
可用语音控制的多功能医用护理床的设计
2015-12-22 12:13胡小林马红梅
医疗卫生装备 2015年6期
胡小林,马红梅
可用语音控制的多功能医用护理床的设计
胡小林,马红梅
目的:设计一种可以通过语音控制的医用护理床,以满足失能老年人与残障人士的护理需求。方法:通过电动推杆驱动定块机构实现护理床床头和侧面的升降,采用ATmega128单片机控制升降机构。整个过程通过对3组麦克风信号的识别实现语音控制。结果:当用户有操作要求时,发出语音指令,单片机识别出指令后,可发出相应的控制指令,驱动机构驱动电动推杆运动完成动作。结论:该医用护理床可以有效地提高卧床者的生活质量,减轻陪护人员或护理人员的工作量。
医用护理床;语音控制;语音识别
0 引言
据中国社科院发布的数据显示,我国失能老人的数量已经超过3 700万人,预计到2015年将接近4 000万人[1]。根据第六次全国人口普查我国总人口数及第二次全国残疾人抽样调查我国残疾人占全国总人口的比例推算,2010年末我国残疾人总人数为8 502万人[2]。数量巨大的老年人与残障人士需要护理的客观需求,人民生活水平的提高以及减轻家人、护理人员劳动强度的渴望,加上传统使用的护理床无法满足要求,因此,需要更高技术含量的智能护理床来满足功能障碍群体对生活自理、自立的迫切渴求[3]。现有技术中一些电动护理床[4]已经能实现通过手控器自主调节人在床上的体位,能控制床的起卧、左右侧翻等;但是对于一些肢体残疾无法使用手控器者、病情危重者、重度瘫痪者等,则需要通过其他方法如语音来控制护理床。基于此类需要,笔者设计了一种可以使用语音来控制的多功能医用护理床,并于2013年1月开始应用于医院和养老院,取得了较好的效果。
1 机械结构设计
1.1 整体结构
床体包括可上下、左右翻转的活动床板,电动推杆固定在床板下方,控制器分别与电动机、语音识别器连接。用于采集语音信号的麦克风固定在床头,均与控制器连接。其床头翻起和床板侧面翻起时状态示意图如图1、2所示。

图1 床头翻起示意图

图2 床板侧面翻起示意图
1.2 升降机构
床头和侧板的上下翻转通过电动推杆驱动定块机构实现升降,其结构如图3所示。

图3 升降机构结构示意图
在电动推杆的驱动下,推动杆左右运动,驱动升降机构上升或下降。在该定块机构的驱动下,活动板床可以在0~45°范围内任意翻转。由于电动推杆本身带自锁功能,活动板床的翻转不需要额外的自锁装置。考虑到床头和侧面同时翻转的情况,在床头的3块翻板各设置一个单独的升降机构,其电动推杆分别为床头电动推杆(左)、床头电动推杆(中)、床头电动推杆(右)。其余翻板左右两侧各设置一个升降机构,分别为左侧电动推杆、右侧电动推杆。
2 控制系统设计
2.1 控制系统总体结构
控制系统总体结构框图如图4所示。

图4 控制系统总体框图
为了更好地捕获用户发出的语音指令,分别在床头以及左右两侧各设置了一个麦克风。由于麦克风采集到的声音信号往往混杂有各类噪声,可通过滤波电路滤去噪声,保留20 Hz~20 kHz的信号。ATmega128单片机自带A/D转换功能,因此不需要额外的A/D转换电路。多路开关用于将多个麦克风采集到的信号通过分时复用的方法逐个送入单片机进行A/D转换,多路开关选用芯片MAX4638。上位机可以通过串口对单片机进行设置,在上位机控制下将用户的各种语音命令采集并存储于单片机的电可擦可编程只读存储器(electrically erasable programmable read-only memory,EEPROM)内,以供执行命令时进行比对。本设计采用带减速的直流低压滚珠丝杆式电动推杆,采用L298N芯片进行驱动。操作按键采用9键矩阵式键盘,用于手动调整床头、侧板的升降高度,可进行手动模式、语音模式、个人计算机(personal computer,PC)控制模式3种模式的切换,控制上采用延时的办法去抖动,采用线路反转的方法识键。
2.2 实现语音控制系统的关键技术
2.2.1 语音提取技术
语音识别系统包括预处理、特征提取、模型的训练和匹配、后处理等几个部分[5]。虽然每路麦克风输出信号均有相应滤波电路去除噪音干扰,但滤波电路只能去除人的声音频段范围以外的噪声干扰,对于人的声音频段以内的信号,例如另外一个人说话的声音等信号则无法有效去除,因此需要对用户发出的声音信号进行提取。
在提取声音信号时首先应将声音信号的起始点获取到。常用的声音信号起始点的获取方法有双门限法[6]和信息墑法[7],由于医院病房相对来说比较安静,环境噪声较小,这里采用双门限法确定声音信号的起始点和结束点。
设有一段声音指令信号x(t),经过A/D转换后变成数字量后得到数字集合:
采用双门限法获取了其声音信号的起始点Xi和结束点Xj,则可以得到指令信息段为


对X*(k)进行离散时间傅里叶变换(discretetime Fourier transform,DTFT)则可得到该段语音信号的频谱。例如,有一段发音“eee”,其信号及对应频谱如图5所示。

图5 发音“eee”的信号及频谱
从图5可以看出,“eee”的发音频率主要集中在200和400 Hz左右,如果要识别某段发音与该发音的相似度,只需要识别出其频谱的相似度即可。如果在发音中混叠了其他声音信号,其频谱图会发生相应改变,但只要混叠的声音信号不是长时间的、大幅度的,则混叠后得到的频谱图应包含未混叠前的声音信号频谱图。同一个人对于同一个内容在不同时间发出的声音信号其基准频率可能不一样,在频谱图上反映出来的就是频谱图发生平移但形状不变。不同大小的声音,在频谱图上的反映就是幅值按比例放大或缩小。
因此,在医用护理床进行语音识别前,可以预先将用户发出的各项语音指令进行DTFT计算后得到的频谱图Tn(n=1,2,…,k,k代表指令条数)存储到单片机的EEPROM。为了防止基准的变化导致的频谱平移现象,只存储频谱形状,而不存储频谱频率。在用户使用医用护理床时,发出语音信号S后,单片机对信号S进行DTFT计算后得到频谱图TS。然后对Tn进行查找,查找时根据频谱的幅值最大值先对TS进行缩放,使得最大幅值一样,若在查找过程中发现某一频谱Ti完全包含于缩放后的TS,或90%以上包含于缩放后的TS,则可以认定语音命令S即为Ti所对应的命令。
2.2.2 多路声音信号混叠技术
为了更好地捕获用户发出的声音指令,在床的两侧及床头均设置了麦克风。由于用户距离3个麦克风的距离不相等,3个麦克风获取的指令信号强度就不一样,这样在分别对3路声音信号进行DTFT运算之后就需要对这3路信号进行叠加或选择。理想情况下,如果没有噪声干扰,3个麦克风获取的3组声音信号的频谱图形状应该一样,只是幅值上有区别。但是,由于噪声的存在,不同的麦克风获得的声音信号的频谱图会有微小的差异,为了更好地获取有用信号,就需要得到3组声音信号频谱图上的相同部分,去掉相异部分。
3组麦克风对于同一个用户指令获得的频谱图经过幅值缩放后所得到的频谱图如图6所示。很明显,A、B区域的频谱是由用户指令形成的,为3组麦克风信号所共有;而C、D区域的频谱是由不同麦克风周围的噪声形成的,由于各麦克风周围噪声不一样,所以3组信号各不相同。因此,要去掉噪声,保留有用信息,需要对3组频谱图进行处理,保留相同部分,去掉相异部分。将图6(a)和图6(b)作一次模二减法即可得到2幅图相异的地方,减法结果记为A′,再用图6(a)减去A′,结果中正值保留,负值记为0,得到的新图就为(a)、(b)2幅图相同的地方,记为AB。再将图AB与图6(c)按同样的方法处理即可得到3幅图相同的地方,也就是3组麦克风获取的有用信息。
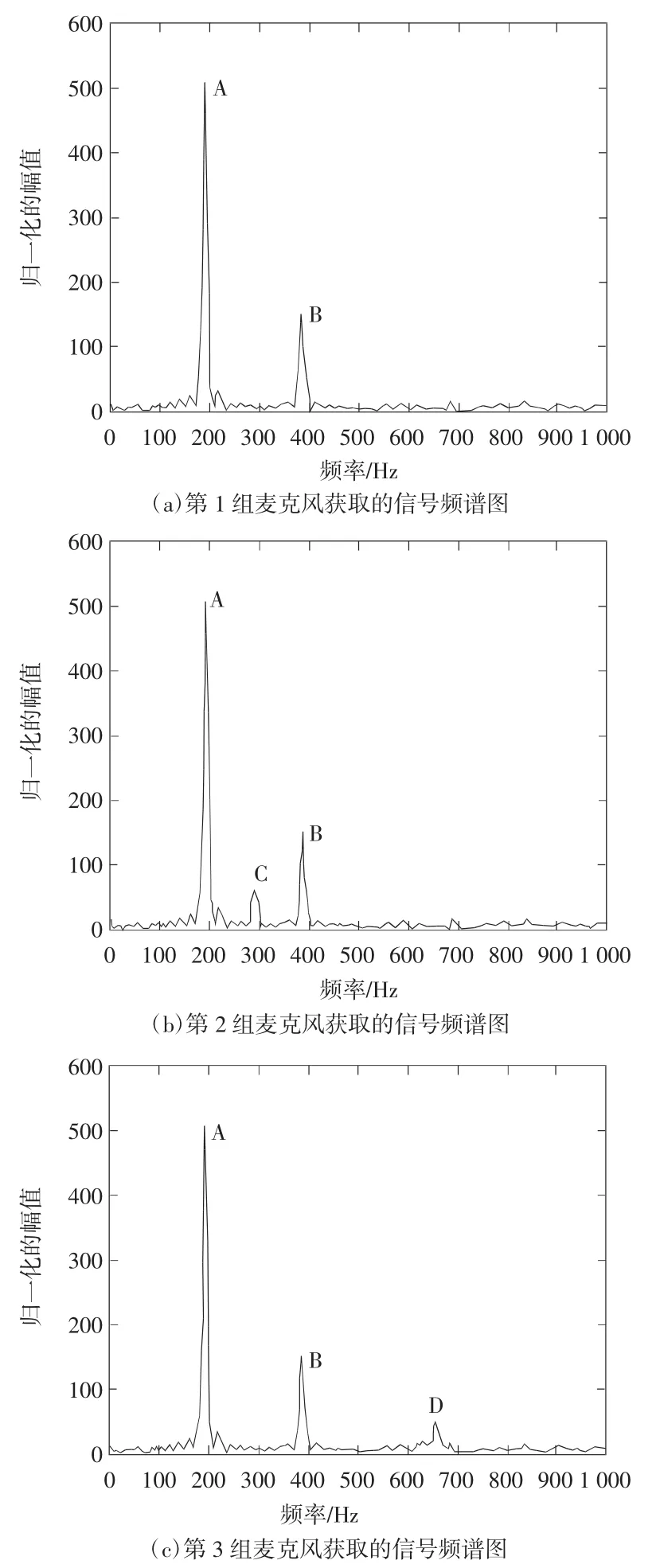
图6 同一用户指令的3组麦克风信号频谱图
2.3 控制系统的软件实现
整个控制系统均由ATmega128单片机实现控制,并采用C语言进行编程。控制程序由主程序及各子程序组成。程序框图如图7所示。
控制程序主要包括主程序、语音子程序、手动控制子程序、与PC联机子程序、按键中断服务子程序。主程序用于初始化各变量、寄存器,并根据当前系统模式调用相应子程序,其程序流程如图7(a)所示。语音程序主要完成语音指令的识别以及执行,其程序流程如图7(b)所示。手动操作子程序主要完成用户在手动模式下直接按下操作按键来实现床头和侧板的翻转,手动操作模式下首先检测被用户按下的按键的键值,然后根据键值开启对应的电动推杆,其程序流程图如图7(c)所示。与PC联机子程序的主要功能是通过RS232串口将PC传递的值存储至单片机的EEPROM。按键中断服务子程序的主要功能是用户按下模式选择键时以中断方式更改系统操作模式。

图7 控制程序框图
3 应用
初次使用该护理床需进行语音设定。由患者先发出各指令的标准发音,PC采集分析完成后通过联机模式将数据传送至单片机。设定完成后,卧床的患者发出声音,即可经由控制器驱动电动机使护理床作出相应指令动作,方便地完成体位的变更。该护理床已于2013年1月开始应用于医院临床护理工作,目前从医院及患者的反应来看,效果良好,语音识别的准确率达到95%以上,能够满足日常护理需要。
4 结论
可用语音控制的多功能医用护理床能够准确、便捷地按照用户的语音指令控制护理床的前部升降、腿部屈伸、左右侧翻,满足卧床者翻身、上身坐起、腿部屈曲伸直等体位的需要。患者卧床时能根据自己的意愿采取舒适的体位,提高了生活质量,并能预防压疮的发生。
医用护理床床体可靠、稳定、安全,能方便地安装辅助装置,如书饭桌、输液杆等,大大地减轻了陪护人员或护理人员的劳动强度,将陪护人员或护理人员从繁重的协助翻身工作中解放出来。如果能进一步和医院的呼叫系统对接,则能取得更好的效果。
[1]毛海峰,周蕊,周强,等.失能老人:沉重的衰老,何处可依?[EB/OL].(2014-06-25)[2014-12-18].http://www.banyuetan.org/chcontent/jrt/ 2014623/104721.html.
[2]中国残疾人联合会.2010年末全国残疾人总数及各类、不同残疾等级人数[EB/OL].(2012-06-26)[2014-12-18].http://www.cdpf.org. cn/sytj/content_30399867.htm.
[3]廖翼.智能护理床的发展现状与趋势[J].医疗装备,2013(10):12-15.
[4]辛绍杰,张欢欢,马西沛.多功能电动护理床的研制[J].上海电机学院学报,2013,16(6):322-329.
[5]李宏梅,伍晓芹.有关语音识别技术的研究[J].现代电子技术,2010(8):139-140.
[6]杨大利,徐明星,吴文虎.语音识别特征参数选择方法研究[J].计算机研究与发展,2003,40(7):963-969.
[7]甄斌,吴玺宏,刘志敏,等.语音识别和说话人识别中各倒谱分量的相对重要性[J].北京大学学报:自然科学版,2001,37(3):371-378.
(收稿:2014-12-12 修回:2015-03-10)
Design of multifunctional and speech-controlled nursing bed
HU Xiao-lin,MA Hong-mei
(Renmin Hospital of Wuhan University,Wuhan 430060,China)
ObjectiveTo design a multifunctional and speech-controlled nursing bed for the elderly and disabled. Method The bed had itself ascended or descended through the fixed slider mechanism driven by electromotive pushrod, with ATmega128 SCM controlling the elevating unit.The speech control of the elevating process was realized by recognition of voice signals from three micro phones.ResultsThe SCM recognized the speech command given by the patient, and then sent control command to drive the pushrod to ascend or descend the bed.ConclusionThe bed can increase the living quality of the patient and decrease the workload of nursing staffs.[Chinese Medical Equipment Journal,2015,36(6):25-28]
medical nursing bed;voice control;voice recognition
R318.6;TH772.1
A
1003-8868(2015)06-0025-04
10.7687/J.ISSN1003-8868.2015.06.025
胡小林(1976—),女,主管护师,主要从事内科护理方面的研究工作,E-mail:huxiaolin_hs@163.com。
430060武汉,武汉大学人民医院(胡小林,马红梅)
马红梅,E-mail:616902747@qq.com
猜你喜欢
电子测试(2022年3期)2023-01-14
宝钢技术(2022年4期)2022-12-23
现代仪器与医疗(2022年3期)2022-08-12
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
中老年保健(2021年4期)2021-12-01
数学大王·中高年级(2020年4期)2020-04-19
中国核电(2017年1期)2017-05-17
小学科学(2016年12期)2017-01-06
电脑爱好者(2016年24期)2017-01-05
