变自由度机构的探究及应用
2015-12-10 09:05樊晓璇张延强冯立艳
山东工业技术 2015年24期
樊晓璇+张延强+冯立艳
摘 要: 通常条件下,机构在运动中的自由度是不改变的。然而在学习与工作中,经常会遇到自由度变化的机构。笔者结合应用实例深入分析了造成自由度改变的原因、机构的功能以及自由度变化的目的。本研究无疑为将来设计出运行稳定、环境适应性更优良的新机构打下基础。
关键词:自由度;机构;创新应用
DOI:10.16640/j.cnki.37-1222/t.2015.24.255
1 前言
机构自由度是机构具有独立运动的数目。当自由度与原动件数相等时,机构具有确定的相对运动。一般机构的自由度是一定的,但一些机构在运动过程中具有变化的自由度,这便是变自由度机构。这种机构的出现,备受人们的关注,非常值得探讨。它通过自由度的改变,以实现多种结构形态,并在很多领域得到应用,可以更好地满足对于外界工作对象、环境等不确定状态下的适应性要求。但目前缺乏对这种机构的深入研究。笔者分析了这种机构自由度改变的原因、自由度可变机构的用途及优点等内容,希望对同行了解此类机构有所帮助。
2 机构变自由度的成因
2.1 活动构件数的改变
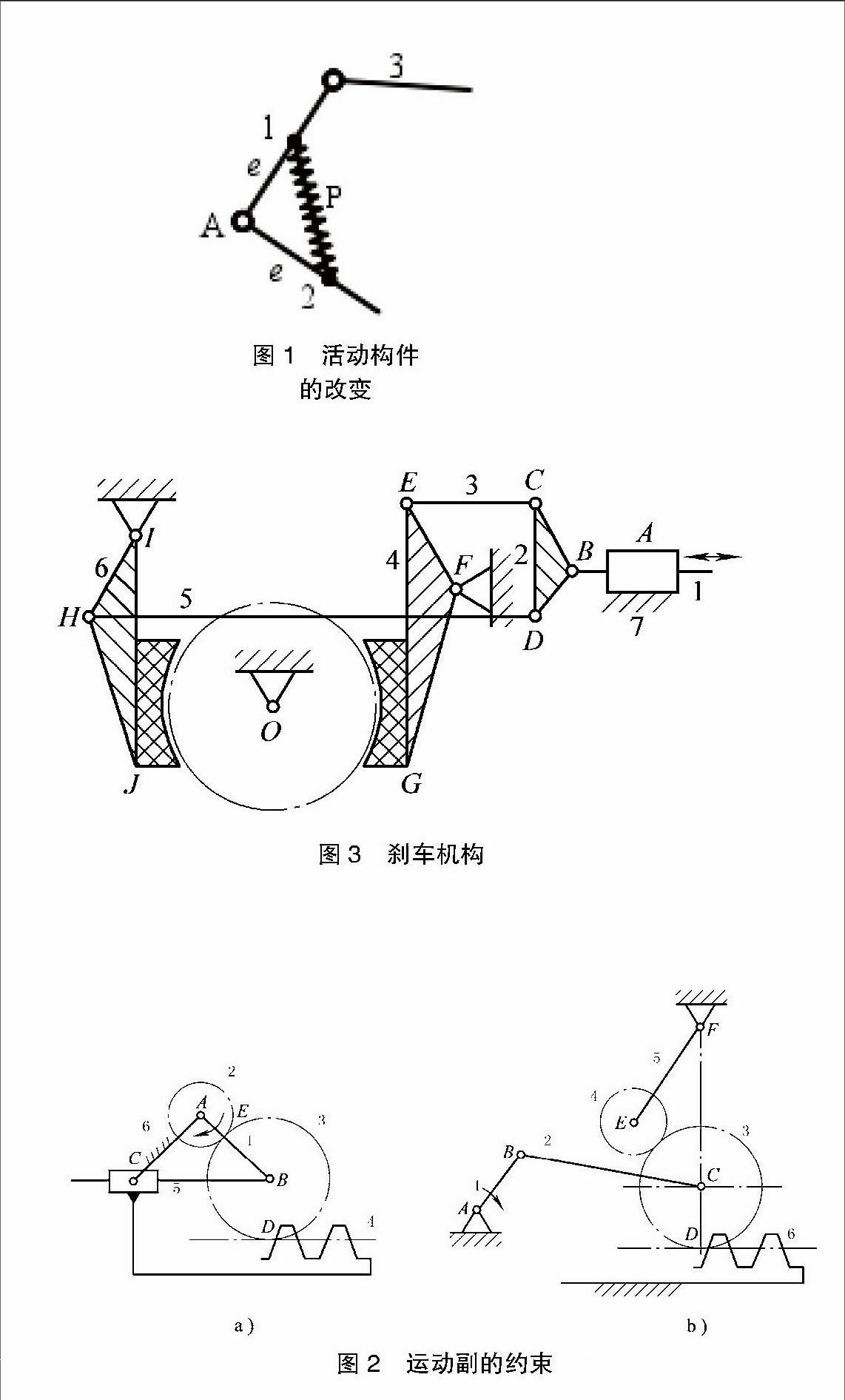
通过机构内力的传递、变换与平衡等使活动构件数发生变化,从而改变该机械系统的结构,使自由度发生改变。如图1所示,若靠弹簧力使1和2之间保持一定的角度不变,则1和2成为一个活动构件;但当外力大于弹簧力时,1和2之间会产生相对转动,此时1和2便成为两个活动构件,增加一个自由度。
2.2 运动副约束个数的改变
以齿轮副为例,通常为一个高副,但有时则为两个高副。如果一对齿轮副的两轮中心相对位置被约束,则这对齿轮副仅提供一个约束,即为一个高副;而当一对齿轮副的两轮中心相对位置未被约束,则这对齿轮副将提供两个约束,即两个高副[1]。如图2a中,齿轮2与齿轮3的中心A、B被杆1约束,此时两齿轮轮齿为单侧接触,且无论这对齿轮的重合度为多少,有几对齿参与接触,由于过各接触点的公法线均重合,故只能算一个高副。同理齿轮3与齿条4之间也为一个高副,则机构自由度F=3×5-2×6-2=1。如图2b,齿轮3与齿轮4未被约束,为无侧隙啮合,齿轮3与齿条6之间也未被约束,故每个接触点处算作两个高副,则F=3×5-2×5-4=1。
3 变自由度机构的实际应用分析
3.1 变自由度的刹车机构
图3为一刹车机构[2]。刹车时操作杆1向右拉,此时连杆刹车系统处于未刹车状态,自由度 F=3×6-2×8=2,自由度数大于原动件数,所以不能确定它的运动。紧接着当一侧的侧闸(G,J)瓦先与车轮接触,两侧闸瓦之一压紧车轮时,4或6成为机架,此时F=3×5-2×7=1 ,直到刹住车轮;两侧闸瓦均压紧车轮时,4和6均为机架,此时F=3×4-2×6=0。 此机构的优点在于当车轮由于磨损等原因偏离工作位置时,也能安全有效的完成刹车动作。
3.2 后桥差速器机构
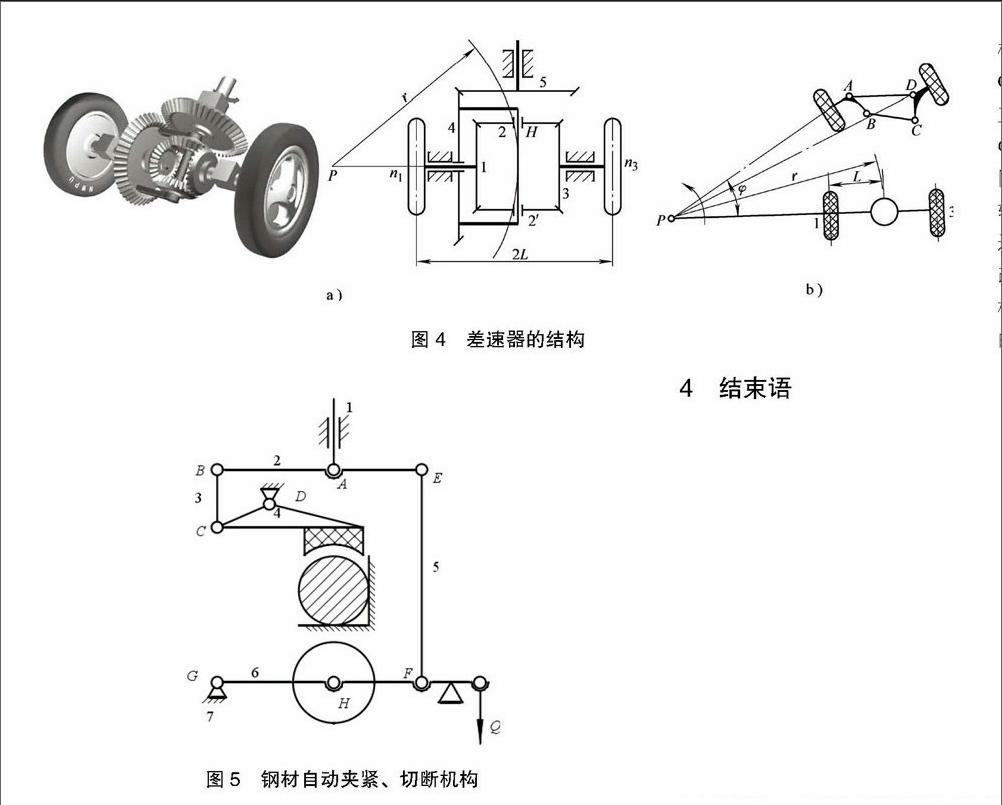
如图4所示是应用于汽车中的后桥差速器,也是变自由度机构[3]。其自由度为 F=3×5-2×5-3=2。当直线行驶时,左右两个轮受到的阻力一样,行星齿轮2、2不自转,把动力传递到两个半轴上,这时左右车轮转速n1=n3,两轮滚过的路程相等,因此其自由度变为1。而汽车在转弯过程中,因4个车轮绕图中的P点做纯滚动,故轮1轮3行程不同,转速n1=(r-L)n4/r、n3=(r+L)n4/r也不相等,这两种情况下,借助于外界条件使得机构自由度均为1。该机构利用可变化的自由度,适应了直线行驶、向左转弯、向右转弯时的转速变化。
3.3 钢材自动夹紧、切断装置
如图5所示为钢材自动夹紧、切断装置。机构在初始状态时,活动构件数为6,其自由度F=3×6-2×8=2。工作开始,铅垂载荷Q竖直向下拉杆6。第一阶段原动件杆1向上拉,由于载荷Q的作用,杆6不动,相当于机架,杆2在杆1的拉动下做平面运动,带动杆3也做平面运动,杆3拉动杆4绕固定铰链D顺时针转动,压紧钢材,机构自由度F=3×5-2×7=1,此时机构为单自由度6杆机构。第二阶段,杆4不动,相当于机架,在杆1的驱动下,杆2继续做平面运动,此时通过铰链E拉动杆5,杆5与杆6在F点铰接,当杆5作用在F点的力对G点的力矩大于载荷Q对G点的力矩时,杆6开始绕G点逆时针转动,使圆盘锯H接触钢材并将其切断,此时机构自由度F=3×5-2×7=1。第三阶段为反行程,杆1向下运动,杆6绕转动副G顺时针转动,使圆盘锯退回,直至与限位挡块接触,在载荷Q的作用下,杆6成为固定件,同时杆4绕固定铰链D逆时针转动,松开钢材。该实例表明通过控制运动件的限动方式,改变系统的自由度数,可以使机械系统完成工艺所要求完成的顺序动作[4]。
4 结束语
本文以刹车机构、后桥差速器机构及钢坯自动夹紧切断机构为例,研究变自由度机构在工作过程中自由度的变化情况,分析了自由度变化的原因和起到的作用。它们能更好地满足外界工作对象、环境等不确定状态下的适应性要求。通过对典型可变自由度机构的分析和讨论,为将来设计出工作更可靠、性能更优良的新机构打下基础。
参考文献:
[1]冯立艳.机械原理[M].北京:机械工业出版社,2012.
[2]孙桓,陈作模.机械原理(第七版)[M].北京:高等教育出版社,2001.
[3]陈海珍.可变自由度连杆机构的分析与综合[D].四川大学硕士论文,2005.
[4]曲继方,安子军,曲志刚.机构创新原理[M].北京:科学出版社,2001.
作者简介:樊晓璇(1994-),男,河北宣化人,本科,研究方向:机械设计制造及其自动化专业。endprint
猜你喜欢
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
戏剧之家(2016年21期)2016-11-23
艺术科技(2016年9期)2016-11-18
艺术科技(2016年9期)2016-11-18
文理导航(2016年30期)2016-11-12
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
股市动态分析(2016年29期)2016-08-04