
地铁列车清洁制动控制方案探讨
2015-12-21 03:33胡亚军
现代城市轨道交通 2015年5期
胡亚军
地铁列车清洁制动控制方案探讨
胡亚军
为了有效解决列车紧急制动距离超标的问题,提出清洁制动的概念,即为了清洁制动摩擦副而施加的纯空气制动。详细介绍清洁制动的基本控制策略,分析了清洁制动的开始阶段、过程控制阶段、结束阶段等具体控制方案,并对清洁制动的维护设置进行了阐述。
地铁列车;清洁制动;空气制动;电制动
目前,地铁列车常用制动包含电制动和空气制动(又称摩擦制动),两者协调配合。电制动由牵引电传动系统控制,空气制动由空气制动系统控制。通常情况下,常用制动优先使用电制动,以便充分利用电制动功能。当电制动力不足时,空气制动按总制动力需求补充不足的制动力。近年来,随着牵引电传动技术的高速发展,电制动能力越来越强大,在很多项目中,电制动能力几乎能够完全满足整列车的制动力要求,列车在整个运行速度区间内几乎不需要补充空气制动。这使得空气制动系统的制动闸瓦与车轮踏面、闸片与制动盘长期很少摩擦,影响到闸瓦或闸片表面的状态,使得闸瓦或闸片的摩擦力下降,严重影响空气制动的性能。因此,列车需要经常实施空气制动,使得闸瓦与车轮踏面、闸片与制动盘产生一定程度的摩擦,以达到清洁摩擦副的效果,我们将这种为了清洁制动摩擦副而施加的空气制动称为清洁制动。
1 实施清洁制动的背景和目的
与常用制动不同,紧急制动作为关乎列车行车安全的最后一道屏障,为纯空气制动,当列车发生意外脱钩、主风缸欠压等严重故障影响行车安全时,空气制动系统自动施加紧急制动。
然而,在多个城市的地铁运营过程中,曾经一度出现紧急制动距离超标这一现象。紧急制动距离指列车在某种速度时从紧急制动指令发出至停车这个过程的列车行驶距离,通常对紧急制动距离有严格的距离考核要求,如果紧急制动距离超标,则会对行车安全造成严重安全隐患。那么,引起紧急制动距离超标的原因是什么呢?通过调查分析后发现其中一个重要原因是,由于电制动能力较强,常用制动极少需要空气制动参与,这使得空气制动系统的制动闸瓦或闸片长期很少与车轮踏面或制动盘摩擦,影响到闸瓦或闸片表面的状态,由于表面材料摩擦系数发生变化而产生特殊的硬化层物质,最终使得闸瓦或闸片的摩擦力下降,当施加紧急制动时,导致紧急制动距离延长,超出正常误差范围。
为了改善制动闸瓦或闸片的表面状态,使其处于正常工作状态,列车需要定期或不定期实施空气制动,使得闸瓦与车轮踏面、闸片与制动盘产生一定程度的摩擦,以达到清洁摩擦副的效果,并且应该在列车速度较高时进行摩擦,这是因为低速时摩擦效果不明显。
通过实施清洁制动,制动闸瓦与车轮踏面、制动闸片与制动盘能够得到清洁,使其处于正常工作状态,从而为紧急制动提供了基础保障,保证紧急制动距离在正常误差范围之内,最终有效避免和解决了紧急制动距离超标这一问题。
2 清洁制动控制方案
2.1 基本控制策略
列车施加常用制动时,电制动力优先施加,如果电制动力无法满足总的制动力需求,那么不足的制动力由空气制动补充,这一控制方式被称为电空混合制动。然而,由于目前很多项目中的电制动能力足以满足列车在定员(AW2)工况(甚至AW2以上工况)时的总制动力需求,仅仅在低速区间(通常当列车速度小于7 km/h时)才实施电空混合制动,空气制动才有机会施加。此外,即便在低速时列车施加空气制动,低速时闸瓦与车轮踏面、闸片与制动盘之间摩擦所产生的能量仍然不足以对摩擦副起到预期的清洁效果,因此,为了达到清洁摩擦副的目的,则需要列车在区间高速运行时施加不由电制动参与的纯空气制动,在某个特定的时间段内将电制动临时禁止,一旦完成这种清洁制动之后,再立即将电制动恢复正常。
通过上述分析,我们认为清洁制动控制方案中需要解决的几个关键问题是:①清洁制动开始控制策略,即解决电制动在什么时候禁止、电制动由谁禁止的问题;②清洁制动过程控制策略,即解决在清洁制动持续过程中,空气制动及电制动各自处于何种状态的问题;③清洁制动结束控制策略,即解决电制动在什么时候恢复、电制动由谁控制恢复的问题。
为此,首先需要表示出列车在2个站台之间运行的全过程,一般来讲,列车从上一站开始运行至下一站结束这个完整过程如图1所示(假定线路为平直轨道),其中包括:列车启动(t0)、加速(t0~t2)、惰行(t2~t3)、减速(t3~t7,其中t4~t5为中间调速阶段)、停车(t7)等阶段。
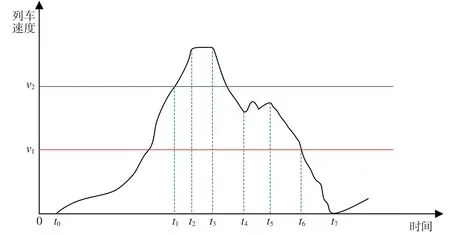
图1 站-站之间列车运行过程示意图
其次,考虑清洁制动具体该如何控制实现的问题。究其本质,清洁制动即为不由电制动参与的纯空气制动,因此,方案的核心问题是如何控制牵引系统使其在某段特定的时间内禁止施加电制动,鉴于此,提出由列车控制与管理系统(TCMS)、空气制动系统、牵引系统共同配合实现清洁制动的具体方案,该方案的控制流程图如图2所示。

图2 清洁制动控制流程图
由图2可以看出,TCMS在方案中起了十分重要的作用,TCMS作为列车的神经中枢,可以通过列车通信网络向牵引系统、空气制动系统等列车各子系统发送网络数据,并且具有传输速率快、可靠性高的特点。本方案中,由TCMS负责判断列车清洁制动开始和结束的条件,如果条件满足,TCMS则向空气制动系统发送开始或结束清洁制动的请求,空气制动系统收到TCMS发送的请求信号后,向牵引系统发送禁止或恢复电制动指令,以控制纯空气的清洁制动的施加。
下面,结合图1和图2,对清洁制动控制方案中的主要阶段进行详细探讨分析。
2.2 清洁制动开始
清洁制动开始的基本前提条件包括:时间条件以及列车速度条件,只有当TCMS判断这2个条件均已满足,TCMS才会发出清洁制动开始请求,再由空气制动系统向牵引系统发出禁止电制动指令,开始执行清洁制动。
(1)清洁制动开始的时间条件。为了达到清洁摩擦副的效果,空气制动系统供应商通常建议每天执行2次清洁制动。为了不影响列车的正常运营,我们认为在每天列车运营的早高峰之后实施清洁制动较为妥当。因此,一般选取每天上午10∶00以后作为清洁制动开始的时间条件,TCMS判断当前的时刻位于10∶00之后时,即认为清洁制动开始的时间条件满足。
(2)清洁制动开始的速度条件。由于低速时制动闸瓦与车轮踏面、闸片与制动盘之间摩擦所产生的能量不足以对摩擦副起到预期的清洁效果,因而清洁制动必须满足一定的速度条件,即当前列车速度达到某个速度值(临界值)以上时,TCMS即认为清洁制动开始的速度条件满足。通常选取的此临界值在60 km/h以上。
清洁制动开始控制方案中,T C M S判断当前时刻是否处于上午10∶00之后,假设图1中t0点表示10∶00这一时刻,于是所有t0点之后的时间点均满足清洁制动开始的时间条件。当列车运行至t1点时,速度达到清洁制动起始速度临界值v2,因此,当列车运行至点(t1,v2)时,TCMS对当天已实施的清洁制动次数n加以判断,如果n≥2,则本次清洁制动控制过程结束,当天不再进行清洁制动;如果n<2,由于列车速度达到了清洁制动起始速度临界值v2,则TCMS向空气制动系统发出开始清洁制动的请求。
空气制动系统收到TCMS发送的开始清洁制动请求信号之后,接下来当列车发出制动指令时(图1中从t3点开始列车发出制动指令),空气制动系统向牵引系统发送禁止电制动指令,从而电制动被禁止,列车只施加纯空气制动,即清洁制动开始实施。
2.3 清洁制动过程控制
在清洁制动开始实施后、TCMS发出结束清洁制动指令之前的这个过程中,空气制动发出的禁止电制动指令始终保持有效,电制动始终被禁止,列车仅施加纯空气的清洁制动,图1中t3~t6这个阶段即为清洁制动实际施加过程,在此阶段,列车不一定一直处于制动状态,其中t4~t5表示列车在区间内正常调速,速度会上下小幅波动,从t5开始,列车又恢复至制动减速阶段。在清洁制动实施过程t3~t6,电制动始终处于禁止状态。
2.4 清洁制动结束
当列车施加清洁制动直至列车速度降低到v1以下时,TCMS向空气制动系统发出结束清洁制动的请求。清洁制动结束这一控制方案如图3所示。

图3 清洁制动结束控制示意图
当速度降低至v1之前(即速度大于v1时),列车处于清洁制动施加过程,电制动为禁止状态,因而电制动力为0,空气制动力为最大值;当速度降低至v1及以下时,TCMS向空气制动系统发出结束清洁制动请求,清洁制动过程即将结束,因此,v1称作清洁制动末速度临界值,通常v1数值在30~40 km/h之间选取。如图3所示,在v1点空气制动系统接收到TCMS发出的结束清洁制动请求后,经过一定的延时(该延时称作空气制动退出响应时间,具体时间长度由当前制动级位大小、制动缸压力、制动指令传输延时等因素决定)之后,速度值降低至v',此时空气制动将电制动禁止指令复位,即不再发出电制动禁止指令,电空转换正式开始:电制动力开始逐渐上升,空气制动力开始逐渐下降,其中上升曲线和下降曲线变化的斜率相等(斜率值通常与列车冲击极限相等),以实现电制动和空气制动的平滑过渡和转换。当速度降低至v'' 时,电制动力完全恢复,空气制动力完全退出,本次清洁制动过程结束。
实施1次完整的清洁制动需要经历清洁制动开始、过程控制、清洁制动结束阶段。TCMS记录当天清洁制动已实施次数(初始值为0),当每次清洁制动结束之后,TCMS将已实施次数n+1保存并判断是否小于2,如果当天清洁制动已实施次数小于2,则当天可以再次实施清洁制动;反之,当天不再实施清洁制动。
3 清洁制动维护设置
为了便于在列车实际运营时对清洁制动这一功能进行维护,我们在TCMS维护软件中增加了对清洁制动的维护功能,软件界面如图4所示,列车维护人员不但可以重新设置清洁制动的启用时间(默认时间为上午10∶00,重设的时间在TCMS设备掉电后丢失,再次上电后恢复为默认时间),并且可以设置清洁制动的使能状态,即激活或禁用,只有当使能状态设置为激活状态时,才允许列车使用清洁制动功能,如果设置为禁用状态,则禁止列车使用清洁制动功能。
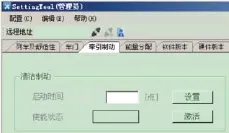
图4 维护软件中清洁制动设置界面
此外,列车维护人员能够通过司机室显示屏(DDU)查看当前列车清洁制动的使能状态。图5示意DDU制动系统维护界面,最后一行表示清洁制动使能状态,绿点表示激活状态,红点表示禁用状态。

图5 DDU制动系统维护界面
4 结语
列车实施清洁制动能够使制动摩擦副处于正常工作状态,从而为紧急制动提供了基础保障,有效解决了制动距离超标这一问题。本文所述列车清洁制动实施控制方案中,清洁制动控制包括清洁制动开始、过程控制、清洁制动结束阶段,该方案由TCMS、空气制动系统、牵引系统共同配合完成,其中TCMS发挥了清洁制动开始和结束条件判断、发送清洁制动开始和结束请求指令等关键控制作用,而空气制动系统与牵引系统则充当了TCMS指令执行者。此外,列车维护人员能够通过TCMS维护软件对清洁制动功能进行启用时间设置、使能状态设置等维护操作,并通过司机显示屏查看其使能状态。
[1] GB 50157-2013 地铁设计规范[S].
[2] 王冬雷. 地铁车辆电空混合制动平滑过渡问题分析及改进建议[J]. 电力机车与城轨车辆,2010,33 (3).
[3] 马喜成. 上海轨道交通4号线地铁车辆紧急制动功能分析与计算[J].电力机车与城轨车辆,2007,30 (3).
[4] 钱华,余接任,谭寿云. 基于网络数据传输模式的列车制动电空混合控制的改进[J]. 机车电传动,2014 (3).
责任编辑 冒一平
Discussion on Control Scheme of Metro Train Clean Brakes
Hu Yajun
In order to effectively solve the problem of train emergency brake distance exceeding, the paper puts forward the concept of clean brake i.e. pure air brake applied to clean the brake friction pair. The basic control strategy of clean brake is introduced in detail, and the control schemes for starting stage, process control stage and end stage, are analyzed. It also introduces the clean brake maintenance setting up.
metro train, clean brake, air brake, electric brake
U260.35
2015-02-04
胡亚军:南车南京浦镇车辆有限公司动车设计部,工程师,江苏南京 210031
猜你喜欢
铁道机车车辆(2022年1期)2022-03-24
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
机电信息(2021年25期)2021-10-15
中学生数理化·中考版(2019年10期)2019-11-25
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
科技与创新(2017年13期)2017-07-19
中学生数理化·中考版(2017年10期)2017-04-23
科技传播(2015年20期)2015-03-25
信息安全研究(2015年3期)2015-02-28
西安航空学院学报(2014年5期)2014-07-13
