
利用高精度DSM数据提取建筑物轮廓算法研究
2015-12-26 06:15:06马红
测绘通报 2015年4期
关键词:特征提取
引文格式: 马红. 利用高精度DSM数据提取建筑物轮廓算法研究[J].测绘通报,2015(4):111-113.DOI:10.13474/j.cnki.11-2246.2015.0124
利用高精度DSM数据提取建筑物轮廓算法研究
马红
(重庆市勘测院,重庆 400020)
ResearchonAlgorithmforBuildingOutlineExtractionBasedon
High-precisionDSMData
MAHong
摘要:基于DSM数据提取建筑物轮廓信息是快速自动构建建筑物三维模型的基础和前提。本文将随机抽样一致性算法RANSAC引入到DSM点云分割中,提出了一种基于随机抽样一致性算法模型的建筑物面片识别和轮廓提取算法,实现了高精度DSM数据的建筑物轮廓信息提取,试验验证了本文方法的精度和可靠性。
关键词:DSM;建筑物轮廓;RANSAC;特征提取
中图分类号:P208
收稿日期:2014-03-28
基金项目:“十二五”国家科技支撑计划(2011BAH12B07-03)
作者简介:马红(1987—),女,硕士,工程师,主要从事遥感影像处理和应用研究以及空间数据挖掘工作。E-mail:690573582@qq.com
一、引言
随着车载导航系统、位置服务需求的不断增长和数字城市、智慧城市的快速发展,快速高效的建筑物三维模型重建技术已逐渐成为当前研究热点[1]。三维建筑模型作为三维城市模型的主体内容,其目前的生产方式主要是利用建模软件(如3DMax等)手工建模,工作强度大、生产成本高;其高程数据来源主要包括地形图和楼层、航空摄影测量数据以及竣工测量数据等[2]。由于数据源多样化和现势性差异的影响,建筑物三维模型的高程精度并不准确,导致其应用受到限制,尤其在城市规划领域几乎无用武之地。
考虑到高精度的DSM包含了建筑物的平面轮廓范围和高程信息,因此可以利用高精度的DSM数据提取建筑物的轮廓和高程[3-4]。对DSM数据采用一定的准则进行处理,就可以将建筑物和其他非建筑物分离。几年来,国内外很多学者对建筑物三维重建方法进行了大量的研究,如Vosselman等利用Hough变换处理LiDAR点云数据并结合地平面信息来提取建筑物[5];Miche等采用区域增长方法处理LiDAR点云数据提取建筑物[5];GuoTao等利用LiDAR数据提取DEM,再利用DEM和LiDAR数据得到正则化的DSM,最后通过分割DSM提取建筑物[6];穆超等利用高分辨率遥感影像和DSM数据组合分类提取建筑物轮廓[7]。为了充分利用现有影像处理系统的强大并行计算能力,本文采用像素工厂DSM编辑器自动生成高精度的DSM数据,并引入计算机视觉中具有强鲁棒性消除错误点的RANSAC模型来提取建筑物轮廓信息[8]。
二、基于RANSAC模型的建筑物高程信息提取
随机抽样一致性算法(randomsampleconsensus,RANSAC)是由Fishier和Bolles提出[9],它是一种从数据集合中迭代估计模型参数(模型拟合)的方法,通过随机取样剔除局外点的影响,构建一个仅由局内点数据组成的基本子集。在进行参数估计时,并不是不加区分地对待所有的输入数据,而是首先设计一个判断准则,利用此准则迭代剔除那些与所估计的参数不一致的输入数据(即局外点),然后通过正确的输入数据来估计参数[10-11]。它要求保证在一定的置信概率下,基本子集最小抽样数N与一个良性抽样子集的概率P(P>ε)满足如下关系
P=1-(1-1×(1-ε)d)N
(1)
式中,ε为数据错误率;d为计算模型参数需要的最小数据量。
作为一种稳健的估计算法,RANSAC在模型选择、影像匹配等领域内应用较为广泛[10]。Bauer等在利用立体像对进行城市建筑物三维重建时,结合RANSAC方法对建筑物进行立面提取,极大地提高了三维重建的效率[12]。本文将RANSAC模型引入到DSM点云数据中提取建筑物轮廓信息,实现步骤如图1所示。

图1 基于RANSAC模型的建筑物高程信息提取流程
具体步骤如下:
1) 随机选择原始输入数据中的一个子集,并认为该子集是一个只包含局内点的集合,通过该子集数据解算模型参数。
2) 测试完整数据集中剩余点是否符合此参数模型,如果符合,则这些点是局内点;否则为局外点。
3)如果符合该模型的局内点数达到所设定的阈值,即认为该模型估计正确,根据所有局内点来精确计算模型参数。
4) 如果符合该模型的局内点数没有达到所设定的阈值,那么可能存在一个包含更多局内点和更高精度的模型,因此重复执行上述步骤,直到最终确定最优的模型参数。
5) 根据最优的模型参数,提取建筑物屋顶轮廓,输出提取结果。
在处理过程中,N表示构建模型所需要的最小数据,k用以判断输入点坐标是否符合模型的阈值参数,M用以判定模型是否为更有效的最小样本数,t表示RANSAC模型迭代的次数。在计算过程中,将建筑物屋顶视为平面,只需要3个点即可以确定其参数,故N=3。假定所选取的点都是局内点的概率为P0,若都是局内点的模型可能为最优模型;再假定每次选取到局内点的概率为P,则可以得到如下关系
(2)
式中,M1为输入数据中的局内点个数;M为输入点云数据的总个数。
分析输入数据和试验区的特性,可以给P赋一个近似值。设PN为每次选择都选中局内点的概率,则至少有一次选中局外点的概率为1-PN,因此在t次迭代计算过程中出现错误的概率Pt满足如下公式
Pt=(1-PN)t
(3)
由于Pt等于1-P0,故对式(3)两边求取对数,有下式成立
(4)
根据式(4),如果选定某点后,该点在后续的选取过程中有可能会被重复选中,如此推导出的t值是选取不重复点的上限。故使用其标准偏差进行估计比简单的t值更可信,则t的标准偏差
(5)
三、试验与分析
1. 试验及结果
本文利用像素工厂DSM编辑器生成高精度DSM数据,空间分辨率为0.4m。选取的试验数据覆盖面积约1km2。本研究在像素工厂中完成了DSM点云数据的生成,并利用双线性内插方法对DSM数据作了内插处理,消除了零值区域对提取结果的影响。利用IDL语言完成了本文算法的程序开发,基于ENVI5.0平台实现了本文方法试验。
首先载入试验数据,如图2所示。其中,图2(a)为试验区域的DOM影像,图2(b)为试验区域的DSM点云数据。
由DOM影像可以看出,试验区域内建筑物林立密集且面积较大,因此,对应图1提取流程中的参数k、M,取值k=0.8,M=60。采用本文方法遍历处理后,识别出的建筑物轮廓如图3所示。
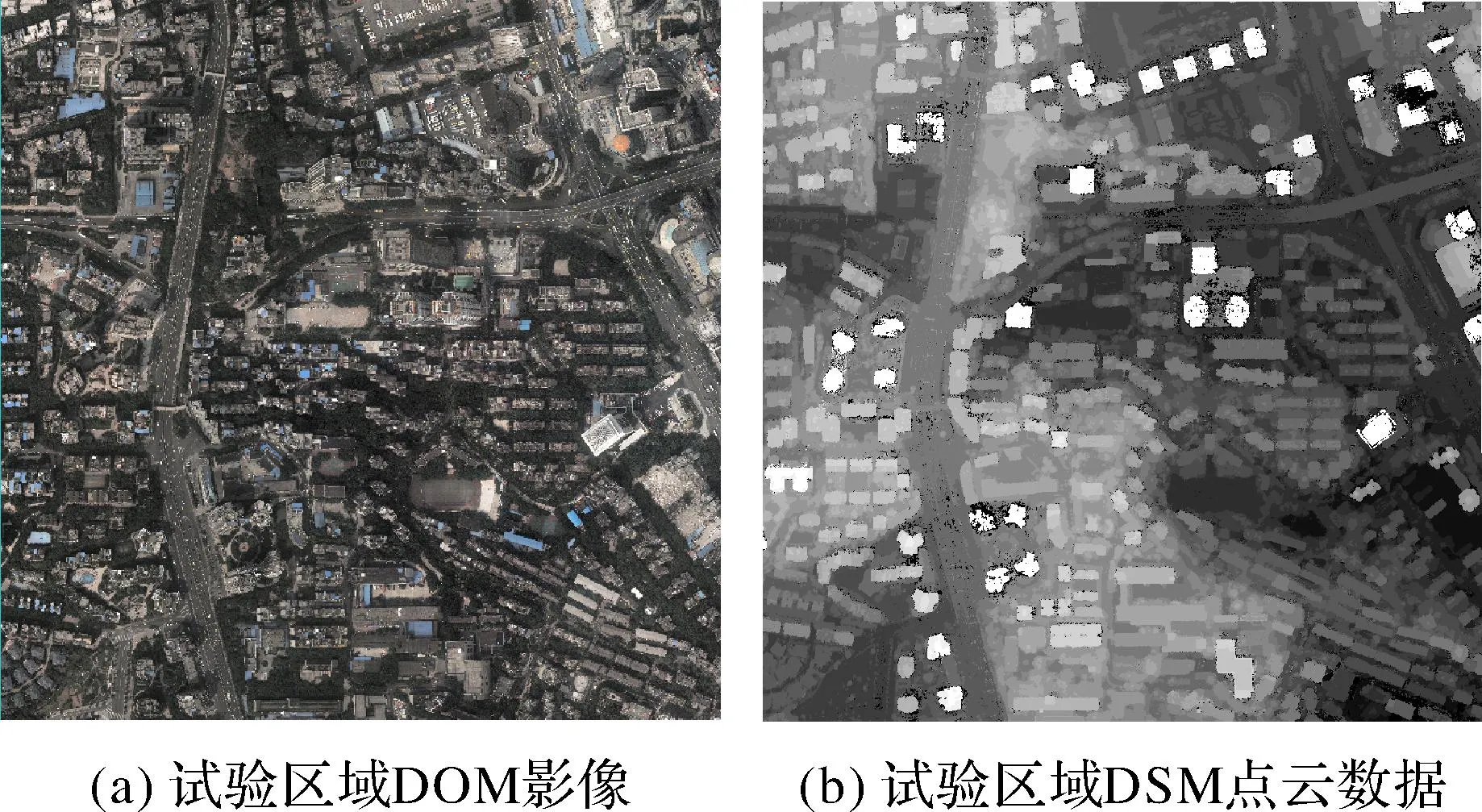
图2 某地区试验数据
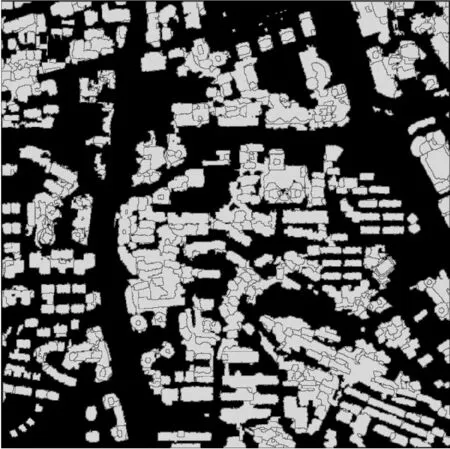
图3 RANSAC模型提取后的建筑物轮廓信息
2. 精度分析
精度分析通常采用更高精度的数据验证或实地测量方式完成。本文从试验区域1∶500数字地形图上提取建筑物信息进行精度验证。利用1∶500的数字线划图(2006—2009年生产,数据格式为MicroStationV8DGN)进行建筑物矢量提取,通过接边、合并、构面等处理,可以得到较为精确的建筑物轮廓。再将该轮廓数据进行坐标转换处理,使其与DSM提取的建筑轮廓信息在同一坐标系下,并将本文提取的轮廓与1∶500数字地形图中提取的建筑物轮廓进行叠加套合,套合结果如图4所示。

图4 1∶500数字线划图中建筑物轮廓与本文方法提取轮廓套合
通过图4的套合结果可以看出,本文方法提取的建筑物轮廓信息基本能够与1∶500地形图上提取的建筑物轮廓套合,排除坐标转换存在的误差和DSM生成误差(即前期空三加密误差)的影响,利用本文方法提取的建筑物轮廓整体精度能够满足后期使用的要求。
四、结束语
本文主要针对高精度DSM点云数据处理过程中建筑物轮廓信息提取进行了研究,提出了一种基于RANSAC模型的建筑物轮廓特征提取方法,且通过试验证明了本文方法可以从高精度DSM点云数据中准确提取建筑物轮廓信息,并将1∶500数字线划图中提取建筑物轮廓信息与本文方法提取结果进行了叠加比对。比对结果证明本文方法提取的建筑物轮廓信息比较准确,能够满足后期三维城市仿真建模和城市用地信息变化检测等方面的工作需要。
本文算法在处理DSM点云数据时,仅对DSM数据作了内插处理,消除了无值区对结果的影响,在下一步的研究中将结合测区的机载LiDAR数据、高分辨率光学卫星影像和高分辨率SAR影像等进行多源数据融合处理,实现建筑物轮廓的精确提取和快速建模,以提高实际建模的生产效率、降低生产成本。
参考文献:
[1]曹敏,史照良,沈泉飞.基于高精度DSM的建筑物三维几何模型构建[J].测绘通报,2011(10):20-22.
[2]穆利娜,李发红.城市DSM的获取技术与应用[J].陕西师范大学学报,2008(6):224-227.
[3]汪燕琴,李光耀,卫靖杰,等.基于数字高程模型的建筑物自动提取算法研究[J].计算机工程与应用,2008,30(44):243-245.
[4]周晓明.基于像素工厂产品提取建筑物矢量轮廓方法的研究与实践[D].郑州:信息工程大学,2008.
[5]VOSSELMANG,DJIMKANS. 3DBuildingModelReconstructionfromPointCloudsandGroundPlans[J].InternationalArchivesofPhotogrammetryandRemoteSensing,2001, 34(3/VV4): 37-44.
[6]GUOT,YASUOKAY.CombiningHighResolutionSatelliteImageryandAirborneLaserScanningDataforGeneratingBareLandandDEMinUrbanAreas[D].Kunming:[s.n.],2002.
[7]穆超,余洁,许磊,等. 基于高分辨率遥感影像的DSM建筑物点的提取研究[J]. 武汉大学学报:信息科学版,2009,34(4): 414-417.
[8]姚达,周军,薛质. 计算机视觉中强鲁棒性的遗传一致性估计[J].计算机工程,2011,37(20): 183-185.
[9]FISCHLER M A, BOLLES B C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[J]. Communications of the ACM, 1981, 24(6): 381-395.
[10]LEE J S, GRUNES M R, SCHULER D L, et al. Scattering-model—based Speckle Filtering of Polarimetric SAR Data[J]. Transactions on Geoscience and Remote Sensing, 2006, 44(1): 176-187.
[11]王植,李清泉. 一种基于机载LiDAR 和离散曲率的建筑物三维重建方法[J].地理与地理信息科学,2009,25(1): 44-48.
[12]YAMAGUCHI Y, MORIYAMA T, YAMADA H. Four-Component Scattering Model for Polarimetric SAR Image Decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(8): 1699-1706.
猜你喜欢
电子制作(2019年15期)2019-08-27 01:12:00
电子制作(2018年19期)2018-11-14 02:37:08
自动化学报(2017年11期)2017-04-04 02:52:58
中国生物医学工程学报(2017年6期)2017-02-10 05:11:45
广西科技大学学报(2016年1期)2016-06-22 13:10:38
计算机工程(2015年4期)2015-07-05 08:28:02
制造技术与机床(2015年10期)2015-04-09 07:05:52
机电信息(2015年3期)2015-02-27 15:54:46
机械工程师(2015年10期)2015-02-02 01:13:49
噪声与振动控制(2015年4期)2015-01-01 07:08:21
