具有水力联系的水电机组自适应模糊控制器
2015-12-24 07:29殷玉杰,刘双林
中国水能及电气化 2015年2期
具有水力联系的水电机组自适应模糊控制器
殷玉杰, 刘双林
(吉林省水文水资源局, 长春130012)
摘要:本文根据非线性条件下具有水力内联的水电机组特点,建立了非线性动态模型并设计了自适应模糊控制器。模型可较好地表达具有水力联系机组的可建模与不易建模特性;自适应模糊控制器专门用于几台机组共用一条压力引水管道水电厂的现地控制系统,在机组正常运行时可以保证其稳定,在任一台机组导叶开度急剧变化时能对另一台机组的状态进行补偿;并行运算方式可以使控制器取代数台独立分布于每台机组的常规PID水轮机调速器,从而为现代化水电厂控制提供一种新的解决方案。根据实际电厂的数据进行仿真,结果验证了自适应模糊控制器的有效性。
关键词:水电机组;水力内联;自适应模糊控制器;非线性控制
中图分类号:TP273+.4
Hydropower Unit Self-adaptive Fuzzy Controller with
Hydraulic Connection
YIN Yu-jie, LIU Shuang-lin
(JilinHydrologyandWaterResourcesBureau,Changchun130012,China)
Abstract:In the paper, nonlinear dynamic model is established, and self-adaptive fuzzy controller based on hydropower unit characteristics with hydraulic connection under nonlinear condition is designed. Modeling and difficult modeling features of hydraulic connection unit can be better expressed by the model. Self-adaptive fuzzy controller is specially used for site control system of hydraopower plant that several units share one pressure water diversion pipeline. Its stability can be ensured during normal operation of unit. State of another unit can be compensated when any one unit guide vane openness is abruptly changed. Parallel operation mode makes controller to replace several conventional PID turbine speed governors which are independently distributed in each unit, thereby providing a new solution for modern hydropower plant control. Stimulation can be conducted according to actual data of power plant. The effectiveness of self-adaptive fuzzy controller is verified in the result.
Keywords:hydropower unit; hydraulic connection; self-adaptive fuzzy controller; nonlinear control
1概述
多台机组共用一条引水管道的电站,可能会出现“内联扰动问题”。如果在设计和调整水轮机调速器参数时不考虑水力联系,必然会产生永久波动误差,从而引起水电厂不稳定以及电网抖动[1,2]。因此,对此类问题的研究具有重要意义。
本文首先建立了两台具有水力联系机组的非线性动态模型,其次在模型的基础上设计了自适应模糊控制器。模型可以较好地表达具有水力联系机组的可建模与不易建模特性;自适应模糊控制器专门用于几台机组共用一条压力引水管道水电厂的现地控制系统,在机组正常运行时可以保证其稳定,在任一台机组导叶开度急剧变化时能对另一台机组的状态进行补偿。根据实际电厂的数据进行仿真,结果验证了所设计自适应模糊控制器的有效性。
2水力机组的非线性动态模型
多台具有水力联系机组的布置如图1所示。
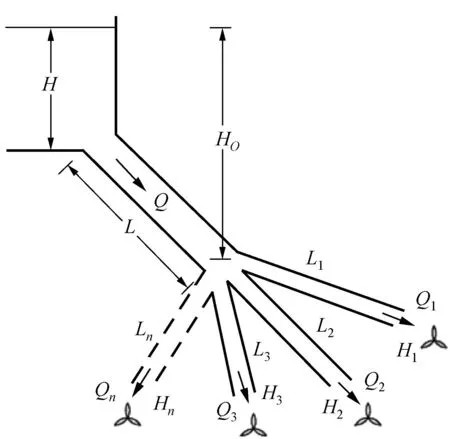
图1 多台具有水力联系机组的布置图
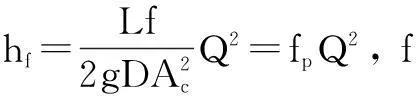
根据牛顿运动定律可以导出下式:
(1)
不考虑流量损失,即Q=Q1+Q2+…+Qn(n为机组的台数),依据式(1),有
(2)
对每段压力管道应用(1)式,则
(3)

由式(2)、式(3)得
(4)

式(4)说明分叉管内的作用水头与管道特性、压力管道特性以及具有水力联系机组的内联特性有关。
每台机组的输出功率为
(5)
式中ρ——流体密度;
ηT——水轮机效率修正值;
考虑环境对流体密度和温度的影响δ以及速度波动的影响PΩ,则式(5)可表达为
(6)
式中Qnl——每台机组无负荷时的流量。
发电机组运动方程为
(7)
根据上述诸式,以两台机组为对象,建立具有水力联系水电机组的动态非线性模型,如图2所示。
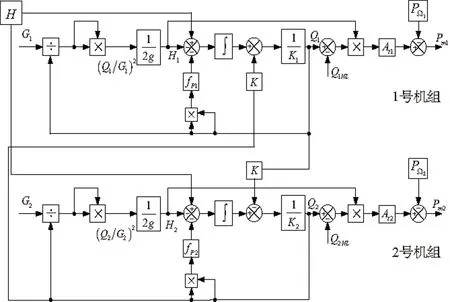
图2 具有水力联系的两台机组动态非线性模型
3自适应模糊控制器设计
模糊控制方法是解决系统非线性控制的有效方法之一[3,4]。本节研究了一种自适应模糊控制器,专门用于几台机组共用一条压力引水管道水电厂的现地控制系统,可以同时控制几台非线性工况下具有水力联系的水电机组。
3.1模糊专家知识
用于模糊控制器设计的专家知识表述如下:
a.两台水力联系机组的模糊控制器要包含两个并行运行的模糊规则基,它们分别对应各自机组的调节控制。
b.应保证在任何电网负荷以及任何管道内的水流条件下机组的转速稳定和恒定。
c.负荷的变动引起机组出力和负荷之间的偏差。
d.当甩负荷或紧急停机时,过水流道必须及时关闭,相应的机组转速上升和管道内的压力升高要在允许值范围内。
e.当频率快速波动时,调速器采取高调节,频率变化较慢和稳态时,调速器采取低调节。
f.水力暂态包含调整参数变化、对水轮机负荷需求的变化、水库水位的变化、水轮机调速器调整。
g.控制系统应迅速响应每台机组的负荷要求并补偿由于邻近机组的水力联系引起的偏差,使每台机组迅速达到各自的稳态。
3.2模糊控制器的输入和输出
模糊控制器的8个输入和4个输出分为两个集合。一个集合对应一台机组。每个集合输入信号为:出力偏差信号、频率偏差信号、导叶位置信号、导叶开度变化率信号。输出信号为:导叶控制信号、导叶控制增量。
3.3控制策略
为与实际运行中的问题相符,选择以下两个工况讨论控制策略。
3.3.1 正常运行
正常运行时,系统通过检验出力偏差信号迅速响应负荷要求,此时会暂时忽略频率偏差信号直到达到每台机组的运行区。每台机组要通过调整导叶开度尽快达到负荷要求,直到出力偏差接近于设定值,每台机组的临界运行区将总是由±5%出力偏差裕量标定的区域。此时如果有频差信号存在,模糊控制器将持续调节保持每台机组在最优运行区内运行或摆动完成频率调节,此时被控制过程是稳定的。
3.3.2 水力联系补偿
由于在开、停机过程中机组间的水力联系、机组运行工况点的大变化、机组负荷的急速变化等因素都可能使转速产生很大偏差,因此需要用一个前馈误差补偿器来迅速补偿由于导叶开度急剧变化引起的偏差。为检测导叶开度的急剧变化,在模糊控制器中引入每台机组的导叶开度变化率信号以及当前导叶开度信号。只要任一台机组的导叶开度发生急剧变化,模糊控制器就会迅速发出补偿信号(前馈)给邻近的机组,从而调节机组达到稳态。
4仿真实例
4.1水力联系机组特性
两台具有水力联系的机组模型如图2所示,采用某电厂机组的实际数据作为仿真实例,数据见下表。

具有水力联系的两台机组仿真数据表
根据图2建立的具有水力联系水电机组的动态非线性模型,在Simulink环境下进行仿真。设1号机组起始开度为10%,并在5s处导叶开度由10%跳变到50%,而在此过程中2号机组始终保持50%的开度,仿真结果如下页图3所示。
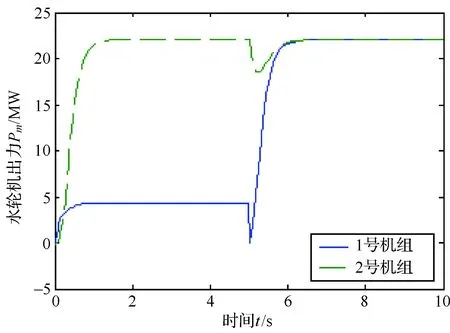
图3 两台水力联系机组仿真结果
图3的仿真结果说明:当数台具有水力联系机组中的一台机组导叶开度发生变化时,将引起其他与之有水力联系机组的水头(出力)迅速增加或减少。相应机组的控制系统将调节各自的导叶开度,如此可能重新影响其他水力联系机组。如果在控制器的设计中不考虑上述作用,则会使整个水电厂相互联系的机组运行出现不稳定。
4.2自适应模糊控制器特性
由3.3的控制策略可知:出力偏差信号的比例因子由-100%到+100%。其隶属函数由在中间表示运行区“OZ”的三个高斯型隶属函数构成。频差信号比例因子由-5%到+5%,正常运行时,由自适应模糊控制算法可以得到模糊控制器输入量调整前后的隶属函数曲线,如图4、图5所示。下页图8中t=0~5s间的曲线为正常运行时的控制结果。当扰动发生后则无补偿作用的控制结果,如图8中的虚线所示。
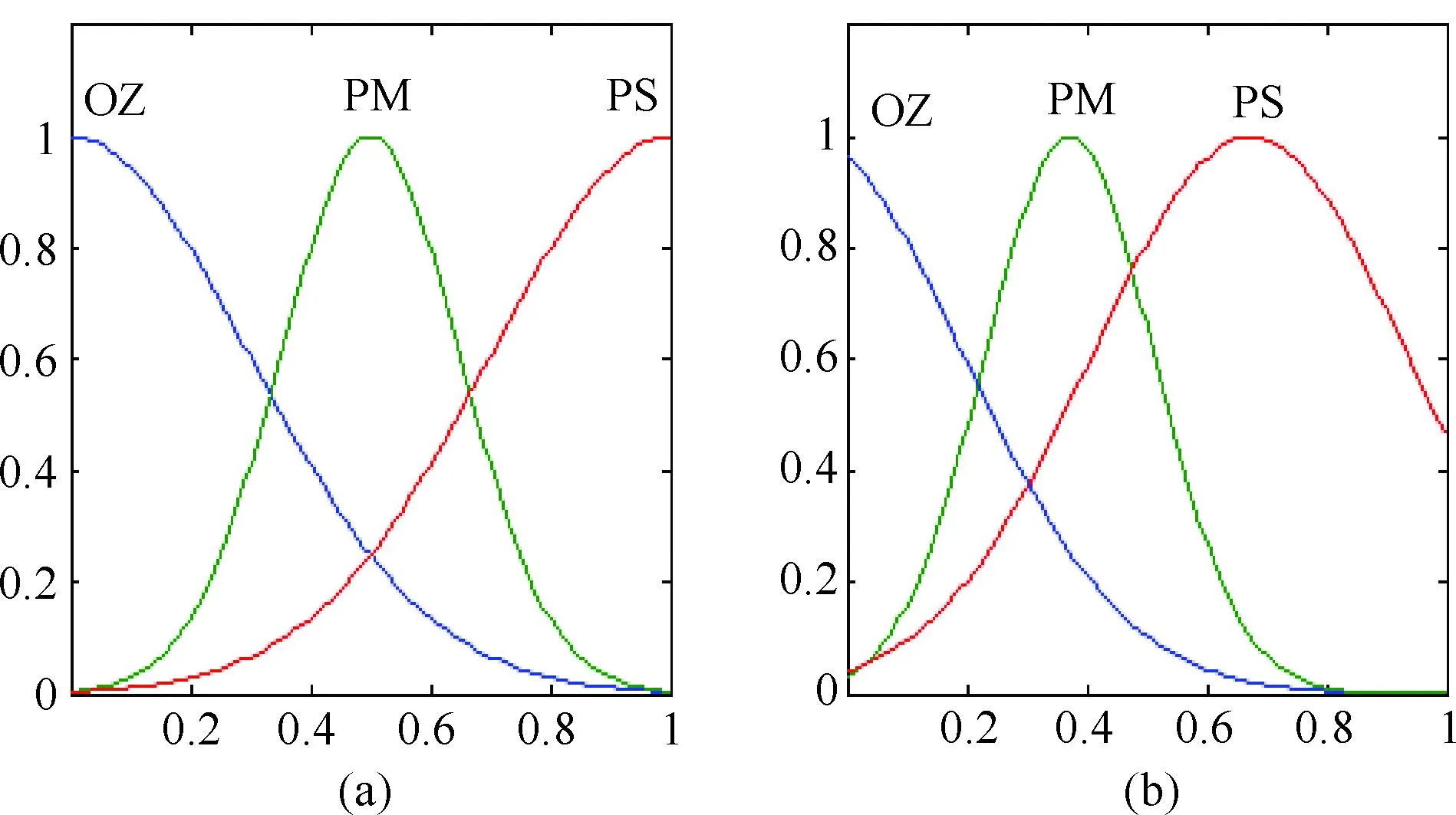
图4 出力偏差隶属函数
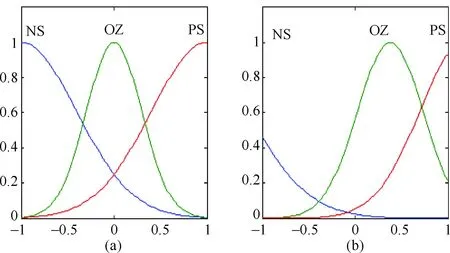
图5 频率偏差隶属函数
当水力联系机组间一台机组的负荷发生变化时,需要进行水力联系补偿,此时模糊控制器的输入信号为导叶开度和导叶变化率信号,输出为导叶控制增量信号。导叶位置比例因子由0到100%,其隶属函数由三个高斯型隶属函数构成。导叶开度变化率(dG/dt)比例因子为-2m/s到+2m/s,其隶属函数也由三个高斯型隶属函数构成。它将对导叶开度变化率检测结果划到以下三个区域:“负高(NH)”表示导叶正在迅速关闭;“正常(OZ)”表示导叶开度变化率在其设定和允许范围内;“正高(PH)”表示导叶迅速开启。由自适应模糊控制算法可以得到模糊控制器输入量调整前后的隶属函数曲线,如图6、下页图7所示。图8中的实线为水力补偿作用的控制结果。
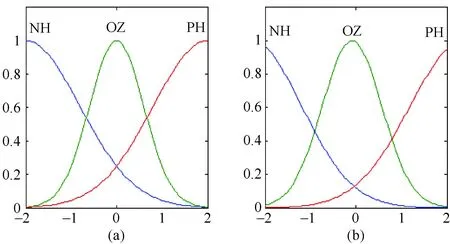
图6 导叶开度隶属函数
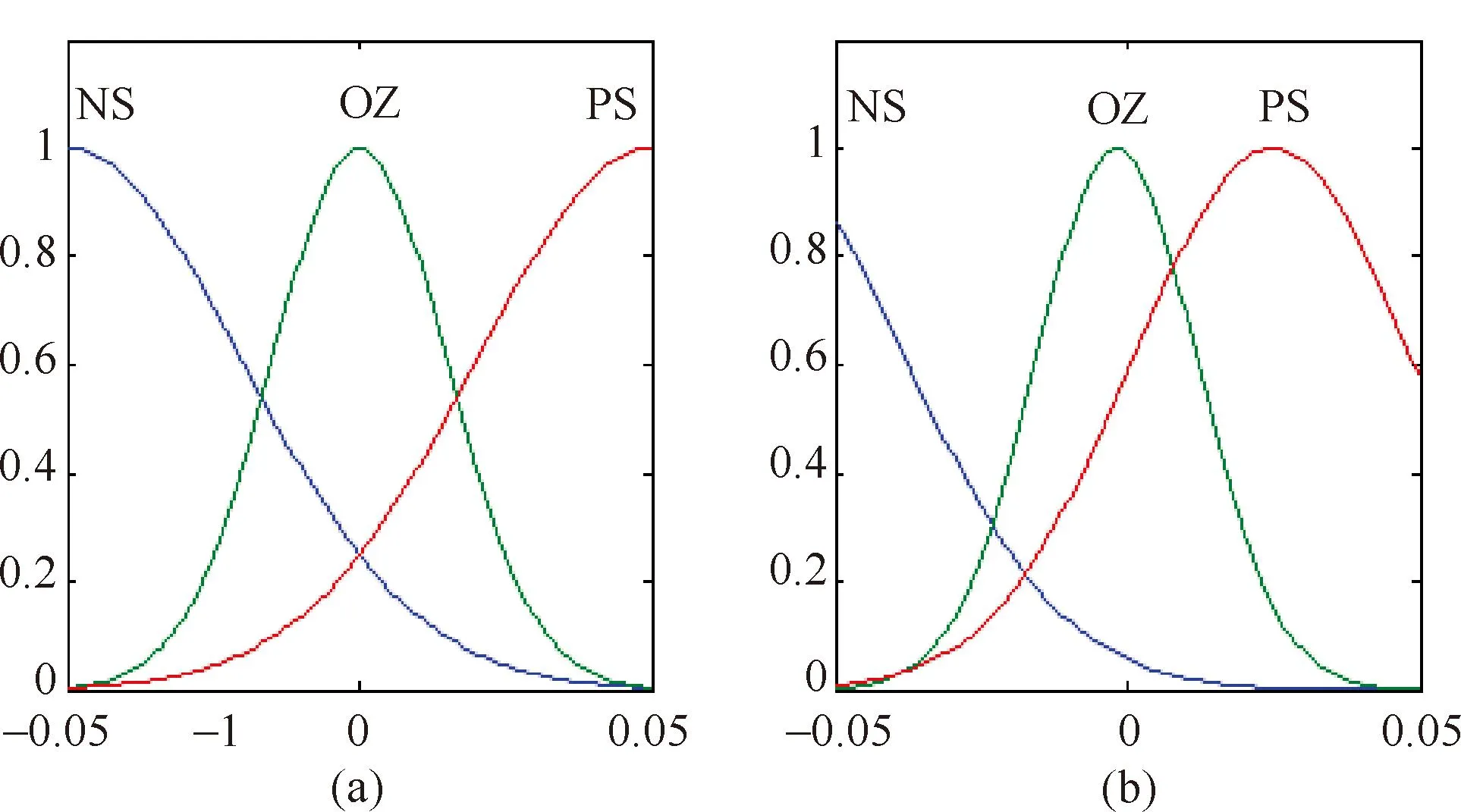
图7 导叶开度变化率隶属函数
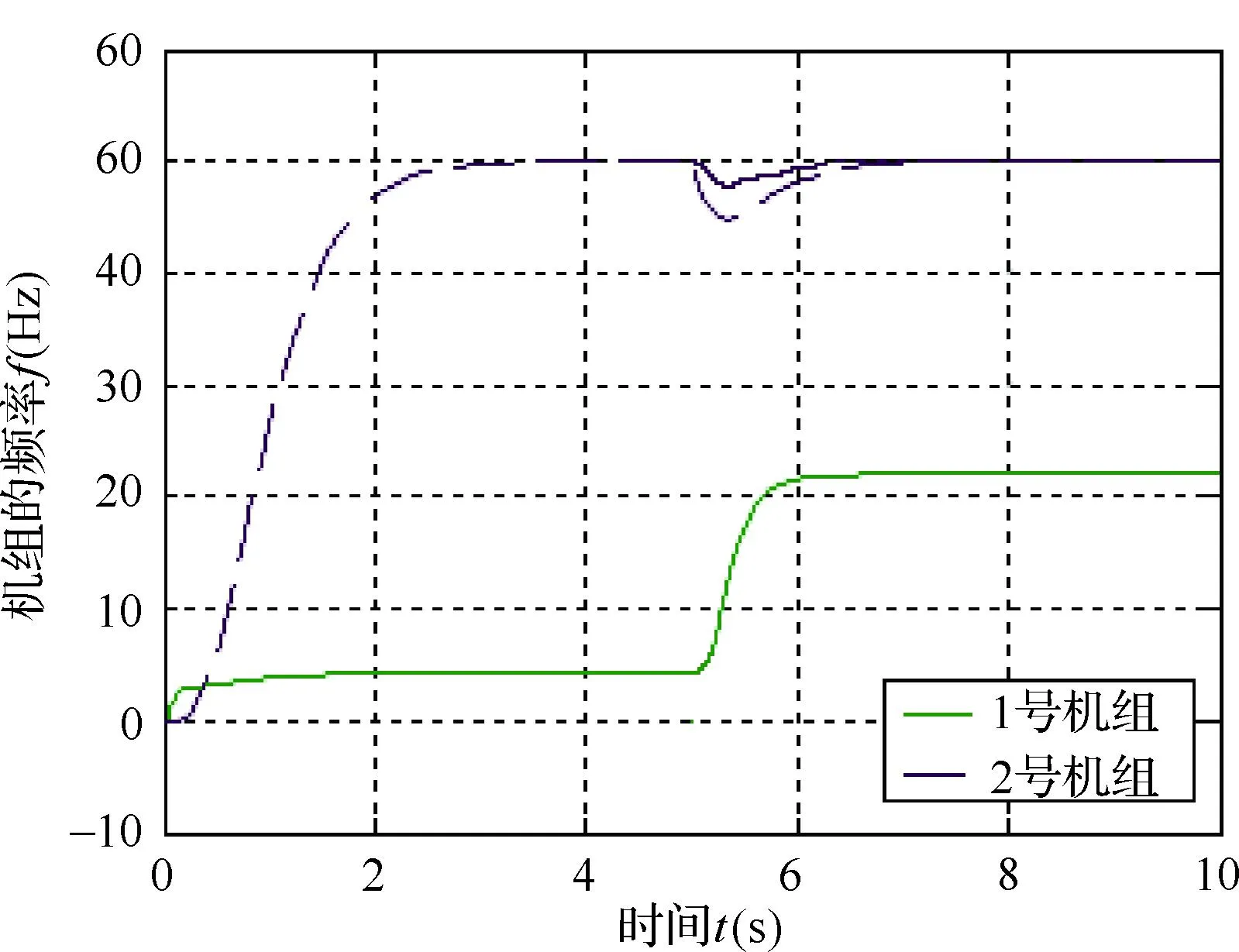
图8 自适应模糊控制器控制结果
由图8中的结果可知:0~5s间的虚线为2号机组正常运行时的控制曲线,此时模糊控制器基本上与常规PID控制器的作用相同,都是使频率达到50Hz(如图中的虚线所示)。当在5s处1号机组的导叶开度发生急剧变化时,模糊控制器由于采用了水力补偿,使具有水力联系机组的控制结果得到了很好的改善。
5结语
本文针对具有水力联系机组的特点,设计了一种自适应模糊控制器。由于采用并行算法,可在非线性条件下同时控制几台具有水力联系的机组,并且可补偿由机组之间的水力联系引起的偏差,同时通过自适应调整隶属函数,使模糊控制适用于机组的各种运行工况。设计的控制器可以取代常规控制时的两台独立的PID调速器,具有快速的响应速度和调节时间,以及良好的稳定性。
参考文献
[1]Mahmoud M, Dutton K, Denman M.Dynamical modelling and simulation of a cascaded reservoirs hydropower plant [J].Electric Power Systems Research,2004,70:129-139.
[2]Mahmoud M,Dutton K,Denman M.Design and simulation of a nonlinear fuzzy controller for a hydropower plant [J].Electric Power Systems Research,2005,73:87-99.
[3]Ogata K.Modern Control Engineering [M].ISBN0132613891,Prentice-Hall Inc.,1997.
[4]Klir G J,Yuan B.Fuzzy Sets,Fuzzy Logic,and Fuzzy Systems[M].Selected Papers by Lotfi Zadeh-ISBN9810224214,World Scientific Publishing Co.Pte.Ltd.,1996.
大华桥水电站获得国家发改委项目核准批复
日前,国家发改委下发文件,同意建设云南澜沧江大华桥水电站。
大华桥水电站位于云南省怒江州兰坪县兔峨乡境内澜沧江上游河段上,是澜沧江干流水电基地上游河段规划的八座梯级电站中的第六级。工程为堤坝式开发,以发电为主。坝址控制流域面积9.26×104平方公里,多年平均流量925立方米/秒。正常蓄水位1477米,相应库容2.93亿立方米,调节库容0.41亿立方米,具有周调节性能。总装机容量900兆瓦(225兆瓦×4),年发电量40.7亿千瓦时。
2007年11月,开始大华桥水电站可行性研究阶段设计工作;2013年12月,《云南澜沧江大华桥水电站可行性研究报告》通过审查;2014年5月,可研报告取得审查批复;2014年8月,项目申请报告通过评估;2014年12月,国家发展改革委以“发改能源[2014]2977号”文件批复核准了大华桥水电站项目。
项目核准批复后,大华桥水电站工程将全面迎来主体工程施工。
来源:中国电建 中国水力发电工程学会网2015年1月15日
http://www.hydropower.org.cn/showNewsDetail.asp?nsId=15402
科学研究及工程设计