
基于智能钻井的三维井眼轨道设计及修正方法研究
2015-12-19 03:49刘珊珊毕雪亮
西部探矿工程 2015年6期
闫 铁,刘珊珊,毕雪亮
(东北石油大学油气钻井技术国家工程实验室,黑龙江大庆163318)
基于智能钻井的三维井眼轨道设计及修正方法研究
闫 铁*,刘珊珊,毕雪亮
(东北石油大学油气钻井技术国家工程实验室,黑龙江大庆163318)
完全智能钻井系统是未来定向钻井技术的发展方向,其井下系统可以智能识别储层情况,在地面预测出现较大误差时,能够自动设计相应的井眼轨道完成精确中靶的施工目标。在能够获取实际地质信息的前提下,对于条形储层预测走向与实际走向误差较大的情况,设计了三维智能井眼轨道。在钻井过程中,设计了轨道修正闭环控制系统,有效控制井眼轨迹与设计轨道的符合率。提出的三维井眼轨道模型能够充分反映出智能钻井的技术特点和需求,并具有通用性,可广泛应用于斜直井、定向井、水平井的轨道设计、监测及修正设计,这种新的数学模型和设计方法为智能钻井技术的推广和应用奠定了基础。
智能钻井;三维轨道设计;三维轨道修正
1 完全智能钻井系统
1.1 基本组成
完全智能钻井系统由地面监控系统、井下数据处理与轨道设计系统、井下测量与测控系统、双向通讯系统、偏置执行机构5部分组成[1]。相比于旋转导向钻井系统,完全智能钻井系统应该具有高速、高效的双向通讯系统,能探测储层及钻具信息的随钻井下测量系统,能对测量数据进行处理并作出决策的井下数据处理与轨道设计系统,能够将井下信息实时可视化反映到监控屏和可干预井下智能钻井系统的地面监控系统,能钻出平滑井眼、精确改变钻具造斜能力的偏置执行机构。地面监控系统不断将井深参数传入井下数据处理与轨道设计系统;井下数据处理与轨道设计系统,处理井下测量系统传来的数据并结合井深参数,在预测出现较大误差时,智能设计井眼轨道;在钻井过程中,井下测量与测控系统中的工具测控系统不断将实钻轨道与设计轨道进行对比,通过偏置执行机构纠正偏差。
1.2 完全智能钻井系统特点
20世纪80年代中期以后,国际石油钻井中使用随钻测量、随钻测井、随钻地震、随钻地层评价、钻井动态信息实时采集处理、地质导向和井下旋转导向闭环钻井等先进技术以来,钻井技术发生了质的变化,其变化特征为[2-6]:
(1)钻井信息数字化。在钻井过程中,井下地质参数、钻井参数、流体参数和导向工具位置及状态的实时测试、传输、分析、执行、反馈及修正,钻井信息向完全数字化方向发展。越来越脱离人们的经验影响和控制,钻井过程逐步成为可用数字描述的确定性过程。
(2)工具和作业智能化、集成化。当前的导向钻具、测试工具和作业控制都日趋智能化。一项由国际数家公司组成,1990年开始,历时5年,耗资950万美元开发的集成钻井系统(IDS)和集成钻井作业系统(IDO)获得成功,是钻井系统及操作智能化的体现。而近年地面自动控制的导向钻井工具和随钻地层评价测试系统(FEMWD)开发成功,更体现了工具和作业智能化趋势。完全智能钻井系统特点为:(1)可以知道钻头所在位置,智能识别储层实际情况;(2)可以连续完成钻井任务,而旋转钻井系统需要人为干预;(3)当地面预测存在较大误差时,可以智能设计相应轨道保证中靶;(4)对于一些特殊储层,可以智能设计相应靶区轨道实现高效开发。
2 三维智能着陆井眼轨道设计
适用于长条形油气藏,例如单一河道砂体形成的油气藏,其长条延伸方向与设计方位线存在较大误差时,为了有效开发储层必须扭方位进行修正。
2.1 安全圆柱与靶区设计
为防止实际井眼轨迹与设计井眼轨道偏差过大而导致脱靶,设计安全圆柱与靶区,一旦井眼轨迹穿出这一范围就重新设计井眼轨道,如图1所示:
图1 三维井眼轨道安全圆柱与靶区
安全圆柱是以设计着陆井眼轨道O′Pbt1为轴线,r为半径的圆柱体。靶区的设计遵循行业技术规范,以L为靶区长度,h为靶区高度,w为靶区宽度。
从图中可以看出,先进行了扭方位再增斜入靶,这是因为变方位率与井斜角有关,井斜角越大扭方位越困难。图中O为水平投影图中变方位井段的曲率中心,RH为水平投影图中变方位井段所对应的曲率半径,P为当前钻头所在位置,Pb为扭方位段,bt1为修正方位后的着陆井段,t1为入靶点,t2为设计终止点;在水平投影图上,扭方位部分为圆弧段,扭完方位后着陆部分为直线段。
2.2 入靶井斜角的计算
通常地层是倾斜的,可以用地层倾角来表示其倾斜程度,用下倾方位来表示其倾斜方向。对于单一河道砂体的条形储层,其砂体内部连通状况较好而与围岩的连通性一般较差,因而油气主要储集在这一长条形砂体内。当它的产状与预测存在较大误差时,为了有效开发储层,水平井段应始终保持在储层中。因此,需要重新设计靶区轨道方向并按该方向进行入靶井斜角的计算,其计算原理[7]如下:
若重新设计的靶区方位为Φ+ΔΦ即长条的延伸方向,入靶点处储层的下倾方位为Ψ,储层的地层倾角为β,如图2所示。
入靶井斜角αt=90°-arctanC,其中C=tanβcos(Φ+ ΔФ-Ψ)。
图2 储层产状参数图
2.3 计算水平投影图上变方位井眼曲率半径
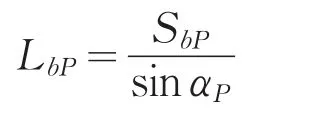
水平投影图如图3所示。
图3 三维智能着陆轨道水平投影图
图3中,O′(NO′,EO′,DO′)为井口,P为当前井底,b为扭方位终点,O为扭方位段水平投射的曲率中心,t为入靶点。已知P点处空间坐标(NP,EP,DP),井斜角αP,方位角ΦP,当前水平位移O'P;t点处空间坐标(Nt,Et,Dt),井斜角αt,方位角Φt(即Φ+ΔФ),设RH为曲率半径。
令直线bt的方程为:N=EcotΦt+c,代入t点(Nt,Et),有:
Nt=EtcotΦt+c
c=Nt-EtcotΦt
直线bt的方程为:
N=EcotΦt+Nt-EtcotΦt
横向靶前距:

计算水平投影图上的曲率半径:
2.4 计算井眼轨道参数
ΔDbP=LbPcosαP
ΔDtb=ΔDtP-ΔDbP
当Φt>ΦP时,O点水平坐标:NO=NP-RHsinΦPEO=EP+RHcosΦP
当Φt<ΦP时,O点水平坐标:NO=NP+RHsinΦPEO=EP-RHcosΦPb点水平坐标:
Nb=NO+RHcosΦO'MEb=EO+RHsinΦO'M
扭方位后,以bM作为稳斜调整段,at为圆弧段,计算圆弧段曲率半径来判断是否需要更换钻具,如图4所示。
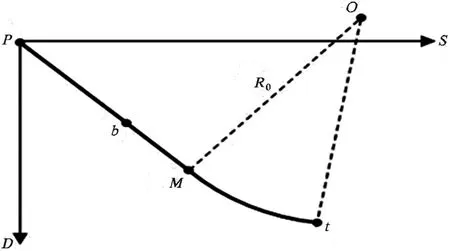
图4 扭方位-稳-增入靶垂直剖面图
几何关系满足下式:
若Rmin<R0,先以bM作为稳斜调整段,再通过MN段造斜到αQ,续以NQ稳斜段,一旦发现油气显示立即增斜到αt,从靶点t进入储层中部,如图5所示。
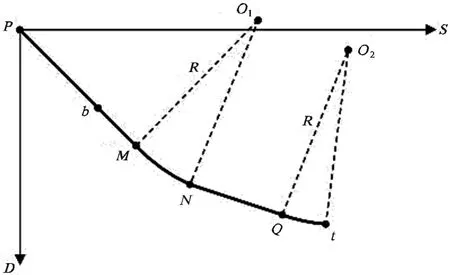
图5 三维井眼着陆轨道垂直剖面图
欲准确进入储层中部,需满足以下关系式:
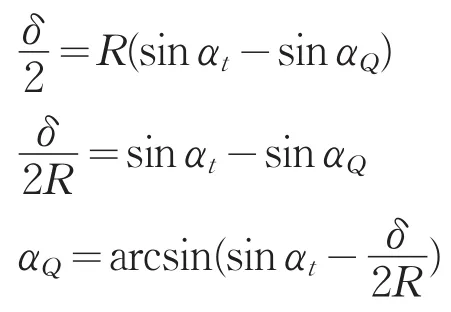
式中:δ——入靶点处储层厚度,m;
α——各点井斜角,(°);
R——造斜率对应的曲率半径,m。
bM段:

整理,得:
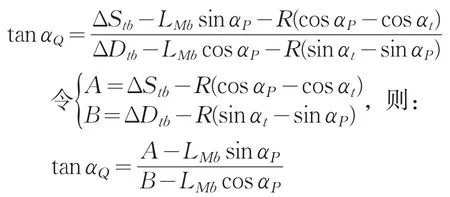
分离LMb,得:
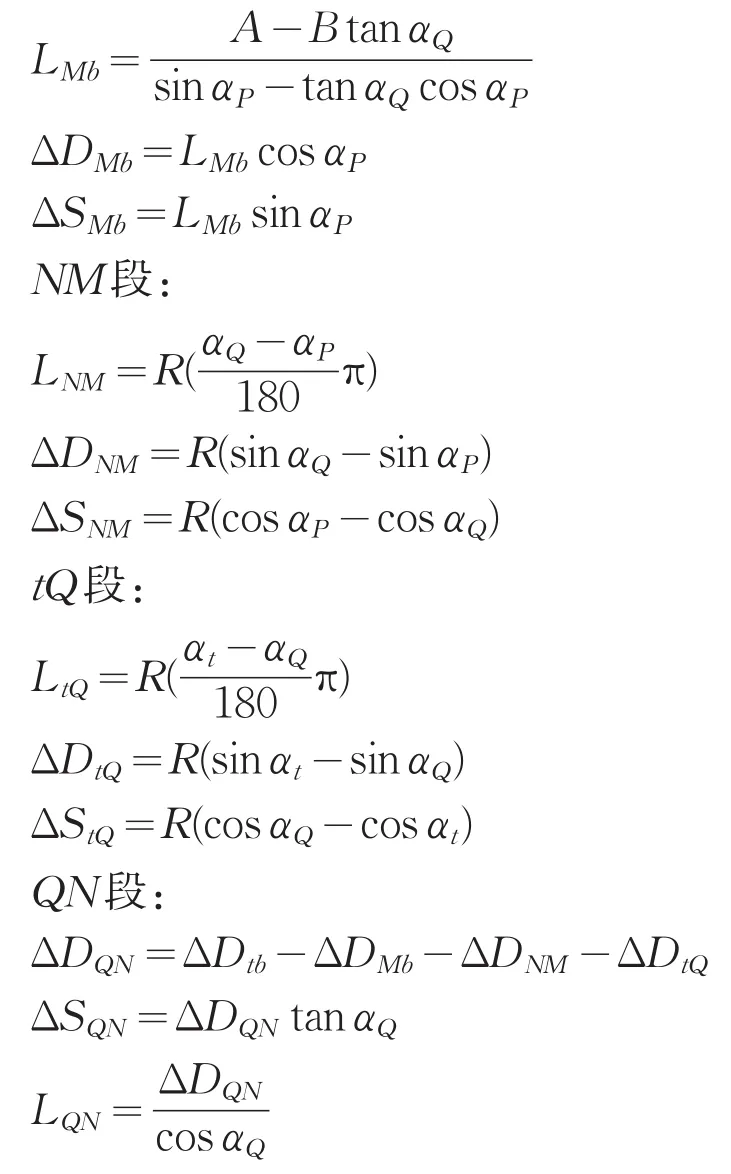
空间坐标变化:
ΔNMb=ΔSMbcosΦtΔEMb=ΔSMbsinΦtΔNNM=ΔSNMcosΦtΔENM=ΔSNMsinΦtΔNQN=ΔSQNcosΦtΔEQN=ΔSQNsinΦtΔNtQ=ΔStQcosΦtΔEtQ=ΔStQsinΦt
设计结果见表1。
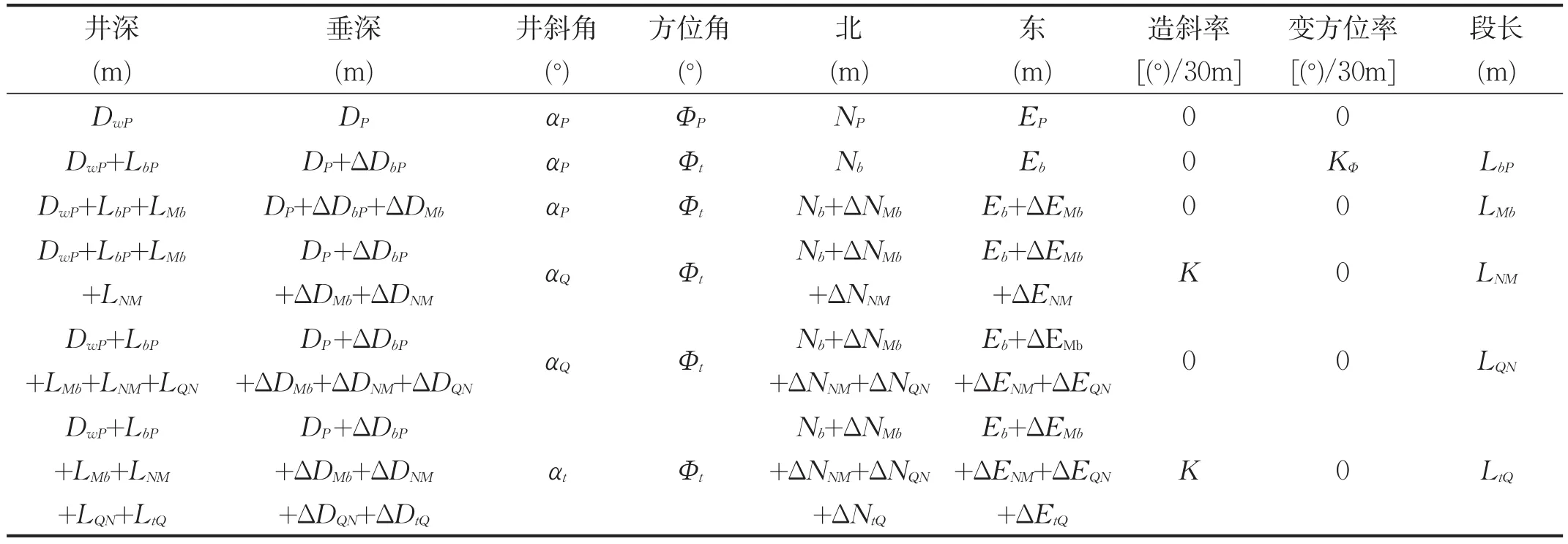
表1 三维井眼着陆轨道设计结果
2.5 轨道姿态的自动调整
已知最近两测点井深L1、L2井斜角α1、α2,方位Φ1、Φ2,则可计算当前钻具的变井斜能力和变方位能力:Kα、KΦ。
ΔL=L2-L1
将Kα、KΦ与该井段设定值Kαx、KΦx比较,作差得到ΔKα、ΔKΦ,由控制器计算所需侧向力的大小和方向并下令给偏置执行机构;偏置执行机构改变钻具受力情况后,再次测量Kα、KΦ与该井段设定值Kαx、KΦx比较,不断修正至满足精度要求。其闭环控制系统如图6所示,在图6中,设定值与反馈值经过比较器比较产生偏差,控制器对偏差进行调节计算,产生控制信号驱动执行机构,从而合被控参数,如井斜变化率、方位变化率等达到期望值。将上述连续控制系统中的比较器和控制器功能用微型计算机实现,就能组成一个微型计算机控制系统。执行器即为偏置执行机构,被控对象为钻头,被控参数为井斜变化率和方位变化率等。
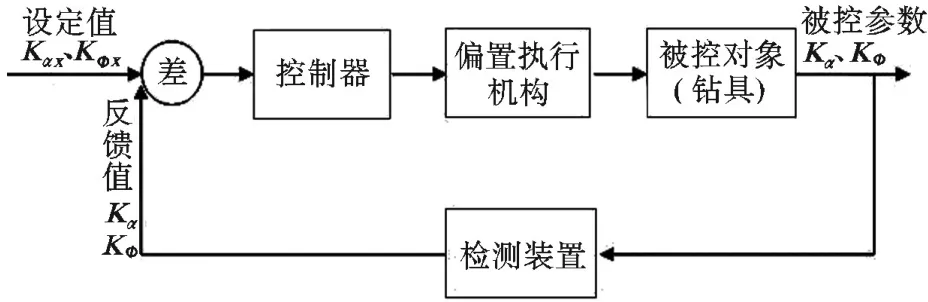
图6 轨道修正闭环控制系统
3 结论
(1)本文提出的三维井眼轨道模型能够充分反映出智能钻井的技术特点和需求,并具有通用性,可广泛应用于斜直井、定向井、水平井的轨道设计、监测及修正设计。
(2)文中的计算公式在数学上都是精确解,适用于设计由直线段和圆弧段所组成的各种井身剖面,这种新的数学模型和设计方法为智能钻井技术的推广和应用奠定了基础。
(3)完全智能钻井系统是未来水平井钻井技术发展的方向;智能井眼轨道可用于大面积规则储层和长条形储层;通过轨道修正闭环控制系统,可获得较好的井身质量。
[1]张绍槐.智能油井管在石油勘探开发中的应用与发展前景[J].石油钻探技术,2004,32(4):1-4.
[2]王以法.人工智能钻井实时专家控制系统研究[J].石油学报,2001(2):83-86.
[3]王以法.人工智能钻井系统展望[J].石油钻探技术,2000,28(2):36-38.
[4]吴克择,罗肇丰.90年代以来钻井技术进展与发展趋势[J].西南石油学院学报,1997,19(2):89-96.
[5]石崇东,张绍槐.智能钻柱设计方案及其应用[J].石油钻探技术,2004,32(6):7-11..
[6]石崇东,李琪,张绍槐.智能油田和智能钻采技术的应用与发展[J].石油钻采工艺,2005,27(3):1-4.
[7]刘修善.井眼井眼轨道几何学[M].北京:石油工业出版社,2006:180-18.
TP391
A
1004-5716(2015)06-0015-04
2015-01-21
2015-01-22
国家自然科学基金重大项目“页岩油气高交往开发基础理论研究”(编号:51490650);国家自然科学基金资助项目“基于热质流耦合的深层欠平平衡钻井井筒温度场和压力场分布规律研究”(51374077)。
闫铁(1956-),男(汉族),黑龙江肇州人,教授、博导,现从事油气井工艺理论与技术研究工作。
猜你喜欢
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年5期)2021-12-02
实用癌症杂志(2021年12期)2021-02-17
云南化工(2020年11期)2021-01-14
石油钻探技术(2020年4期)2020-10-09
河北理科教学研究(2020年2期)2020-09-11
石油钻探技术(2020年1期)2020-02-21
试题与研究·教学论坛(2016年16期)2016-07-02
西南军医(2016年2期)2016-01-23
天然气勘探与开发(2015年3期)2015-12-08
