
非接触测量电机转速传感器综述
2015-12-20 07:36毛敏
电子测试 2015年23期
毛 敏
(陕西国防工业职业技术学院,陕西西安,710300)
非接触测量电机转速传感器综述
毛 敏
(陕西国防工业职业技术学院,陕西西安,710300)
阐述了最新转速测量传感器的工作原理、工作过程及设计方法,通过比较各种测速传感器的特点, 说明了测速传感器的发展方向。
测速传感器;单片机;转速测量
0 引言
在工业生产中,需要对一些产品的速度进行在线测量,例如钢板在生产线上需要测量其转速,或者是时刻监控金属板的转速,预防生产过程的误差。
传统的测量方法是使用接触式测量,随着科学技术的发展和产业升级的需求,各种产品的类别越来越复杂,接触式测量很难对新的产品进行测量。尤其在生产企业中要严格控制成本,传统的测量方法误差大,很难控制成本。
本文综述了国内外比较典型的非接触测量电机转速的传感器,并阐述各传感器的基本原理、设计方法和技术特点。
1 电机测速传感器
1.1 磁电式测速传感器
采用磁电感应原理实现测速,测量对象转动时,转速传感器的线圈会产生磁力线,齿轮转动会切割磁力线,磁路由于磁阻变化,在感应线圈内产生电动势,磁电式传感器测量转速示意图如图1所示:

图1 磁电式传感器测量转速
磁电式转速传感器的感应电势产生的电压大小,和被测对象转速有关,被测物体的转速越快输出的电压也就越大,输出电压和转速成正比。但是在被测物体的转速超过磁电式转速传感器的测量范围时,磁路损耗会过大,使得输出电势锐减。
当测量对象转动时,触发轮与传感器之间的间隙周期性变化,磁通量也会以同样的周期变化,从而在线圈中感应出近似正弦波的电压信号,传感器的输出峰值电压与转速关系为:

式中, V 为传感器输出峰值电压,V;n 为发动机转速,r/ s;d 为传感器与触发轮间的间隙,mm;K 为与传感器有关的参数。
1.2 霍尔测速传感器
金属或半导体薄片置于磁感应强度为B的磁场中,磁场方向垂直于薄片,当有电流I通过薄片时,在垂直于电流和磁场的方向上将产生电动势,,为霍尔元件的灵敏度,维持、不变,则。
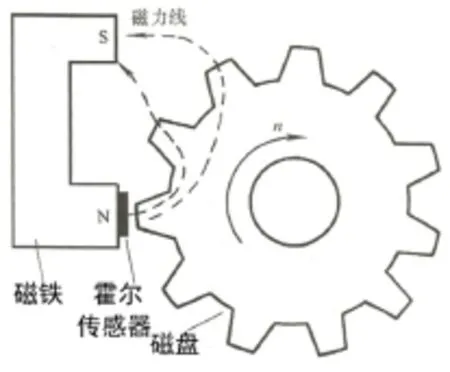
图2 霍尔传感器测量转速
图2 为霍尔传感器测量转速示意图。在被测转速的转轴上安装一个齿盘,也可选取机械系统中的一个齿轮,将线性型霍尔器件及磁路系统靠近齿盘。齿盘的转动使磁路的磁阻随气隙的改变而周期性地变化,当齿对准霍尔元件时,磁力线集中穿过霍尔元件,可产生较大的霍尔电动势,放大、整形后输出低电平;反之,当齿轮的空挡对准霍尔元件时,磁力线从上下侧通过,输出为高电平。
霍尔器件输出的微小脉冲信号经隔直、放大、整形,将脉冲信号送入单片机,单片机完成对电机转速脉冲计数的控制,读取寄存器完成转速频率的确定。电机脉冲信号连接到中断引脚,中断对转速脉冲计数,每到1s读一次外部中断计数值,此值即为脉冲信号的频率。根据下式可计算出电机的转速,电机转速计算公式:

其中n为电机转速,f为电机脉冲信号频率,z为转轴旋转一圈霍尔传感器产生的脉冲数。
1.3 电涡流测速传感器
系统中前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。当被测金属体靠近这一磁场,则在此金属表面产生感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率μ、电导率δ、金属体的形状、表面因素r(粗糙度、沟痕、裂纹等)、电涡流线圈的激励源频率ƒ、激励电流i1以及头部线圈到金属导体表面的距离x等参数有关。
通常假定金属导体材质均匀且是线性的,则线圈和金属导体系统的物理性质可由金属导体的电导率δ、磁导率μ、表面因素r、头部体线圈与金属导体表面的距离x、电流强度i1和频率ƒ参数来描述。则线圈特征阻抗可用Z=R+jωL=F(i1,ƒ,μ,δ,r,x)函数来表示。如果控制i1,ƒ,μ,δ,r这几个参数在一定范围内不变,则线圈的特征阻抗Z就成为距离x的单值函数,虽然它整个函数是一非线性的,但可以选取它近似为线性的一段。通过前置器电子线路的处理,将线圈阻抗Z的变化,即头部体线圈与金属导体的距离x的变化转化成电压或电流的变化,输出信号的大小随探头到被测体表面之间的间距而变化,根据这一原理实现对金属物体的位移的测量。
在被测物体旁边安装一个电涡流传感器,当转轴转动时,传感器周期地改变着与旋转体表面之间的距离,它的输出电压也周期性地发生改变,此脉冲电压信号经放大、变换后,可用单片机完成对电机转速脉冲的计数,读取寄存器完成转速频率的确定,从而测出转轴的转速。若转轴上开z 个槽(或齿),频率f(单位为Hz),则转轴的转速n(单位为r/min)的计算公式同(2-2)。
电涡流传感器转速测量示意图如图3所示:
图3 电涡流传感器转速测量
1.4 光电传感器测速
电路原理图如图4所示:

图4 光电传感器测速电路
光源发出的光线经聚焦透镜2会聚成平行光束,照射到被测旋转物3上,光线经事先粘贴在旋转物体上的反光纸4反射回来,经透镜6聚焦后落在光敏二极管7上。旋转物体每转一圈,光敏二极管就产生一个脉冲信号,经放大整形电路得到TTL电平的脉冲信号,单片机完成对电机转速脉冲的计数,读取寄存器完成转速频率的确定,最后由电机转速计算公式(2-2)得到转速。
1.5 线阵CCD传感器测速
CCD将光敏二极管阵列集成为一体,把入射到传感器光敏面上按空间分布的光强信息,转换为按时序串行输出的电信号。
在被测轴表而贴上明暗相间的条纹,其中阴影部分为镀有反光材料的细螺旋纹,反射率较高;而周边区域为黑色,基本不反光。光束照射到转轴表面,反射后成像在CCD感光区,形成一条明亮细窄的条纹,而周边相对较暗,线阵CCD传感器测速原理如图6所示:

图5 线阵CCD传感器转速测量
随着转轴的转动,CCD感光区上的亮纹会水平连续移动,移动范围为L,CCD可精确记录亮纹移动位移变化,只要得到已知时间间隔内亮纹位置的变化,即可获得条纹水平轴向移动的速度,进而转化为待测轴的转速,
设转轴垂直于光轴,成像系统的放大系数为β,转轴的瞬时转速为ω(rad/s),转轴旋转一圈,暗条纹移动距离为L(m),移动速度为V(m/s),对应像瞬时移动速度为V'(m/s 通过CCD及同步控制电路迅速检测出条纹微小移动位移及产生此微小位移所需的时间间隔,可得到条纹像的移动速度V'),转速公式为:

2 性能比较及其发展方向发展
1)磁电式测速传感器利用电磁感应原理,体积小、灵敏度低,其输出灵敏度随间隙而变化,输入输出是非线性关系。永磁体对被测铁磁物的吸力较大,影响被测系统原始状态。
2)电涡流式测速传感器是利用在被测物上设置等距标记,如凸齿来测量转速,结构简单,体积小,可靠性好。
3)光电式测速传感器利用挡光盘或反光黑白条纹,以输出脉冲,选用精确时钟,测速精度高,制作某种特殊标记线,还可从脉冲形状上判断移动或转动方向,或提供转轴位置的信号。结构简单,体积小,测转速范围宽。
随着现今精密制造业的崛起和节省成本的需求,非接触测速传感器会慢慢取代现在市场上的接触式测速传感器,通过计算机技术与测量技术相结合,对被测物进行自动化、智能化的测量控制,这也是测量技术的一种发展趋势。
3 结论
本文对当前转速测量传感器作了系统的阐述,并对其工作原理、工作过程和设计方法作了论述。本文所介绍的转速测量传感器采用新型的信息获取和处理技术,与传统的测速传感器相比,具有非接触、灵敏度高、分辨率高、响应速度快、抗干扰力强等优点,在工业中应用广泛。
[1] 孙圣和. 现代传感器发展方向[C].第一届仪器仪表与测控技术学术大会,2007,成都.
[2] 梁森,王侃夫.自动检测与转换技术[M]. 北京: 机械工业出版社,2011.
[3] 徐鼎新.开关型霍尔效应集成传感器的原理与应用[ J].计量与测试技术,2003(4).
[4] 王元庆. 新型传感器原理及应用[M].北京: 机械工业出版社,2002.
[5] 张福学. 传感器应用及其电路精选[M]. 北京: 电子工业出版社,2000.
[6] 阮智利,黄杭美. 自动检测与转换技术[M]. 北京: 机械工业出版社,1990.
Discussing of non - contact measuring motor speed sensors
Mao Min
(Shaanxi Institute of Technology,Xi'an,710300,china)
This paper describes the working principle, working process and design method of the latest speed measurement sensors,and compares the characteristics of various speed sensors,and explains the development direction of the speed sensor.
Speed sensor;microcontroller;Speed Measurement
毛敏(1976—),女,陕西省西安市,陕西国防工业职业技术学院,硕士研究生。研究方向:电子信息
猜你喜欢
大电机技术(2022年4期)2022-08-30
上海大中型电机(2021年1期)2021-06-09
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
山东冶金(2019年2期)2019-05-11
童话王国·文学大师班(2017年6期)2017-07-10
微特电机(2017年10期)2017-05-15
电脑爱好者(2016年23期)2017-01-05
太空探索(2015年6期)2015-07-12
汽车维护与修理(2015年6期)2015-02-28
