信道逻辑驱动电路,是一种二相和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号。驱动电路的原理图如图7所示。该电机驱动电路不仅控制方便而且成本低,便于推广。
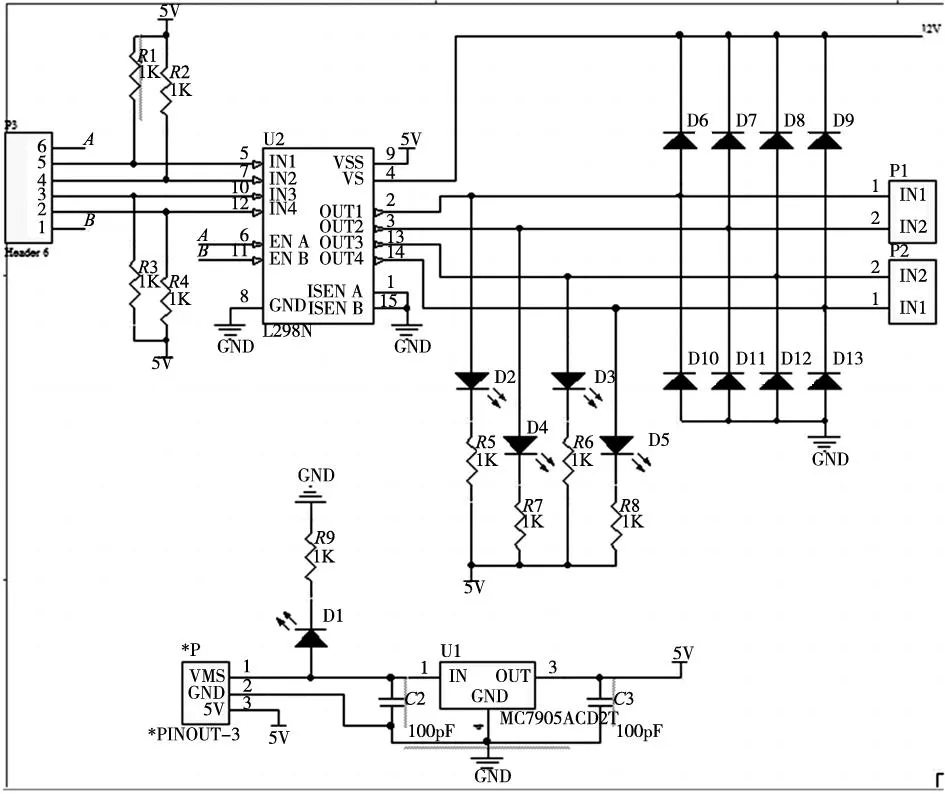
图7 电机驱动电路原理图
4软件编程及实验结果
软件程序包括电机驱动控制、障碍检测程序等,为方便设计及其后续的修改和调整,运用C 语言编写程序[7]。
经过捡球机器人机械结构的设计与控制系统硬件及软件设计,最终完成了多功能捡球机器人样机试制,并进行了功能测试证实了设计方案的正确性。
5结论
研制了一种基于无线技术的多功能捡球机器人,通过对实物模型的测试表明:该捡球机器人不仅能够捡起直径介于38mm与65mm之间的多种小球,而且具有手动、遥控及自动搜寻三种捡球模式,使用灵活性高,与市面上销售的同类产品相比,具有成本低、功能多样、适用范围广等优点,便于在实际中推广使用。
[参考文献]
[1] 袁亮.基于状态估计的服务机器人主动感知系统的研究[J].组合机床与自动化加工技术,2014(5):73-77.
[2] 熊光明, 赵涛, 龚建伟.服务机器人发展综述及若干问题探讨[J].机床与液压,2007,35(13):212-215.
[3] 宋爱国.力觉临场感遥操作机器人技术研究进展[J].机械制造与自动化, 2012,41(1):1-5.
[4] 安丹阳.新型自主式乒乓球捡球机器人的构形及关键技术研究[D].沈阳: 东北大学, 2008.
[5] 乒乓球捡球车[P].实用新型专利,ZL201120132476.2.
[6] 智能型吸气式自动捡球车[P].发明专利,ZL 201110046558.
[7] 钟文胜,陶学恒,卢金石.油烟管道清洗机器人关键技术研究[J].组合机床与自动化加工技术,2013(4):122-124.
(编辑李秀敏)
申请优先审稿须知
为振兴我国机械装备制造业,弘扬民族科学文化精神,提升期刊质量,本刊从即日起,凡是符合本刊报道范围且同时受到“国家863计划资助项目”、“国家自然科学基金资助项目”、“国家重点科技攻关资助项目”等国家级基金资助项目的原创论文,可申请优先审稿,一经录用,优先发表,欢迎业内人事、专家、学者踊跃投稿(来稿注明:“优先审稿”字样)。
注:1.本刊正常审稿时间一般为一个月,优先审稿时间为15-20天;
2.本刊正常发表文章周期为采用后7-10个月,优先发表文章周期为7-9个月。
——本刊编辑部
猜你喜欢
山东工业技术(2016年24期)2017-01-12
佛山陶瓷(2016年12期)2017-01-09
科技传播(2016年19期)2016-12-27
科技与创新(2016年15期)2016-09-23
企业文化·中旬刊(2016年5期)2016-05-16
科技视界(2016年8期)2016-04-05
