雷达技术在汽车防撞安全系统的应用
2015-12-13 10:39付晓海
中国科技纵横 2015年10期
付晓海
(上海航天技术研究院,上海 201109)
雷达技术在汽车防撞安全系统的应用
付晓海
(上海航天技术研究院,上海 201109)
随着社会的进步,汽车是越来越普及,它给人们带来便利的同时危害也越来越大。为了提高行车的安全性能,各种先进技术应用在汽车上。本文重点研究了雷达技术在汽车主动安全领域的应用,对毫米波雷达应用到汽车安全系统的优势、工作原理、工作方式做了详细的分析,并指出了汽车防撞雷达的技术突破方向。
防撞雷达 汽车安全 测距测速
ITS(Intelligent Transportation System,智能交通系统)是通过现代化信息、通信等技术使用户、车辆和道路密切配合,和谐统一,是目前世界上交通运输科学的前沿技术,能够使人们或货物更高效、更快捷的流动。美国交通部研究认为,该系统每年可减少120万次交通事故,大约可节省260亿美元因交通堵塞及事故造成的损失。近年来,雷达技术在汽车主动安全系统得到了较好的应用,自适应巡航系统、侧向辅助系统是可以主动辅助司机进行安全驾驶的主动安全系统,也是ITS中非常重要的组成部分,汽车前防撞雷达是其核心部件,能够准确测出前方目标的速度和距离,按照已设定的报警参数向司机发出警报,并可以自动采取措施消除危险,对提高交通安全,降低交通事故发生、减少生命财产损失将起到重要作用,成为近年来研究与发展汽车安全系统的主流技术。国际上主要整车生产企业如丰田、宝马、福特和通用等公司投入大量资金和技术研制汽车防撞雷达系统,并成功开发出能够商业化的系统产品。随着中国汽车产业的快速发展,汽车消费的普及,交通拥堵已成为各大城市的普遍现象,加之经常出现的雾霾、大雾天气,能见度低,造成我国交通事故频发,制约中国交通运输的发展,汽车防撞雷达技术的突破及产业化应用将大幅减少交通事故,提高交通运输效率。
1 汽车防撞雷达发展历程
国外对毫米波汽车防撞雷达的研究始于20世纪60年代,研究主要以美国、德国和日本为代表的发达国家内展开。截止目前,从时间上大致可分为两个阶段。
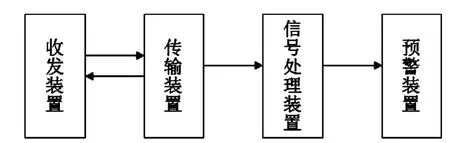
图1 毫米波雷达的系统结构图
第一阶段:从20世纪60年代至70年代末期,此阶段的特点是微波理论水平较低,电子器件集成技术落后,系统加工成本高,各国对于防撞雷达的性能要求缺少统一的标准,各国研制出的防撞雷达样机的应用效果差异较大。1969年,英国Lucas公司研制出中心频率为24GHz的FMCW(Frequency Modulated Continuous Wave,调频连续波)毫米波雷达,但由于技术的限制,雷达尺寸较大,受当时微波技术发展的限制,到70年代发展一直很缓慢。
第二阶段:从80年代中期至今,随着微波技术理论及其器件集成技术的高速发展,以及微处理器价格的降低,研制低成本、高性能的防撞雷达成为可能。各个国家的ITS计划全面启动,对于防撞雷达的性能要求也大致达成了共识。进入90年代后,德国在该领域的研究处于领先地位。1997年Benz公司的汽车防撞雷达系统荣获了德国的工业革新大奖。该雷达系统采用FMCW体制,工作频率76GHz,发射功率3MW。雷达接收的目标反射信号通过信号处理器进行分析,根据信号处理结果自动控制汽车减速,跟前方目标保持一定距离。该雷达的有效探测距离为150米,能够同时跟踪30个目标。
此外,美国TRW公司、Delco公司、日本丰田公司、三菱公司和Denso公司、法国AutoCruise公司也开发出防撞雷达产品。由于该系统研制成本高,目前世界上装配防撞雷达的汽车产品不多,仅在少量高档豪华汽车上配备使用,如Benz的S系列、捷豹的XKR系列、Lexus的430系列、Audi的A8系列,以及凯迪拉克的DTS系列。
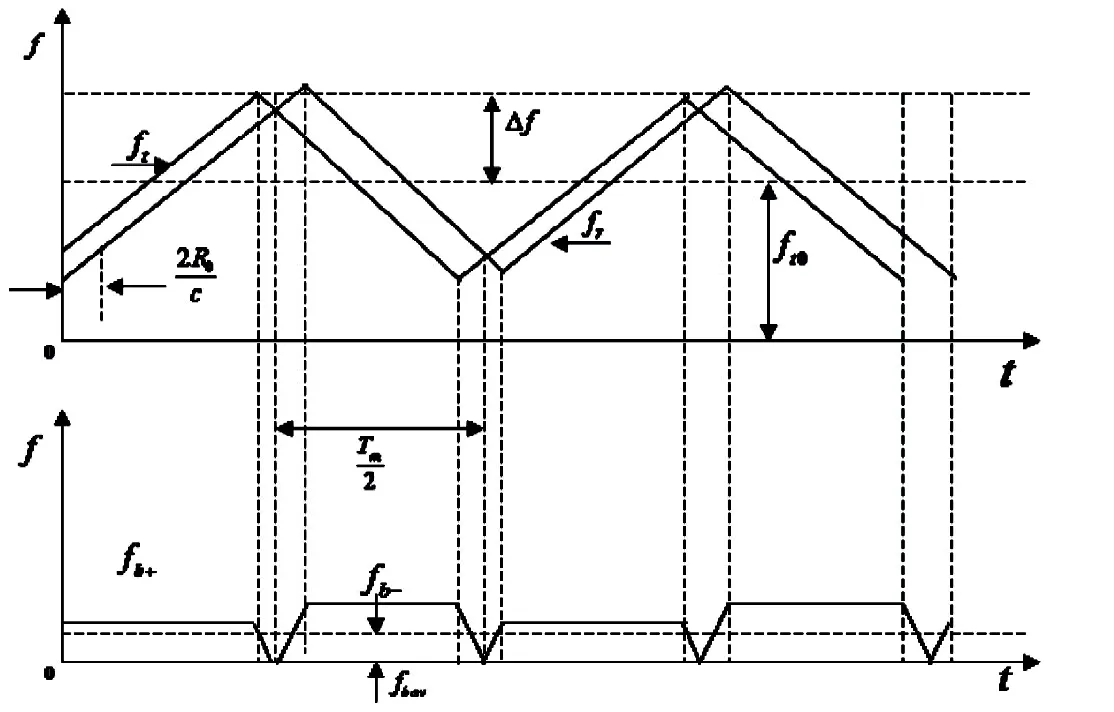
图2 双天线毫米波雷达的结构框图

图3 三角波频率调制雷达工作原理图
国内对汽车防撞雷达系统的研究起步较晚,目前,在汽车防撞方面只局限于倒车雷达的研究与生产,至于前向探测雷达,尚处于初级阶段。我国于 20 世纪 90 年代开始进行智能交通系统(ITS)的研究,并在 2000 年成立了政府协调领导机构—全国智能运输系统(ITS)协调指导小组及办公室,旨在发展中国的 ITS,与此同时还成立了智能交通系统专家咨询委员会。很多国内研究学者也对此进行了深入的研究,研究内容主要围绕行车安全距离模型展开,并取得了一定的成果。目前国内有中国科学院上海微系统与信息技术研究所、清华大学、南京理工大学、山东大学等研究机构正在对汽车防撞系统进行研究,但尚处于起步阶段,研制的样机大多处于实验室阶段,雷达系统的体积、功能和可靠性与国外都有较大的差距,达到市场应用阶段还有一定距离。
2 汽车主动防撞预警系统构成
汽车主动防撞预警系统所采集的信息包括自车信息和前方目标信息。自车信息包括:自车车速、方向盘角度、制动踏板位置、节气门开度和路面附着状况等信息;目标信息包括:利用毫米波雷达传感器对前方目标进行精确定位和分类信息。将自车信息和目标信息发送到CAN总线上,传递到车辆电子控制单元(ECU)的防撞系统控制模块,防撞系控制模块根据所采集的信息,作为输入信号输入到模块的规避控制模块,对所检测目标进行危险等级分类。根据危险等级的不同,ECU发出三类不同危险程度的指令,控制执行机构的动作。临界危险目标发出报警信号,报警系统工作;危险目标发出减速信号,减速系统工作;极限危险目标发出制动信号,制动系统工作。最终达到提醒或协助驾驶员做出合理的驾驶行为,对车辆的控制还是由驾驶员自己决定。
在汽车主动防撞预警系统中,毫米波雷达测量前方车辆、护栏、人员的距离和速度,分辨出不同的目标,哪些是危险目标、哪些是安全距离目标等是防撞预警系统的关键技术,目标识别的正确与否可大幅降低虚警的数量,避免影响汽车的正常行驶,因此,车用测距雷达是各大整车企业、研发机构正在努力突破的关键技术。
3 防撞雷达测距测速的原理
随着电子技术的快速发展,先后出现的车用雷达有红外线雷达、激光雷达、超声波雷达、机器视觉雷达和毫米波雷达。红外线雷达、激光雷达、超声波雷达容易受外部环境影响产生偏差;机器视觉雷达价格高昂、较慢的成像速度及对软、硬件的高要求阻碍了其发展。毫米波雷达测量距离的理论基础是电磁波反射原理,毫米波是一种电磁波,其波长较短一般小于 10mm,频率很高介于30GHz 到300GHz之间。根据电磁波形式的不同,毫米波雷达分为脉冲式和调频连续波(FMCW)式两种。一般情况下,车辆防撞预警系统采用的是30GHz 以上的调频连续波式毫米波雷达。它具有波长短,穿透能力强的特点。即当所发射的斜率一定的连续调频波信号遇到前方测量目标时会反射包含目标信息回波,系统通过将往返信号进行混频处理得到差频信号,从而计算得到目标的速度和相对距离。
3.1 防撞雷达的系统结构
毫米波雷达一般由四部分构成,包括收发装置,传输装置,信号处理装置和预警装置。如图1所示,为毫米波雷达的系统结构图。
其中,收发装置指的是发射天线和接收天线;传输装置包括信号源、压控振荡器、定向耦合器、发射机、接收机和混频器;信号处理装置包括放大器、滤波器、A/D 转换和信号处理;预警装置包括报警和显示。
防撞预警雷达的收发装置采用双天线结构形式。双天线结构拥有发射和接收两个天线,很好的实现了收发隔离,对探测性的影响较小。如图2所示,为双天线毫米波雷达的结构框图。
3.2 测距测速原理
FMCW 信号的载波频率与时间呈线性关系,通过对称三角波对信号进行调制来获得所需的信号波形。发射频率通过三角波调制之后得到的频率变化规律如图3所示:
图中tf表示雷达信号发射机产生的较高频率的发射频率,其在一个周期内的均值频率为 ft0,三角波变化的周期和 ft0变化的周期同为 Tm。 fr表示目标截获发射电磁波之后反射回来的信号频率,fr和 ft有着相同的变化规律,但从时间方面来看 fr相对于 ft会有tR的延迟, tR= 2 R0/c。 ft经过三角波调制后获得的频率偏移的最大值为 ± Δ f, fb表示发射和接收信号的频率差值, fbav来代表其频率差值的均值:
如上图所示,tf与rf的关系为:
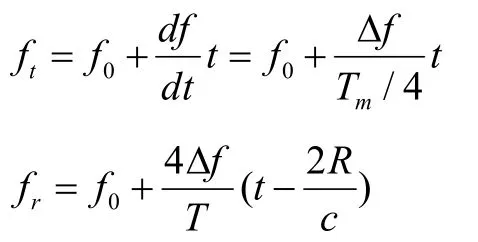
差频bf为:
调制频率处于下降阶段的半个周期内, d f/dt的值小于零, fr大于 ft,但是两个信号的频率差依然满足式(1)。然而与雷达相距为R的目标返回的电磁信号,在时间上忽略掉 2 R0/c这段时间之后(在2 R0/c区间当中出现的差频频率分量很小)余下的这部分差频是一个固定值。因此在三角波调制的 Tm的时间内差频均值 fbav有:
在实际的雷达测距应用中,应当保证距离测量值的单一性,因此mT应当满足如下条件:
上式便可以得到目标距离 R为:
在式中 fm= 1/T,为调制的频率。
当目标运动时,如果目标与雷达相距 R,目标拥有的径向速度为 v,则运动目标返回的信号频率为:
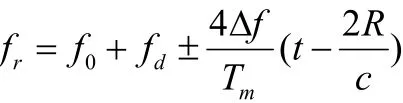
fd表示多普勒频率,正号表示三角波调制信号前半周斜率为正的方面,负号表示三角波调制信号后半周斜率为负的方面。当fd< fbar时,获得的差频为:
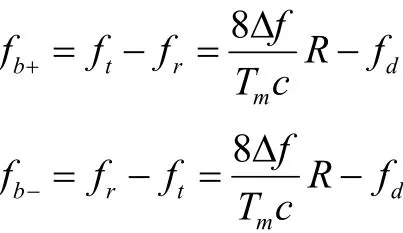
可求出目标的距离为:
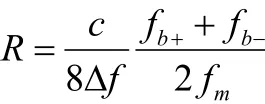
如果测量得到bf+和bf-的值,便可通过计算得到运动目标径向速度:

4 汽车防撞雷达技术突破方向
············
随着社会的发展和汽车数量的逐年增加,特 别是未 來智能汽车的出现,将极大的改变我们现有的生活方式。智能汽车是建立在汽车巡航雷达的基础之上的,因此汽车防撞雷达是今后一个重要的发展方向。但由于环境的复杂性,汽车防撞雷达系统面对道路情况更多也更加复杂,需要考虑道路的平整性、崎岖山路、急转弯、涉水道路、隧道、桥梁、周边行人、护栏、绿化带、树木、广告牌等复杂情况以及道路的各种突发情况等做出正确的反应,这些都是汽车雷达需要考虑的问题。因此,如何提高汽车雷达在实际运行当中的准确度、稳定度和实时性,成为了防撞雷达数据处理所面临的问题,未来的技术突破方向主要有:
(1)汽车防撞雷达在实际测试当中接收到多种噪声的干扰,特别是当目标距离较远时情况会变得更加严重,甚至影响目标的识别,出现虚假目标等情况,因此需要对噪声的抑制进行更深入的研究。
(2)由于汽车在实际工作当中时常遇到各种突发情况,对于汽车防撞雷达来讲实时性的要求非常高,因此在实时性方面也需要有进一步的提升。
(3)汽车雷达的探测不能单一地获得前方目标的信息,还应获得汽车周边物体的多种信息才有助于提高系统的安全性。因此,在汽车的左右方向与后方都应有相应的雷达设备,最大限度地保证系统的安全性与可靠性。
5 结语
汽车防撞雷达技术含量高、涉及学科门类广,需要国内各领域的企业通力合作,突破关键技术,尤其要开展机械扫描、透镜、相控阵等天线形式的雷达及微波组件的研制。同时,雷达组件的研制是建立在国家微电子产业的基础之上的,而我国的微电子产业发展滞后,无法为国内提供高质量、低成本的微电子产品。而向国外定制采购将大幅提高产品成本,影响国内企业的竞争力。因此,需要我国加快提升微电子生产、组装的技术水平,与国内汽车防撞雷达研发单位同步发展,为我国开展汽车防撞雷达的生产提供基础条件,研制出具有自主国内知识产权的汽车防撞雷达,顺利参与全球竞争。
[1]戎辉,龚进峰,等.智能安全车辆技术前沿跟踪.中国汽车技术研究中心,天津:2010.
[2]邓湖明.汽车巡航雷达信号处理单元研究与实现.西安:西安电子科技大学,2014.
[3]韩星.基于毫米波雷达的汽车主动防撞预警目标识别.吉林:吉林大学,2013.
[4]姚丁茂.大客车防撞预警系统仿真平台的开发研究.长安:长安大学,2014.
猜你喜欢
大自然探索(2023年7期)2023-08-15
天天爱科学(2020年6期)2020-09-10
小学生学习指导(低年级)(2018年12期)2018-12-29
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
中国公路(2017年13期)2017-02-06
美术文献(2016年6期)2016-11-10
火控雷达技术(2016年3期)2016-02-06
民用飞机设计与研究(2015年3期)2015-12-07
百科探秘·航空航天(2015年4期)2015-11-07