束中放疗加速器多叶光栅控制系统设计
2015-12-28 03:40:00杜锡九蒋舸扬陈广花陈建锋沈立人
核技术 2015年9期
杜锡九 蒋舸扬 叶 斌 陈广花 陈建锋 沈立人
1(广东中能加速器科技有限公司 东莞 523000)
2(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
束中放疗加速器多叶光栅控制系统设计
杜锡九1蒋舸扬2叶 斌1陈广花2陈建锋2沈立人2
1(广东中能加速器科技有限公司 东莞 523000)
2(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
多叶光栅是现代医用加速器的重要组成部分之一,其控制系统的稳定性和精确度直接影响手术中病人的生命安全。但目前国内的多叶光栅无论在稳定性还是在精确度上仍与世界先进水平相差甚远。为满足国内一台术中治疗加速器的研发需要,我们在传统多叶光栅控制基础上,利用可编程片上系统(System-on-a-Programmable-Chip, SOPC)技术对多叶光栅控制系统进行了软硬件重构,通过增加功能模块和改善电磁辐射防护等手段,研制了符合术中治疗加速器功能需求和机械安装尺寸的基于现场可编程门阵列(Field-Programmable Gate Array, FPGA)芯片的全新控制系统。经测试,该控制系统功能完善,双路位置反馈可靠性高,测试结果满足国家现行对于多叶光栅系统性能要求,为术中治疗加速器的研制提供了可靠保证。
多叶光栅,粒子加速器,现场可编程门阵列,LabVIEW
多叶光栅(Multi Leaf Collimator, MLC)是精确放疗必须的辅助设备之一,在适形放疗过程中,多叶光栅替代传统挡铅,通过动态调整形成各种不规则的照射野,使每次治疗射束的形状都与病灶区的投影一致,并尽量保护周围正常组织不受照射[1]。传统放疗多采用固定式加速器在肿瘤放射治疗部门带防护屏蔽设计的直线加速器机房进行,随着放疗新技术的发展,一种专门用于术中放疗(Intra-operative Radiation Therapy, IORT)的移动式加速器问世,可以在手术中对未能完全切除肿瘤及周围淋巴结进行一次大剂量照射,以期减少放疗时间和步骤,提高放疗效果[2]。和传统固定式加速器相比,移动式加速器对于多叶光栅移动速度、精度和体积都有着更高的设计要求,传统固定式加速器的多叶光栅控制已经不能满足需要。因此研制满足术中放疗加速器需要的多叶光栅控制系统具有极大的临床价值及现实意义。中国科学院上海应用物理研究所和广东中能加速器有限公司从2009年起致力于术中治疗加速器研究,取得了多项与术中治疗技术相关的具有自主知识产权的科研成果。
本研究是国内第一台术中治疗加速器精确放疗系统的一部分,根据机械安装尺寸需要及控制功能划分,多叶光栅控制系统被划分为主控模块、电机驱动模块及位置监测模块三部分。由三块独立电路实现对应功能,电路板间通过接插件及排线电气连接方便安装。和传统采用单片机控制的多叶光栅控制系统相比,该设计具有如下特点:
(1) 一片672引脚的现场可编程门阵列(Field-Programmable Gate Array, FPGA)芯片替代多块单片机芯片级联才能实现功能,减小电路板尺寸,满足束中治疗加速器多叶光栅机械安装尺寸要求。
(2) FPGA综合及布局布线后产生硬件电路,提高运行速度。
(3) 电机编码器脉冲计数和冗余设计的多叶光栅位置检测模块消除多叶光栅定位错误的可能。
(4) 独立模块设计便于故障诊断,减少设备故障时更换模块的时间和成本。
1 硬件设计
硬件电路系统主要结构如图1所示。其中电机驱动模块采用多路专业电机驱动芯片A3952SB,可同时控制80路直流伺服电机;主控模块采用高性价比Cyclone II FPGA核心,通过符合AVALON总线标准IP核设计,利用NIOSII软核实现多路频率和脉宽可调的脉宽调制(Pulse-Width Modulation, PWM)波形、电机编码器脉冲监测以实现位置反馈及串口/网络通信功能;位置检测模块通过不断检测叶片连接电刷的运动位置,确保叶片移动位置的精确性和可靠性。针对加速器功率源和微波系统可能带来的电磁辐射问题,额外设计了光电隔离保护电路、滤波电路以及电源层分割等技术,使系统更加稳定可靠,符合医疗设备的稳定性要求。

图1 多叶光栅控制系统框图Fig.1 Architecture of multi-leaf collimator control system.
1.1主控模块供电电路
电源的稳定性是整个电路系统能稳定工作的关键。FPGA的工作电压是3.3 V和1.5 V,分别供给FPGA的IO模块和内部模块,SDRAM (Synchronous Dynamic Random Access Memory)和FLASH (Fast Large Area Scan Hardware)的工作电压是3.3 V。从外部引进的5 V直流电源,经过磁珠滤波,最大限度地降低外界对系统电源的干扰。通过稳压器件,将5 V DC转换为系统工作所需的各种电压。电源转换芯片为LT1117和NCP566ST12,其电压和电流参数范围满足系统需求,其中LT1117将5 V外接电源稳压成FPGA、SDRAM和FLASH所需的3.3 V电压,NCP566ST12将LT1117稳压的3.3 V再稳压成1.2 V供FPGA所用。由于整个电源系统比较复杂,电路板设计采用多层PCB (Printed Circuit Board)结构,同时利用电源层分割技术、去耦电容、旁路电容等技术,增加了系统的抗干扰性[3]。
1.2串口/网络通信电路
为满足上层治疗计划系统(Treatment Planning System, TPS)以及调试软件和多叶光栅控制系统的交互,系统基于可靠和高效的原则设计了自定义的通信协议。考虑到多叶光栅安装在旋转治疗头上,通讯距离较长且容易受到射线干扰,同时为避免治疗头内其它高压组件因为误操作带来的高压串扰,宜采用光纤通信替换一般RS232/485电缆以消除干扰及高压隔离。为简化设计,我们采用了市场上较普及且可靠性较高的商业串口/光纤转换模块——台湾MOXA公司的TCF-142-M-ST。实际使用效果表明,系统运行稳定。此外,光纤外皮采用高压硅橡胶包裹,在兼顾柔韧性的同时增强了机械强度。为满足工业控制领域流行的TCP/IP网络接口需求及将来的系统扩展,还设计了网络接口电路,支持以太网通讯。
1.3电机驱动电路
本控制系统的核心是多路电机驱动控制,因此选择一款稳定可靠且价格适中的电机控制芯片尤为重要。经过多方比较和查询相关文献,最终选定了Allegro Micro Systems公司生产的A3952SB作为本次控制系统的电机驱动芯片[4-5]。
A3952是一种全桥式脉宽调制芯片,最高支持50 V的驱动电压,可持续输出2 A的驱动电流。同时它具有内部电路保护,包括因滞后引起的过热关机、电源及充电泵的过压监视及交叉电流保护。芯片控制输入电平为5 V,芯片内部为H桥结构,主要由4个逻辑输入引脚决定它的工作状态:引脚ENABLE使能芯片、引脚PHASE控制芯片的输出极性、引脚MODE决定脉宽调制电路的工作模式(快衰减和慢衰减)、引脚BRAKE实现对电机的制动。当ENABLE和BRAKE同时为高电平时,芯片处于休眠模式,以降低功耗。4个逻辑输入引脚可以组合成多种控制方式。我们采用PHASE引脚作为PWM的输入端,考虑到光栅叶片并非是大惯性系统,并且采用PHASE引脚作为PWM的输入端时,系统本身具有制动的效果,因此将BRAKE引脚和MODE引脚直接接地。电机驱动电路如图2。

图2 电机芯片驱动电路Fig.2 Circuit of A3952SB.
1.4位置检测电路
作为一台医疗仪器的核心组件,可靠性要求较高。因此位置检测电路采用两路冗余的检测反馈机制,一级反馈是电机脉冲反馈,FPGA通过采集电机编码器脉冲计数计算电机的实时位置,同时计算电机的实时速度。高减速比的电机及丝杆带动叶片的结构使得FPGA能够更加精确地计算光栅叶片的位置信息。通过计算,光栅叶片的位置精度能够达到6.7 μm,高于国家检测要求。二级反馈采用电刷反馈,通过光栅叶片的运动带动电刷,FPGA对电刷的位置进行实时检测。电刷的位置采集精度为1mm,二级反馈能够在一级反馈失效或者错误的情况下进行报警,停止加速器出束,保证病人的人身安全。
2 软件设计
对FPGA的开发包括硬件和软件开发两部分。硬件开发在Quartus II中实现,而软件开发部分在NIOS IDE中实现。处理器以软核形式实现,具有高度的灵活性和可配置性。先利用SOPC BUILDER为NIOSII软核定制合适的CPU和外设,然后利用NIOSII IDE环境,采用C编程,完成对FPGA外设的控制及完成对通讯协议的解析。 FPGA通过检测电机编码器回读的实际脉冲数并计算得到真实位置和目标位置的偏差,由AVALON总线控制 PWM IP核输出一定幅值和占空比的PWM波形控制电机实现闭环控制。在此过程中,还需要根据通信协议命令格式,将当前叶片的实时位置数据反馈给上位机。
2.1 PWM IP核设计
PWM模块基于Avalon总线中的Avalon Memory Mapped Interface设计。Avalon-MM接口是内存映射系统下的用于主从设备之间的读写的接口,Avalon-MM最大的特点是可以根据自己的需求自由选择信号线。图3是利用Verilog语言构建的某一路符合Avalon-MM Slave接口规范的可以实现PWM电机控制功能的IP核。Avalon总线定义包括了同步时钟信号、复位信号、片选信号、32位写数据寄存器、32位读数据寄存器、使能控制寄存器、周期设定寄存器以及占空比设置寄存器等。针对80路电机,一共由80个功能相同、引脚不同的PWM模块组成。

图3 PWM IP核设计Fig.3 Design of PWM IP core.
2.2 SOPC BUILDER设计
SOPC BUILDER为NIOSII软核定制了适合的CPU和丰富的外设,包含了SDRAM、EPCS (Erasable programmable configurable serial)、PWM IP核、串口、定时器、基于Avalon-MM定制的计数器接口和丰富的并行输入/输出口,满足了多叶光栅的控制需求。
2.3控制逻辑
NIOSII软核中C程序执行流程如图4所示。
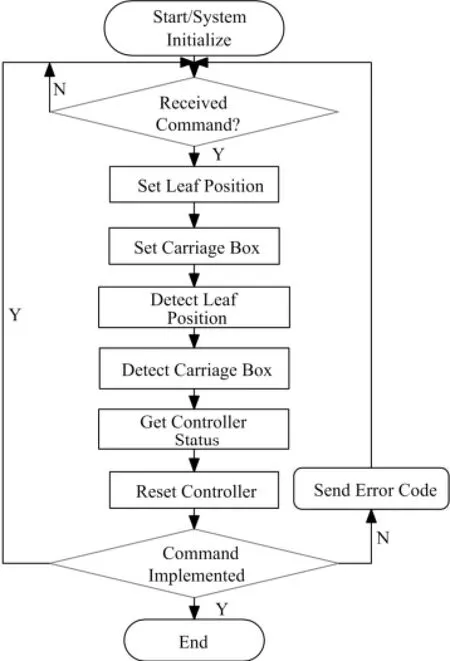
图4 NIOSII软件流程图Fig.4 NIOSII software flow chart.
从图4可以看出,第一次控制器上电初始化时,所有叶片退回到初始化状态,此时控制器处于待机状态,等待接收上位机控制指令。一旦控制器接收到上位机的控制指令,则控制器执行相对应的指令程序。上位机每100 ms查询一次叶片位置、滑槽架位置及控制器状态码,实现上位机对多叶光栅射野的实时跟踪。
3 测试
多叶光栅控制系统最终的运行方式是在治疗计划系统的控制下进行工作。为不受治疗计划软件开发进度影响和调试方便,我们采用LabVIEW编写了上位机控制程序模拟TPS系统的光栅控制功能模块对叶片的运动和位置反馈进行测试[6]。
图5(a)界面是光栅实时回读的数据,包含了数字显示的叶片实时位置、条状显示的叶片实时位置及控制器其它回读状态,用户也可以直接输入符合多叶光栅自定义规范的其它通讯指令和控制器进行交互。
为进一步方便调试,图5(b)采用了基于“傻瓜式”设计,多个按钮及选值框隐藏了上位机对多叶光栅的控制指令(状态查询指令、位置设置指令、故障查询指令、位置查询指令等),用户不需要了解通讯协议格式,只需通过直接点击按钮即可完成对多叶光栅的位置和运动控制。光栅的位置和状态数据则在图5(a)中实时显示。
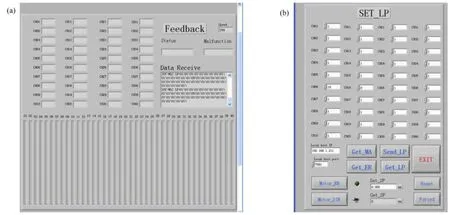
图5 LabVIEW监控程序界面(a) 多叶光栅监控界面;(b) 多叶光栅控制界面Fig.5 Graphical user interface of LabVIEW control and monitor program.(a) MLC monitor program; (b) MLC control program
在完成多叶光栅控制系统的整体设计后,将控制系统组件和多叶光栅安装连接到O-MAX系列术中治疗加速器整机上进行实际运行和测试,测试采用国标GB 15213-94为参考标准[7]。测试主要内容包括:
(1) 功能测试,通过上位机测试软件模拟TPS治疗系统进行远程控制,验证通讯协议可靠性。
(2) 受控状态下多叶光栅运行参数测量,通过机械测量如游标卡尺和出束拍片等手段获得。
(3) 长时间稳定性测试,为期一个月。
在线测试过程中,我们通过在LabVIEW程序中增加的叶片位置随机数产生模块控制多叶光栅不间断运行,整个测试周期中,系统运行稳定,未发生功能性错误。而实际使用过程中,多叶光栅只在患者开始摆位时进行运动定位,使用频率和时间远小于测试条件。此外,通过100次对多叶光栅系统进行整体测试,经出束拍片得到的多叶光栅性能参数如表1所示[8]。
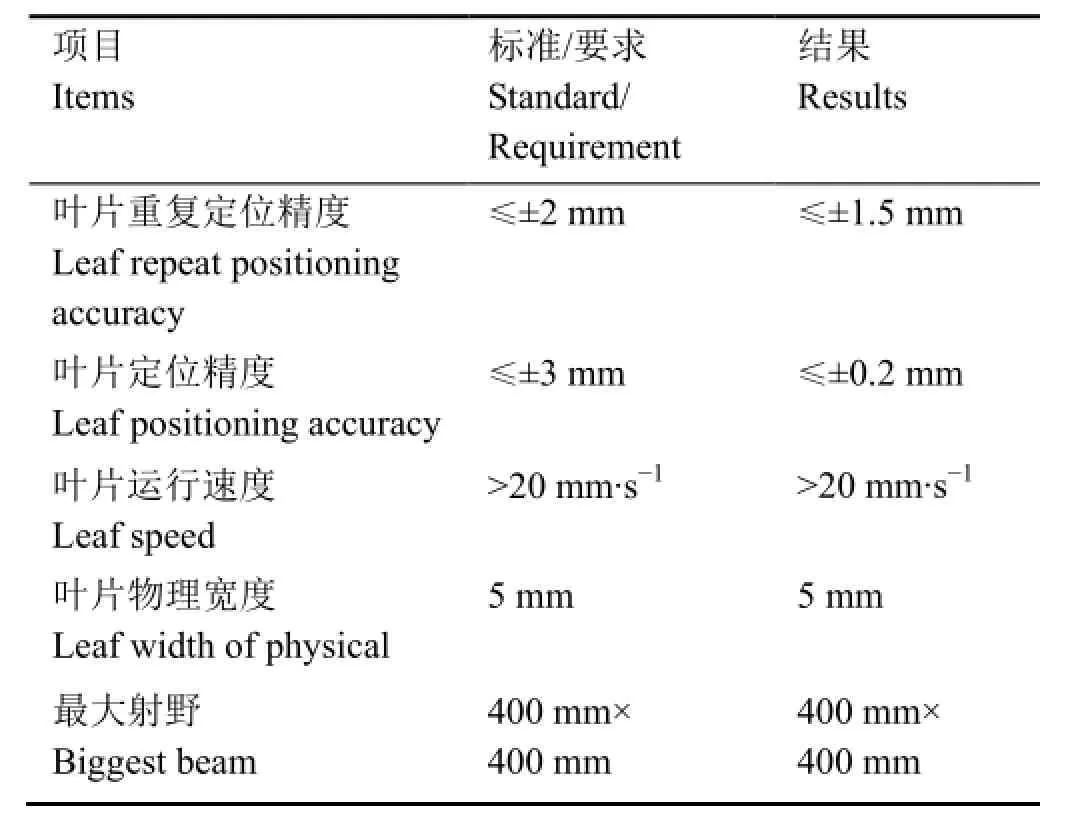
表1 多叶光栅性能参数Table1 MLC performance parameters.
4 结语
从测试结果可以看出,本系统结构可靠,配合上位机调试软件,操作人员可直观地对多叶光栅进行控制和定位,稳定性和精度各项指标满足了术中治疗加速器运行需要,达到了预期设计的目标。
1 胡逸民. 肿瘤放射物理学[M]. 北京: 原子能出版社, 1999: 26-267
HU Yimin. The tumor radiation physics[M]. Beijing: Atomic Energy Press, 1999: 26-267
2 Ralph R, Dobelbauer Jr. Intraoperative radiation therapy[M]. USA: CRC Press Inc, 1989: 167-169
3 Linear Technology. LT1117-3.3 datasheet[EB/OL]. http://www.linear.com/, 2012-12-2
4 Allegro MicroSystems. A3952SB datasheet[EB/OL]. http://www.allegromicro.com, 2011-2-5
5 张莉, 冉蜀阳, 吴章文, 等. 基于LabWindows/CVI的PC机与多叶光栅控制系统的串行通信[J]. 四川大学学报(自然科学版), 2009,46(3): 629-634. DOI: 0490-6756 (2009)03-0629-06
ZHANG Li, RAN Shuyang, WU Zhangwen, et al. The serial communication between PC and multi leaf collimator control system based on LabWindows/CVI[J]. Journal of Sichuan University (Natural Science Edition), 2009,46(3): 629-634. DOI: 0490-6756(2009)03-0629-06
6 GB 15213-94, 医用电子加速器性能和试验方法[S]. 北京: 国家技术监督局, 1994 GB 15213-94, Medical electron accelerators-functional performance characteristics and test methods[S]. Beijing: State Bureau of Quality and Technical Supervision, 1994
7 张培仁, 都改欣, 卿志远, 等. 用DSP及脉宽调制驱动芯片A3952控制倒立摆[J]. 电子技术, 2002,29(1): 57-60. DOI: 10.3969/j.issn.1000-0755.2002.01.020
ZHANG Peiren, DU Gaixin, QING Zhiyuan, et al. Application of DSP and PWM driver A3952 in inverted pendulum control[J]. Electronic Technology, 2002,29(1): 57-60. DOI: 10.3969/j.issn.1000-0755.2002.01.020
8 黄文峰. 多叶光栅(MLC)的设计与研究[J]. 机电工程技术, 2007,36(9): 85-88. DOI: 1009-9492(2007)09-0085-04
HUANG Wenfeng. Study and design for multi leaf collimator (MLC)[J]. Mechanical & Electrical Engineering Technology, 2007,36(9): 85-88. DOI: 1009-9492(2007)09-0085-04
Design of MLC’s control system for IORT accelerators
DU Xijiu1JIANG Geyang2YE Bin1CHEN Guanghua2CHEN Jianfeng2SHEN Liren2
1(SinoPower Accelerator Co.,Ltd.,Dongguan 523000,China)
2(Shanghai Institute of Applied Physics,Chinese Academy of Sciences,Jiading Campus,Shanghai 201800,China)
Background:The multi-leaf collimator (MLC) is one of key components of modern medical accelerators for Intra-operative Radiation Therapy (IORT). The stability and accuracy of MLC’s control system will insure patients’ life security during radiation therapy. Comparing with the world’s top level, domestic MLC technologies falls behind not only in stability but also in accuracy.Purpose:This study aims to design a MLC control system satisfying the requirements of developing the first domestic IORT accelerator and closing the gap with the world advanced level.Methods:The MLC control system was reconfigurated by the System-on-a-Programmable-Chip (SOPC) technique based on the traditional MLC control system. By adding new function model, preventing Electromagnetic Interference (EMI) and other ways, the newly developed MLC control system can fulfill IORT accelerator’s function and mechanical installation requirements.Results and Conclusion:The test results show that the control system possess properties of full functionalities, redundant position feedback, conformity to national standards of medical instruments and insuring the R&D of IORT accelerator.
MLC, Accelerator, FPGA, LabVIEW
TL99
10.11889/j.0253-3219.2015.hjs.38.090502
广东省引进创新科研团队计划(No.201001D0104732255)资助
杜锡九,男,1943年出生,1966年毕业于南京大学,中国科学院高能物理研究所研究员,广东中能加速器科技有限公司民用电子加
速器研发及产业化创新团队核心人员
蒋舸扬,E-mail: marco_hair@163.com
2015-06-09,
2015-06-26
CLCTL99
猜你喜欢
故事作文·高年级(2024年5期)2024-06-04 23:39:22
高中数理化(2024年8期)2024-04-24 16:58:14
少先队活动(2021年6期)2021-07-22 08:44:24
发明与创新(2016年23期)2016-10-13 02:16:14
高师理科学刊(2016年8期)2016-06-15 20:27:46
少年博览·小学低年级(2016年5期)2016-05-14 11:59:03
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
河南科技(2014年10期)2014-02-27 14:09:18
物理与工程(2014年4期)2014-02-27 11:23:08