船舶不同航行工况下船机桨配合特性分析
2015-12-14 06:28黄振华王树仁杨斌斌
船舶标准化工程师 2015年6期
黄振华,李 霏,唐 然,王树仁,杨斌斌
(中国卫星海上测控部,江苏江阴 214431)
船舶不同航行工况下船机桨配合特性分析
黄振华,李 霏,唐 然,王树仁,杨斌斌
(中国卫星海上测控部,江苏江阴 214431)
本文基于船机桨基本理论,以某远洋特种船舶动力系统实际运行参数为依据,讨论分析了该船动力系统在工作工况下的船机桨配合情况,针对其存在的问题,并结合测量船设备的实际情况,提出了改善方法。
测量船;船机浆配合
0 引言
航行在水中的船舶受到水的阻力,需要推进器提供推力来克服其所受到的阻力,使船舶能够保持某一稳定的航速,而推进器需要产生推力,这就需要船舶主机提供能量以克服推进器所消耗的能量,由此便形成了船—机—桨的能量转换系统。船舶推进系统中主机、传动装置、螺旋桨等都有各自的运动规律和工作特性,要使推进系统在最佳的状态下运转,实现推进装置的最佳能量转换,需要船—机—桨在船舶航行中有十分完善的相互匹配,实践证明,如果船机桨匹配不当,则会出现主机功率不足或者超负荷、敲缸拉缸等严重故障。
该船在航行的全过程中主机的运行工况主要分为航渡工况和工作工况。以工作时间100天为例,其分配情况见表1。航渡工况时,主机以80%至85%的额定功率、100%额定转速运行,航速为18kn至19kn。工作工况时,主机以25%额定功率、75%的额定转速运行,航速为12kn。在工作工况时,需要保持12kn的航速不变,此时船机桨的配合是否合适,主机推进装置工况是否良好直接影响主推进装置是否能稳定可靠运行,任务是否能顺利完成。

表1 主推进装置使用工况分配表
1 船机桨系统动力传递模型
船机桨系统实际上是一个能量转换系统,主机提供某一转速下的旋转力矩,通过传动装置和轴系将它们送至螺旋桨,克服螺旋桨相应转速下的阻力矩。螺旋桨实际上是一个能量转换器,将主机的旋转能转换为推力能。船机桨的配合是建立在船机桨系统运行相互平衡的基础上的,这种平衡关系表现在两个方面,即运动平衡和动力平衡。
在主机和螺旋桨之间考虑到传动装置及轴系的传递损失,按能量守恒原理和运动平衡,可得机桨之间的平衡条件为:

式中,MD为主机的转矩;i为减速比;Mf为推进装置阻力矩;MP为螺旋桨的力矩;J为轴系的总转动惯量;Js为螺旋桨附连水的转动惯量;ωP为螺旋桨的角速度;nD为主机的转速;nP为螺旋桨的转速。
在螺旋桨和船体之间,考虑到螺旋桨的伴流的影响,可得桨船之间的平衡条件为:
式中,ZP为螺旋桨数量;T为一个螺旋桨的推力;R为船舶阻力;m为船舶质量;ms为船舶的附加质量;VP、Vs为螺旋桨的进速、船舶航速;ω为螺旋桨伴流系数。
2 船、机、桨三者特性及稳态配合
2.1 船舶的阻力特性[1]
船舶在航行时,受到水的阻力R的作用,理论研究表明,一般排水型船舶的阻力特性可近似的表示为:

R为阻力系数。取决于船体的排水量、线型、污底程度、航道情况、风浪大小等因素。对于一艘确定的船舶,主要取决于航行海况。Vs为船舶的航速。
2.2 螺旋桨特性
2.2.1 相对进程
螺旋桨在静水中每转动一周实际前进的距离为进程,即:

式中,VP为螺旋桨在静水中的前进速度;np为螺旋桨的转速。
相对进程是螺旋桨每转动一周时前进的实际进程hp与该螺旋桨的直径的比值,用λP表示,即:

相对进程反映了螺旋桨工作时的轴向“滑脱”程度。对于一个既定的螺旋桨而言,其直径是常数,因此相对进程表示了螺旋桨的前进速度与螺旋桨转速之间的比例关系。相对进程是反映螺旋桨运转工况的一个重要参数。
2.2.2 螺旋桨的水动力特性
螺旋桨旋转时会产生推力和阻力矩,当其相对进程与转速一定时,产生的推力和阻力矩的大小也是一定的。这是螺旋桨本身的固有性能,称为螺旋桨的水动力特性。研究表明,螺旋桨产生的推力和阻力矩与它的结构参数和运动参数有关,即:

TP为螺旋桨推力;MP为螺旋桨的阻力矩;ρ为海水密度;D为螺旋桨直径;KT为螺旋桨的推力系数;KM为螺旋桨的转矩系数推力系数和转矩系数。除了与螺旋桨的螺距比、盘面比、叶片数、截面形状等结构参数有关之外,主要与螺旋桨的运行状态参数——相对进程有关。
2.2.3 螺旋桨的敞水作用曲线
推力系数KT和转矩系数KM随相对进程λP的变化规律称为螺旋桨的敞水作用曲线,如果将其在常用范围内作简单线性化近似处理:
其他结构参数完全相同而螺距比不同的螺旋桨,有各自的作用曲线,且互不相同。
2.3 柴油机外特性
为了使柴油机安全可靠的工作并达到一定寿命,对柴油机的工作范围必须加以限制,各种限制构成的区域即为柴油机的允许工作范围。这些限制主要来自最高负荷限制、最低负荷限制、最高转速限制、最低转速限制。图1是第三代测量船主机瓦锡兰8L46C柴油机的允许运行范围(单缸)。

图1 瓦锡兰8L46C柴油机单缸运行图
从功率—转速的关系图中可以看出最低转速限制为350r/min,最高转速限制为516r/min。最高负荷限制1050KW。虚线为名义推进曲线即为各转速下的负荷限制线。白色区域为持续工作区域,灰色区域为短暂工作区域,不能长时间在此区域内运行。在调距桨的配合下,在最低和最高转速之间,没有最低负荷的限制,在白色区域内,机桨可在任何一点稳定配合。
3 船舶不同工况下的船机桨配合分析
该船采用双机双桨的动力形式,单机最大持续功率 MCR(Maximum Continuous Ratings)为8400kw,标定转速 500r/min。齿轮箱变速比为4.136:1。螺旋桨采用5叶调距桨,螺旋桨标定转速为120.9r/min,最佳设计效率为0.685,螺旋桨直径D 为 5.4m,盘面比 AE/AD=0.679,螺距比为P/D=1.073(变距分布)。
该船主机运行的控制方式分为联控和分控,在驾控模式下,采取联控方式,螺距和转速的配合关系(正车)见表2。
下面利用该船在不同工况下主推进装置的运行参数作出主推进装置在不同工况下的运行曲线。
表3至表6是联控模式下手柄格数分别从+40至+100的运行参数。
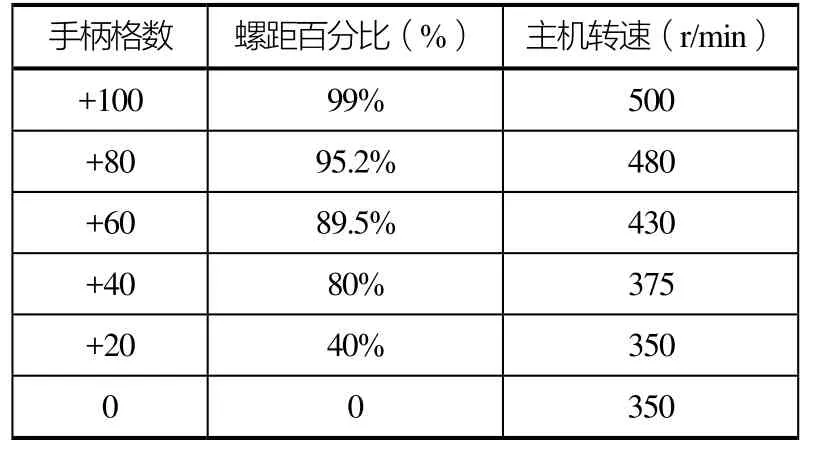
表2 联控方式下的转速和螺距匹配表

表3 手柄格数为+40时的运行参数

表4 手柄格数为+60时的运行参数
取各个数据的平均值可以分别得到不同手柄格数下的推进特性的比例系数为:Kp4=0.0028;Kp6=0.0037;Kp8=0.004;Kp10=0.0039。由此可以作出主推进装置在不同工况下主机和螺旋桨的配合曲线,如图2所示。

表5 手柄格数为+80时的运行参数
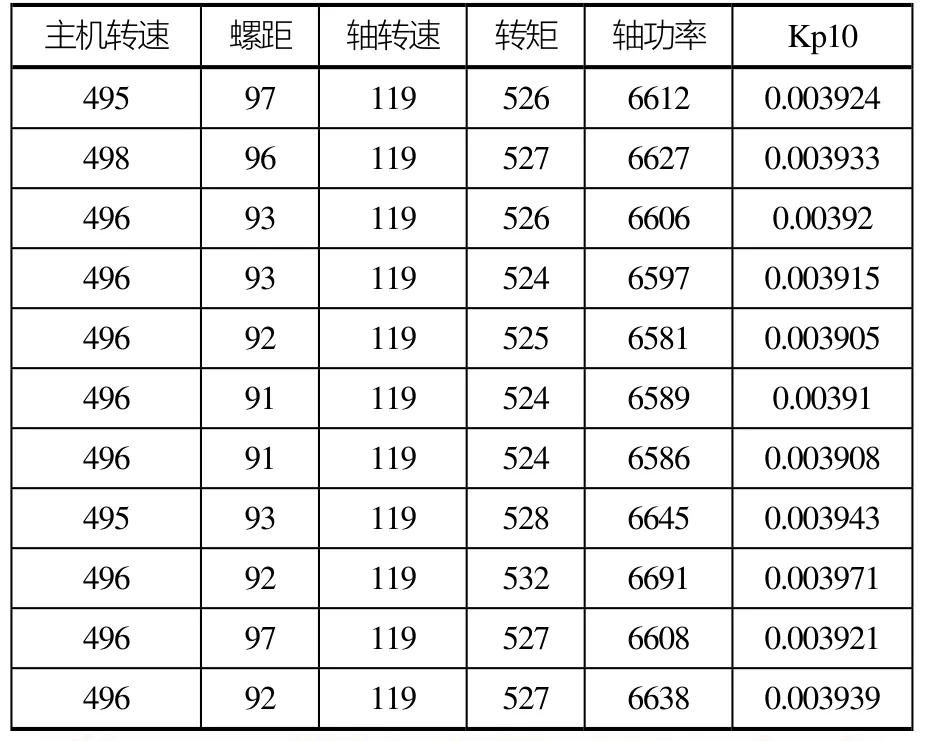
表6 手柄格数为+100时的运行参数

图2 不同工况下主机和螺旋桨配合曲线
从图2中可以看出,在联控方式下,主机和调距螺旋桨并没有沿着某一条固定的推进特性曲线改变配合点,考虑到燃油消耗率,螺旋桨推进效率等因素,联控方式下,配合点沿着图中红色配合点组成的一条曲线变化。
4 某船测量工况下机桨配合形式的改善方法
在船舶工作时,为保持12节的航速,主机一般在375r/min转速和25%额定功率下工作,即图中+40配合点。在实际工作中,发现主机在这个转速下出现以下问题:管系震动强烈、各缸排温不均匀、总排温较高。究其原因是柴油机以很低的转速运转时也会带来各种危害:燃料喷射压力过低、雾化不良,从而恶化了空气与燃料的混合,使燃烧不完全,积炭严重;各轴承润滑情况会变坏;各缸供油量的不均匀度显著增加,甚至个别缸不能保证发火燃烧。还有一些情况下某些附属泵的排量在转速过低时也不能保证柴油机在该转速下运转的需要。
某船主机的排温与转速之间的对应关系见表7。

表7 转速与排温的对应关系表
为了改善机桨配合情况,解决排温和燃烧工况等问题,保证主机处于更好的可靠稳定运行状态,可以有以下几种其他机桨配合的处理方式。
4.1 单机运行
由于双机运行时,单机功率输出只有25%,所以考虑单机运行,另一台主机处于一键启动状态。单机运行时,由于不工作螺旋桨的附加阻力的影响,单机实际功率要大于50%,此时,单机转速较高,工况也较好。这种处理方式存在其优缺点。其优点是:主机在略大于50%的工况下,燃烧工况、排温都较好;而缺点为:船舶工作时,若工作主机出现故障,另一台主机从启动到保持船舶12节的航速,需要一定时间,可靠性略有降低。
4.2 改联控模式为分控模式
由于螺旋桨为调距桨,在可运行区域内的任何一点均可稳定运行,因此可以采用分控方式,使主机转速保持在430r/min左右,功率为25%的额定功率。这样能使得主机的喷油效果更好,燃烧工况和排温得以改善,配合点见图3。
图 3中三角形表示出了新的配合点转速为480r/min,功率为25%额定功率。这种方式的优点为:改善了燃烧工况和主机排温,且保持了可靠性;缺点是:燃油消耗率高,螺旋桨推进效率低,有较大的剩余功率。
Performance Analysis of Paddle Boat Machine under Different Ship Sailing Conditions
Huang Zhen-hua,Li Fei,Tang Ran,Wang Shu-ren,Yang Bin-bin
(China Satellite Maritime Monitoring Department,Jiangsu Jiangyin 214431,China)
In this paper,based on the basic theory of ship engine propeller and real operation data of a pelagic special ship power system,discussed and analyzed the power system of the ship engine propeller in working conditions with the situation,to solve the existing problems,and combining with the actual measurement of ship equipment,proposed the improvement method.
measure ship; hull-engine-prop relations
U664.81
A
10.14141/j.31-1981.2015.06.008
黄振华(1988-),男,工程师,研究方向:船舶电气设备。
猜你喜欢
现代畜牧科技(2021年4期)2021-07-21
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
流行色(2020年9期)2020-07-16
家庭影院技术(2018年9期)2018-11-02
中学科技(2017年10期)2017-11-04
CHIP新电脑(2017年6期)2017-06-19
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09