
射波刀治疗床修正值对六维颅骨追踪总体精度的影响
2015-12-22 12:13:19沈君姝彭家华朱锡旭
医疗卫生装备 2015年6期
王 涛,沈君姝,周 含,彭家华,朱锡旭,李 兵
射波刀治疗床修正值对六维颅骨追踪总体精度的影响
王 涛,沈君姝,周 含,彭家华,朱锡旭,李 兵
目的:探讨射波刀治疗床可修正值与六维颅骨(6D Skull)靶区追踪总体精度的关系。方法:通过影像引导将治疗床移至所需修正位置进行6D Skull球方模型定位精度测试,将测试结果与修正值为0相比较及分析。结果:治疗床3个平移方向修正值为0、3、6、10 mm,靶区追踪总体精度分别为0.23、0.32、0.53、0.55 mm;治疗床3个旋转方向修正值为(0.3、0.3、1°)、(0.6、0.6、2°)、(1、1、3°),靶区追踪总体精度分别为0.12、0.99、0.78 mm;治疗床3个平移方向和3个旋转方向修正值为(3、3、3 mm,0.3、0.3、1°)、(6、6、6 mm,0.6、0.6、2°)、(10、10、10 mm,1、1、3°),靶区追踪总体精度分别为0.08、0.8、1.4 mm。结论:射波刀6D Skull靶区追踪总体精度随着治疗床3个平移方向或(和)3个旋转方向修正值的增加而增大,日常治疗摆位时应尽可能地减小治疗床的修正值。
射波刀;治疗床修正;追踪精度
0 引言
射波刀是目前世界上先进的立体定向放射外科治疗系统[1]。其治疗头部肿瘤无需用螺钉将金属定位框架固定在患者颅骨,就能达到无创舒适的治疗效果,且在治疗过程中能动态地对患者进行拍片验证及修正。射波刀六维颅骨(6DSkull)和脊柱追踪精度要求在0.95mm之内[2]。然而在日常工作摆位中发现,如果治疗床修正数据比较大,移动治疗床对其修正,再次拍片验证时,发现实际位置与预想的位置相差较大。由于射波刀等剂量线跌落陡峭,适形度高,如果最终追踪精度达不到要求,很可能会影响患者的治疗质量。因此,对射波刀治疗床修正值与靶区追踪总体精度的关系的探讨具有重要意义。
1 材料及方法
1.1 材料
Philips Brilliace Big Bore 16排螺旋CT;射波刀计划系统(Multi Plan2.1.1版本),它具有正向、逆向、适形计划功能和单中心、多中心、非等中心计划多种功能[3];Accuray公司的射波刀Ⅲ代(头颅6D跟踪软件)[4];带有球方的人骨测试体模及已剪裁的MD-22胶片;光学透明度扫描仪(Epson Expression 1680 Professional)和端对端测试软件(end-to-end Film Analysis Version 4.0)。
1.2 方法
将球方放入头颅体模中(如图1所示),对其进行CT扫描。将获得的图像传入射波刀计划系统,对其勾画及做6D Skull端对端(end to end,E2E)治疗计划,然后将计划传到射波刀SGI工作站进行数字影像重建及处方生成。从头颅模体中取出球方,对剪裁过的感光胶片进行标记。横切面胶片注明前/左,矢状面胶片注明前/上,如图2所示。将胶片按方向放入球方中,确认球方边缘无胶片突出后将其放入头颅体模中。然后摆位,对其拍摄,验证其位置,使治疗床3个平移方向修正值都为0,3个旋转方向修正值也为0。确认无误,进行治疗。治疗后取出头颅体模中的球方,将其打开并取出感光胶片,用光学透明度扫描仪对感光胶片及未曝光胶片进行扫描,将扫描图像载入E2E分析软件进行分析,得出靶区追踪总体精度[5-6],如图3所示。同样方法,调整不同治疗床修正值进行E2E测试。


图1 人体头模

图2 球方胶片标记
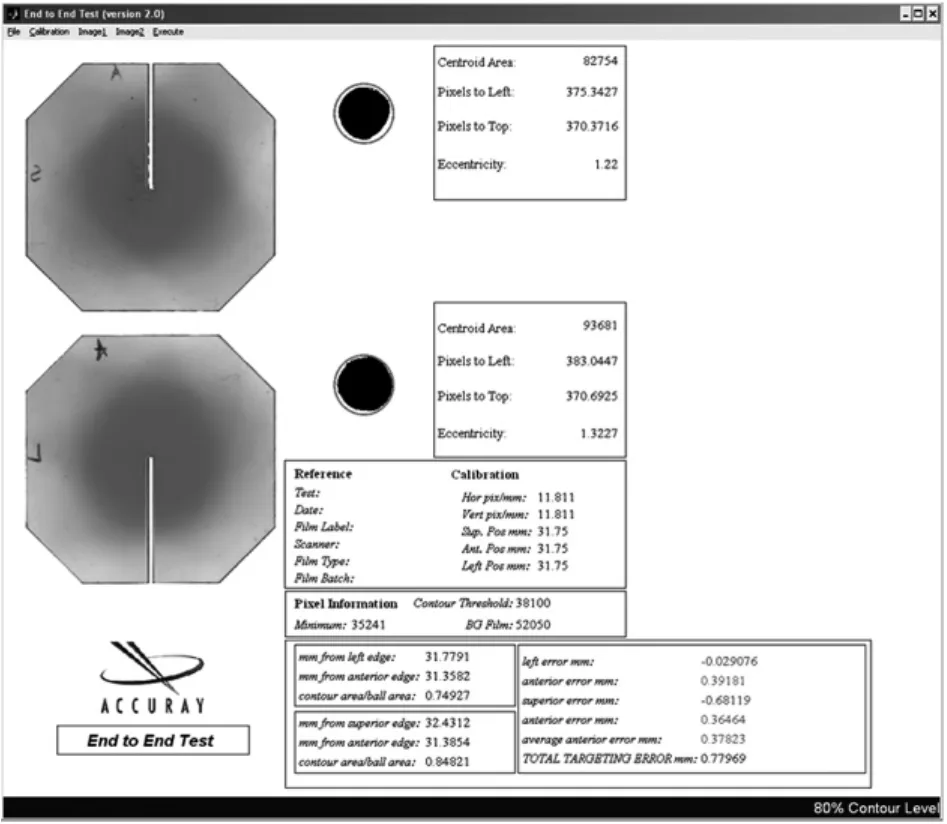
图3 E2E软件分析结果
2 结果
将实验得出的3组靶区追踪总体精度数据分别记录在表1~3中,并用Excel对数据分析模拟,靶区追踪总体精度与治疗床修正值的变化趋势如图4~6所示。
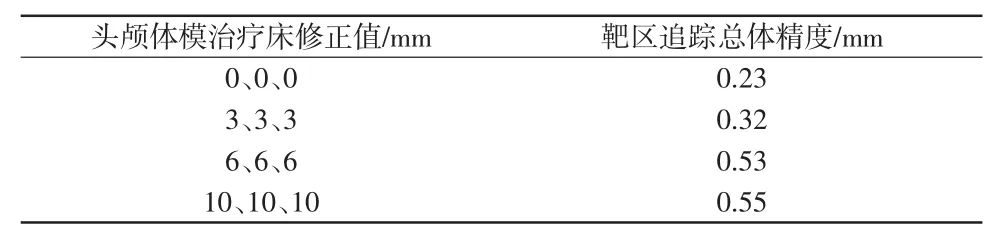
表1 平移方向修正值与靶区追踪总体精度数据
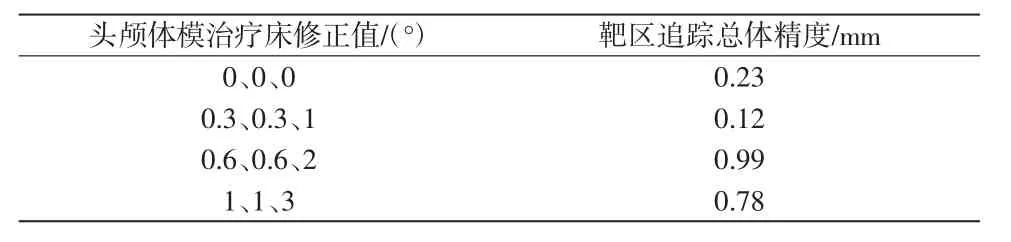
表2 旋转方向修正值与靶区追踪总体精度数据
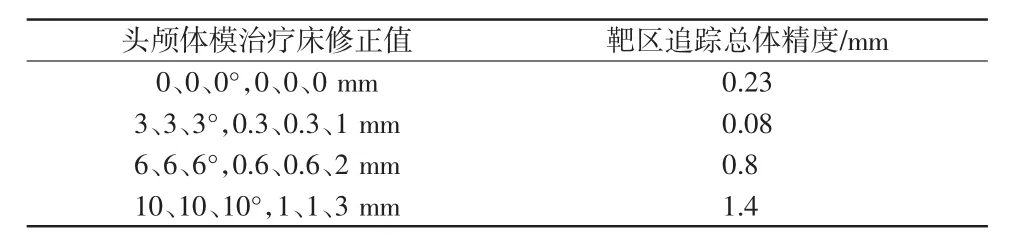
表3 平移方向和旋转方向修正值与靶区追踪总体精度数据
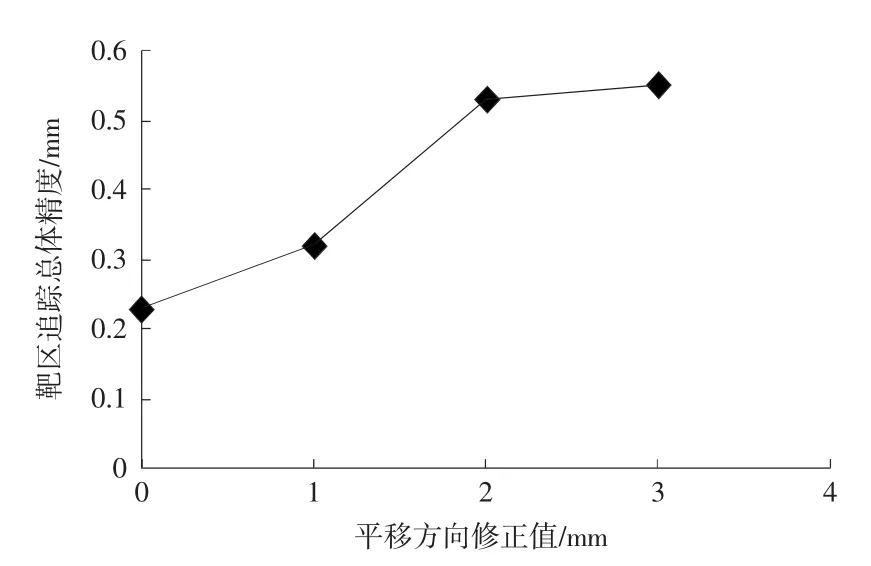
图4 靶区追踪总体精度随平移方向修正值变化趋势
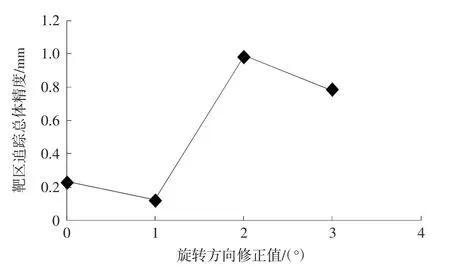
图5 靶区追踪总体精度随旋转方向修正值变化趋势
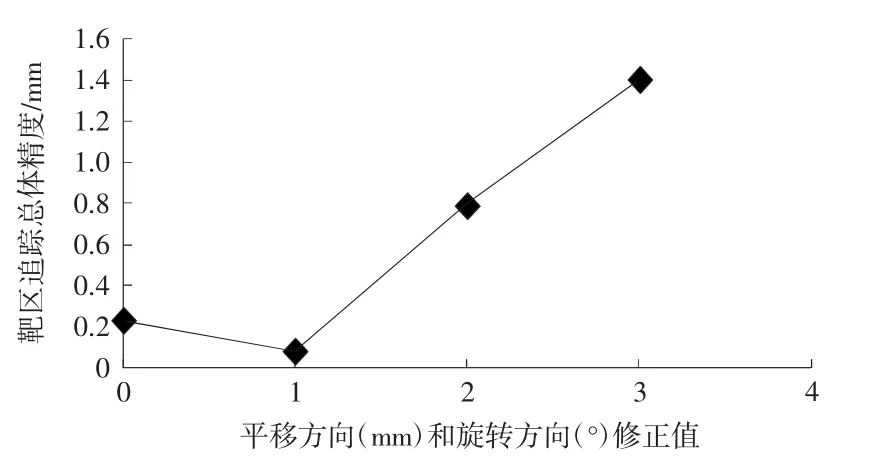
图6 靶区追踪总体精度随平移方向和旋转角度修正值变化趋势
3 讨论
从表1和图4可以看出靶区追踪总体精度随治疗床3个平移方向修正值的增加而增大。从表2和图5可以看出,靶区追踪总体精度随着治疗床3个旋转方向修正值增加先变小(幅度不大,为0.11 mm),然后增大,增大后再减小(幅度不大,为0.21 mm),但是其总体变化趋势在增大。从表3和图6可以看出,靶区追踪总体精度在初始时随治疗床平移方向和旋转方向修正值的增大先变小(0.15 mm),然后增大,但整体趋势是增大的。
射波刀端对端头颅模体靶区精度测试要求误差≤0.95 mm[7]。从表2、3可以看出当治疗床修正值较大时,靶区追踪总体精度大于0.95 mm,这就可能导致射波刀治疗时靶区一小部分脱靶,使一小部分正常组织受到不必要的照射,要求的等剂量曲线不能完全包绕靶区。然而表1~3中数据最大相差1.32 mm,而射波刀机械臂重复定位精度为0.2 mm[8-9]。所以机械臂对靶区定位误差的修正与其重复定位精度无太大关系。
上述数据是在射波刀刚做过靶区精度测试得出的,机器被调整在较好误差范围。然而随着治疗床平移方向和旋转方向修正值的增大,靶区追踪总体精度误差也随着增加。所以建议在做端对端头颅模体靶区精度测试时要使治疗床修正数据尽可能小,将机器追踪靶靶区精度控制在0.5 mm范围内。从表1~3数据得出在射波刀治疗时应将治疗床3个平移方向修正值控制在3 mm以内,左右、头脚、平旋3个旋转方向修正值分别控制在0.7、0.7、1 mm之内,这样才能保证靶区追踪总体精度[10]。治疗床修正值大小对头颅6D追踪总体精度是有影响的,那么同理脊柱追踪精度也受其影响。该实验数据对端对端靶区精度测试及日常治疗摆位具有一定指导意义。
4 结语
为了达到更好的追踪精度,要求技术人员在射波刀治疗前对患者进行摆位,使数字重建影像和实际拍摄出来的图像配准,让治疗床可修正值越小越好。而在每月做6D Skull端对端靶区精度测试时,应使治疗床可修正值控制在尽可能小的范围。六维颅骨追踪和脊柱追踪都是六维追踪,所以脊柱追踪治疗患者摆位也应像六维颅骨追踪一样[11]。
[1]石庆林,李世川,李莉,等.立体定位射波手术平台[J].医疗装备,2006,19(10):13-14.
[2]CHANG S D,Main W,Martin DP,et al.An analysis of the accuracy of theCeberKnife:aroboticframelessstereotacticradiosurgicalsystem[J]. Neurosurgery,2003,52(1):140-146.
[3]Inoue T,Lnoue T,Shiomi H,et al.Clinical experience of new stereotaetie radiotherapy system named CyberKnife[J].Nippon Rinsho,2001,59(8):1 624-1 631.
[4]李兵,封其卉,沈君姝.射波刀——全身肿瘤立体定向放射外科新设备[J].医疗卫生装备,2009,30(1):37-39.
[5]Dieterich S,Cavedon C,CHUANG C F,et al.Report of AAPM TG 135:quality assurance for robotic radiosurgery[J].Med Phys,2011,38(6):2 914-2 936.
[6]巩汉顺,鞠忠建,欧光明,等.CyberKnife系统日检结果稳定性分析[J].医疗卫生装备,2013,34(1):107-109.
[7]沈君姝,耿薇娜,王朋,等.射波刀的物理质量保证和质量控制[J].生物医学工程与临床,2012,16(2):193-196.
[8]沈君姝,李兵,戴威,等.射波刀——放射外科新设备[J].现代肿瘤医学,2010,18(11):2 289-2 291.
[9]曹洋森,于春山,刘永明.射波刀同步追踪方式对头脚及左右运动肿瘤治疗的误差分析[J].医疗卫生装备,2014,35(5):103-104,150.
[10]徐慧军,李玉,张素静,等.G4 CyberKnife两年质量保证检测结果的回顾与评价[J].中国医学物理学杂志,2013,30(3):4097-4099.
[11]Hara W,Soltys S G,Gibbs I C.CyberKnife ®RRobotic Radiosurgery system for tumor treatment[J].Expert Review of Anticancer Therapy,2007,7(11):1 507-1 515.尊敬的作者朋友:
(收稿:2014-07-06 修回:2014-11-11)
关于征集《医疗卫生装备》杂志刊发论文获得各种奖励或专利信息的函
首先感谢您多年来对我刊的关注与支持!是您的关注与支持促使我们不断改进办刊工作,使我刊越办越好,知名度越来越高,赢得了广大作者与读者的认可和赞誉。特别是近年来,我刊刊发的基金项目资助论文所占比例呈现明显的上升趋势,这极大地提高了我刊的学术水平,对提升我刊影响力起到了积极的促进作用。
为了更全面地了解2010年以来我刊刊发论文的整体质量,特向您征集相关信息。如果您在我刊刊发的论文及其所报道的科研成果在国家或军队的各级科研成果评比中获得了奖励,或获得了国家专利,请将相关获奖信息告诉编辑部,我们将在期刊和杂志网站上及时予以刊登,以便让读者了解反映当前本学科研究与技术发展水平。
为此,请您将获得科研成果奖励(专利)的证书复印件连同获奖信息一并邮寄(或通过邮件)至编辑部,我们将及时予以刊发。
期待与您一起分享您的科研成果获奖喜讯!
联系方式:邮箱:2043417970@qq.com;地址:天津市河东区万东路106号《医疗卫生装备》杂志社;邮政编码:300161,电话:022-84656750/84656790,(地)0251-56750/ 56790(军);联系人:李编辑
《医疗卫生装备》杂志社编辑部
2015年6月9日
Relationship between CyberKnife couch correction and tracking accuracy of 6D Skull
WANG Tao,SHEN Jun-shu,ZHOU Han,PENG Jia-hua,ZHU Xi-xu,LI Bing
(Department of Radiation Oncology,Nanjing General Hospital of Nanjing Military Area Command,Nanjing 210002,China)
ObjectiveTo investigate the relation between Cyberknife couch correction and target tracking total accuracy of 6D Skull.MethodsThe couch was shifted to the desired position with image guidance,and positioning accuracy of the ball-cubes model was tested based on 6D Skull.The errors were compared with the result of the condition when the couch correction value was zero.ResultsWhen couch correction values in three translation directions were 0,3,6 and 10 mm,target tracking total accuracies were 0.23,0.32,0.53 and 0.55 mm respectively;when couch correction values in three rotation directions were(0.3,0.3,1°),(0.6,0.6,2°),(1,1,3°),target tracking total accuracies were 0.12,0.99 and 0.78 mm respectively;when couch correction values in three translation and rotation directions were(3,3,3 mm and 0.3, 0.3,1°),(6,6,6 mm and 0.6,0.6,2°),(10,10,10 mm and 1,1,3°),target tracking total accuracies were 0.08,0.8 and 1.4 mm respectively.ConclusionThe tracking accuracy of CyberKnife 6D Skull is increasing along with the increase of couch correction in three translation and rotation directions,so that the couch correction has to be reduced in daily setup as soon as possible.[Chinese Medical Equipment Journal,2015,36(6):92-94]
CyberKnife;couch correction;tracking accuracy
R318.6;TH777
A
1003-8868(2015)06-0092-03
10.7687/J.ISSN1003-8868.2015.06.092
王 涛(1988—),男,放疗技师,主要从事肿瘤放射治疗方面的研究工作,E-mail:jsnjwt@163. com。
210002南京,南京军区南京总医院放疗科(王 涛,沈君姝,周 含,彭家华,朱锡旭,李 兵)
李 兵,E-mail:lib99@163.com
猜你喜欢
销售与市场(营销版)(2022年11期)2022-11-18 05:33:42
疯狂英语·新阅版(2021年6期)2021-07-19 22:16:54
国际放射医学核医学杂志(2021年10期)2021-02-28 08:41:58
癌症进展(2020年20期)2020-12-24 17:06:02
中国临床医学影像杂志(2019年4期)2019-06-18 10:55:04
摄影之友(2019年8期)2019-03-31 03:06:19
丝路艺术(2018年8期)2018-09-27 09:24:38
大众健康(2017年6期)2017-06-14 20:04:23
中国医学装备(2015年10期)2015-12-29 12:00:26
第二课堂(课外活动版)(2015年3期)2015-10-21 19:41:19
