
基于BP神经网络的柔性T—BOX解码方案的研究
2015-12-08 13:21董长青任女尔田杨
电脑知识与技术 2015年25期
关键词:BP神经网络
董长青++任女尔++田杨

摘要:随着车联网的迅速发展,车载T-BOX(Telematics BOX)、TSP(Service Provider)相关业务也急速膨胀;随之而来的问题是各个供应商在信息传输中协议不同,严重阻碍了车联网全网互联的进度。本文通过研究BP神经网络在解码过程中的应用方案,提出了柔性T-BOX解码方案,以解决在车联网远程监控过程中车辆协议不统一而无法追踪和监控的问题。
关键词:车载T-BOX;BP神经网络;柔性解码
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2015)25-0149-03
The Research on Flexible T-BOX Decoding Scheme Based on BP Neural Network
DONG Chang-qing, REN Nv-er, TIAN Yang
(Chinese Automotive Technology & Research Center, Tianjin 300300, China)
Abstract: with the rapid development of the vehicle network, the business about T-BOX (BOX Telematics), TSP(Service Provider) is also rapid expanded; the problem is that the suppliers are various on the information transmission protocol, which seriously hindered the progress of the whole vehicle networking. This paper will study the application of BP neural network in decoding, and propose a flexible T-BOX decoding scheme, in order to solve the problem that the vehicle protocol is not unified and unable to track or monitor in the process of vehicle remote monitoring.
Key words: vehicle; T-BOX; BP neural network; flexible decoding
物联网的发展带动了车联网、智能交通的迅速崛起,车联网一般通过GPS、传感器、CAN模块等采集车辆自身及其环境的相关信息, 再通过互联网传送到计算机,进而可以对车辆的信息数据进行挖掘和分析,最终实现对路线和路况评估和建议、安排信号灯等工作【1】。然而车联网飞速发展的同时,国家相关法规尚未强制规定车载终端和远程监控分析中心的协议,仅强制规定如新能源车辆、客车等需具备实时监控的功能。因此现行的T-BOX终端虽然大多数在网络传输协议上采用TCP/IP协议,但具体内容往往采用了不同的车载终端协议。比如,北京市规定了电动汽车远程监控需采用推荐标注JT/T 808-2011作为通信格式的标准,而有的企业则采用自定义的一些协议,只要保证监控端与车载终端的协议一致,则不影响内部通信和管控。因此,解决协议中数据格式不一致的问题,将是车联网发展的重要环节。
1 T-BOX及其协议
1.1 T-BOX与车联网架构
车联网主要包括车载T-BOX、终端主机、手机应用以及远程后台,如图1所示:
其中,终端主机主要负责显示信息和多媒体娱乐,T-BOX通过CAN总线与终端主机互联从而显示信息;而CAN中线可以通过指令获取车辆的各种实时信息,并且可以控制车辆,如获取车门关闭状态、启停状态等;T-BOX外围配置GPRS可以实现3G通信、GPS实现定位信息获取及其他传感器等,网络传输协议使用TCP/IP协议。远程后台扩展性较强,可以通过具体协议与T-BOX间实现信息获取和控制。获取信息以后进一步挖掘从而分析路况和路线等信息。
1.2 T-BOX远程控制原理
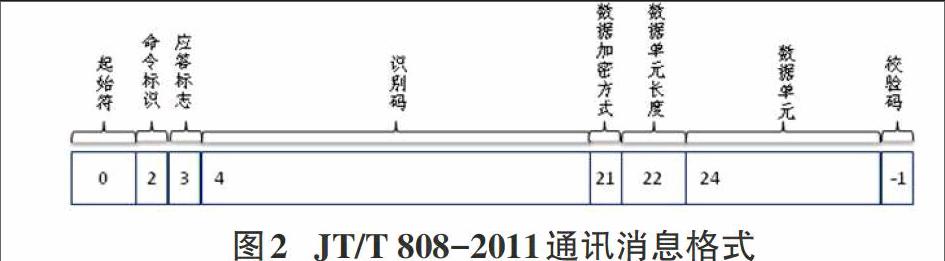
在TCP/IP基础之上,指令识别协议一般需要规定具体的数据类型、数据端模式、消息起止符、消息头、转义字符,以及具体的指令位置等内容。如在JT/T 808-2011协议中规定了BYTE、WORD、DWORD、BYTE[n]、STRING这5种数据类型,采用大端模式传递字和双字,如下所示消息格式。其中数字代表消息的起始地址,以字节为单位,消息头共22BYTE。
在数据传输中,按照数据单元长度不固定,根据命令标识进行变换,校验码为最后一位,采用BCC异或校验的方法保证数据传输的有效性。命令标识定义了0x01到0xFE指代含义及其传输方向为上行还是下行,总体采用请求应答的模式进行数据交互,远程后台发送命令给终端为下行数据,终端发送为上行数据。比如当远程终端设置参数下行命令,命令标识为0x81,应答标志为0xFE(为命令包,否则为应答包),数据单元格式填写BYTE[6]设置时间,一个BYTE为参数总数,然后是参数项列表,设置参数上报周期参数代号0x02,值为WORD;当终端收到该指令时,回复应答指令。这样就完成了终端参数设置的数据传输操作。
除了808协议中规定的内容,开发商可以自定义通讯格式,甚至可以不遵循808协议进行通讯,只要远程后台和车载终端之间协定好即可。格式的多样化阻碍了车辆网的发展。
2 BP神经网络
2.1人工神经网络
人工神经网络通过模拟人的大脑突触活动实现了很难直接解决的实际问题,其算法智能型极高,因此在各行各业得到广泛的应用。它定义了神经元模型作为基本的衡量和计算单元,其通过计算输入向量经过权向量处理后的内积,从而把N维向量两极化为超平面的哪一边【2】。在此基础上,通过建立神经网络模型和激活函数,将输入数据传入对应的激活函数,经过网络模型的处理得出结果。网络模型中,有向前网络和反馈网络。神经网络应用领域主要有以下方面:
1) 信息领域:信号处理和模式识别;
2) 医学领域:专家系统及生物信号检测;
3) 经济领域:价格预测和风险评估;
4) 控制、交通、心理学等领域。
其主体应用防线主要为评估和预测。
2.2 BP神经网络的原理及应用
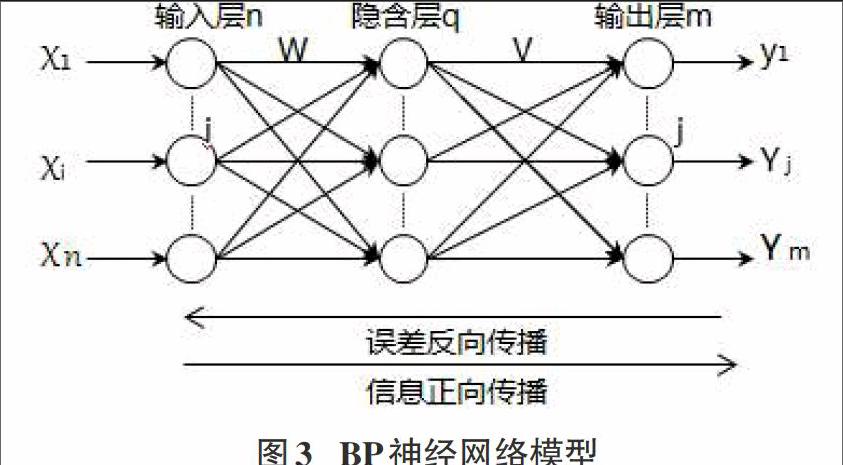
BP神经网络按误差反传播算法训练,是一种多层前馈网络【3】。其模型结构如下所示:
图3 BP神经网络模型
BP神经网络模型中含有输入、输出及其中间的隐含层,通过正向的信息传播,通过运算得到误差,再反向传播,从而更显W、V权值。BP神经网络引起反向误差传播从而得到的结果一般较为准确,往往用来分类和预测,可以通过学习训练已知的实例,从而得到新的规则,进一步将新的实例放入规则中,从而预测结果【4】。如可以基于花朵的数据集,通过学习花朵中的各个参数,从而当有新的花朵参数过来是,对其进行分类,判定其花朵的类型;或者可以通过学习电力谐波检测值,分析其信号多重频率正弦叠加分布特点,从而得到更精确、收敛更快的电力谐波检测方法【5】。
3 柔性解码方案总体流程设计
柔性解码方案主要为了解决在T-BOX与远程主机通讯过程中格式不一致的问题,但是对已配置的通讯格式进行相应处理的过程是稳定的,从而可以实现快速处理已识别协议模式、学习并识别未知协议模式的效果。
首先,将车辆在监控平台进行注册,记录其设备ID。然后通过与其建立socket网络连接,向其发送预判指令。预判指令一般为查询位置请求指令,根据已经配置和存储的协议类型分别按照对应的请求格式组装预判指令。如果能够收到设备的正确应答指令为地理位置及其速度情况时,建立对应的协议关系,记录为“已识别”状态。当请求完所有已知格式的指令而没有返回正确响应,或者返回错误的响应时,判定为该车型状态为“未识别”。以上为基础判定,如下图所示为后继的消息解析过程:
在远程监控后台,当收到车型的指令时,判断设备ID,一般为T-BOX中外围GPRS中SIM卡号。判定本地记录的状态,当为“已识别”时,根据起始符和设备ID遍历已知的解析规则,进一步解析消息头,判定其为应答式还是指令式消息,如果为应答式则进行相应的校验,识别过程结束;否则从消息头中解析需要执行的指令,回复给终端,消息处理过程结束。当本地识别状态为未识别时,根据不同的协议规则分别发送预判指令(获取定位信息)进行初步识别,当有回复定位信息时判定为正确响应则可以认定其规则,否则对指令进行BP神经网络算法进行学习和预测规则。当进行多次学习训练以后,对新规则进行预测,预测成功时生成新的规则入库。
4 BP神经网络解码应用
本文通过BP神经网络进行规则的训练,得到知识模型,从而进行预测【6】。BP神经网络需要通过历史数据的训练学习隐含的知识。本文中所述隐含的知识指代在新规则中的标识性数据,如起始符、设备ID长度、指令标志位长度及其对应携带内容模式等。应用过程为:
1)设定本文BP神经网络模型层数为2,隐含层神经元数目为5;神经元函数隐含层选择tansig函数,输出层选择pirelin函数;此外,使用自适应lr和有动量的梯度下降法进行网络训练。
2)将字符以BYTE为单位量化其消息头各个字段的其实字符偏移地址,作为训练样本输入数据。对数据进行归一化处理,归一范围[-1,1];
3)设定最大训练次数为20次,训练要求精度为75%,使用newff()构造。
4)反复训练至满足要求,并保存好训练好的神经网络。
5)输入预测数据进行预测。
下表为808协议在数据中BP神经网络模型的权重和偏置。
图5 定位信息偏移地址预测收敛速度分析
以黑色圆圈代表的预测信息和期望输出之间具有较好地契合性,得出808协议的定位信息具体内容偏移地址。
由以上训练和预测模型分别分析训练得出样本中的消息头站位长度,定位信息站位长度,从而逐步分析预测未知信息中的定位信息。由此可以得知,可以通过BP神经网络较好的分解出定位信息的结构信息,从而获取定位坐标信息。
5 总结
本文通过当前法规政策下对于车载终端T-BOX内部协议的分析和研究,以及对BP神经网络在解码、消息处理方面的应用的研究,确立了TSP中远程控制后台消息接收端的柔性解码方案。总体方案通过建立具有BP神经网络算法的指令识别流程,研究构建了可以解析多种不同格式T_BOX消息的解码器软件架构,以期可以解决当前国内T-BOX协议格式不统一的问题,为车辆网数据统一化基础性建设的研究做出重要研究。
参考文献:
[1] 陈续阳,李昆,苟洁.基于车联网技术的智能交通方法研究[J/OL].电子制作,2015(13):68.
[2] 刘毅娟,雷鸣,何旸,曹艳龙.人工神经网络概述[J/OL].电子测试,2015(11):74-75.
[3] 赵龙,人工神经网络技术及其应用的探讨[J/OL].电子技术与软件工程,2015(16).
[4] Wong W K,Yuen C W M, Fan D D,et al.Stitching de-fect detection and classification using wavelet transformand BP eural network. Expert Systems with Applica-tions:An International Journal . 2009。
[5] 付克兰,张玲.BP神经网络预测模型及应用[J/OL].电子技术与软件工程,2015(7).
[6] 王雅楠,孟晓景.基于动量BP算法的神经网络房价预测研究[J].软件导刊,2015(2).
猜你喜欢
商情(2016年43期)2016-12-23
软件导刊(2016年11期)2016-12-22
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
考试周刊(2016年21期)2016-12-16
现代经济信息(2016年27期)2016-12-16
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
