一种快速连接的变刚度关节
2015-12-05 05:54王云庆张旭龙
机械工程与自动化 2015年6期
王云庆,陈 浩,张旭龙
(北京机电工程总体设计部,北京 100854)
一种快速连接的变刚度关节
王云庆,陈 浩,张旭龙
(北京机电工程总体设计部,北京 100854)
提供了一种可变刚度的快速连接机构,它安装在预先设计好的刚性关节末端。可变刚度功能实现关节之间的柔性连接和控制,快速连接功能提高了部件间的装配效率。综合这两大功能,刚性关节改造为可快速连接的变刚度柔性关节。为了实现模块化的生产和使用,对变刚度和快速连接两大功能进行了集成设计。
关节;快速连接;变刚度
0 引言
传统的工业制造环节中,外部环境是已知的,机器人的动作依靠精确的位置控制实现,因而工业机器人各部分之间多采用刚性连接[1]。但是,当机器人末端执行器与周围环境发生接触时,再精确的位置控制也会显得不足。
对于柔性连接,一般是将弹性驱动器安装于机器人关节处,提供一种具有低输出的阻尼摩擦,进而完成精确的力控制。从20世纪80年代初起,美国麻省理工学院的Pratt教授便开始对弹性驱动器展开研究[2],后来的研究者们也提出了各种不同的方案,如:Sensinger设计了一种旋转型无回差机构[3];Sugar设计了一种并联机构[4];Sulzer基于轮绳结构对驱动器进行了设计[5];Chew用阻尼环节替换弹性环节进行设计[6]。但是,这些研究的基本原理都是一致的,都是在弹性驱动器的输出端串联上一个可以观测的弹性装置。
对于变刚度机构,国内研究多限于刚性机构的柔顺控制,而欧盟的VICTORS、SMERobot、PHRIENDS等皆在努力研制下一代能直接与人接触交往的安全性机器人。如VICTORS项目组提出的FS-Joint、VS-Joint、AWAS、VSA等变刚度的弹性机构[7-10],具有动态性能很强的可变阻抗系统。本文中的变刚度机构是基于已有的机械臂系统实验平台,设计了一种安装于两种关节模块末端的可变刚度的快速连接机构,使关节能够集成快速连接和可变刚度这两个功能。
1 快速连接变刚度关节方案设计
如图1所示,快速连接的变刚度关节主要由电机、导轨、电机固定盘、锥子圆盘、弹簧片、快速连接部件a、卡位顶锥、快速连接部件b、对接盘、联轴器、丝杠螺杆、螺母座、环形弹簧、卡位螺母等零件组成。
电机与电机固定盘、螺母座与锥子圆盘、弹簧片与锥子圆盘、快速连接部件a与快速连接部件b之间都是通过螺丝钉固定;设计的导轨将电机固定盘、锥子圆盘和快速连接部件b串接在一起,导轨通过螺纹固定在快速连接部件a上,卡位螺母将导轨固定在电机固定盘上,锥子圆盘可在导轨上往复滑动;快速连接部件a和快速连接部件b结合安装,将卡位顶锥和环形弹簧固定在快速连接部件a的圆孔槽中;接盘的设计能够实现对快速连接部件的引导以及对弹簧片插入弹簧片卡槽的引导。
2 机构的运动过程
2.1 机构快速连接过程
图2为机构的快速连接过程。
如图2(a)所示,快速连接之前,卡位顶锥完全位于快速连接部件a内部,环形弹簧为无形变自然状态。如图2(b)所示,快速连接过程中,电机驱使锥子圆盘向远离电机固定盘的方向运动,锥子圆盘上的大锥子逐渐将卡位顶锥顶出,顶出距离小于或等于斜引导槽的厚度,此时电机停机,对接盘向上套接在快速连接部件的外侧,卡位顶锥外端的顶出部分经斜引导槽引导后在竖引导槽内向下运动,当卡位顶锥运动到竖引导槽内时,弹簧片进入对接盘的弹簧片卡槽。如图2(c)所示,当卡位顶锥运动到对接盘上卡位槽的对应位置时,启动电机,锥子圆盘继续向下运动,大锥子的圆锥面继续将卡位顶锥顶出,直到卡位顶锥的顶出距离大于竖引导槽的厚度,电机停机,完成整个快速连接。

图2 机构的快速连接过程
2.2 机构快速分离过程
当需要分离两个部分时,电机反向运动,带动锥子圆盘向电机固定盘的方向运动,此时卡位顶锥在环形弹簧的作用下复位,卡位顶锥逐渐离开卡位槽,此时对接盘和快速连接部件b可以分离,从而解除连接。
2.3 机构变刚度过程
电机得到相应的信号,驱动锥子圆盘往复运动,从而改变弹簧片与弹簧片卡槽的相对位置,达到变刚度的目的。锥子圆盘往复运动的过程中需保证卡位顶锥一直位于卡位槽内且弹簧片一直位于弹簧片卡槽内。3 计算验证
通过改变弹簧片与弹簧片卡槽的相对位置实现可变刚度功能。由材料力学公式可得弹簧片挠度w的表达式为:
(1)
其中:a为弹簧片的宽度;b为弹簧片的厚度;c为弹簧片的初态可变长度;F为每个弹簧片的受力;E为弹簧片的弹性模量;x为弹簧片相对弹簧片卡槽的移动距离。
弹簧片的转动角度α为:

(2)
其中:d为弹簧片中心绕轴心的旋转半径。
定义广义刚度K为:

(3)
其中:M为两个连接模块间的扭矩。
将式(2)中的转动角度α代入式(3)得:
(4)
根据推导出的变刚度公式(4),设定11个x取值点,可得刚度值变化曲线,如图3所示。
4 仿真分析
4.1 应力分析
弹簧片是可变刚度关节的核心零件,其在与关节所连接的两模块间发生相对扭转时会承受应力与应变。设计的弹簧片尺寸参数为:a=20 mm,b=3 mm,变刚度阶段最大实际有效长度为20 mm。应用SolidWorks Simulation软件建立弹簧片三维模型材料选择65弹簧钢,夹具选择在弹簧片与圆锥盘的安装面,载荷选择278 N,作用点在距离弹簧片安装面20 mm处。
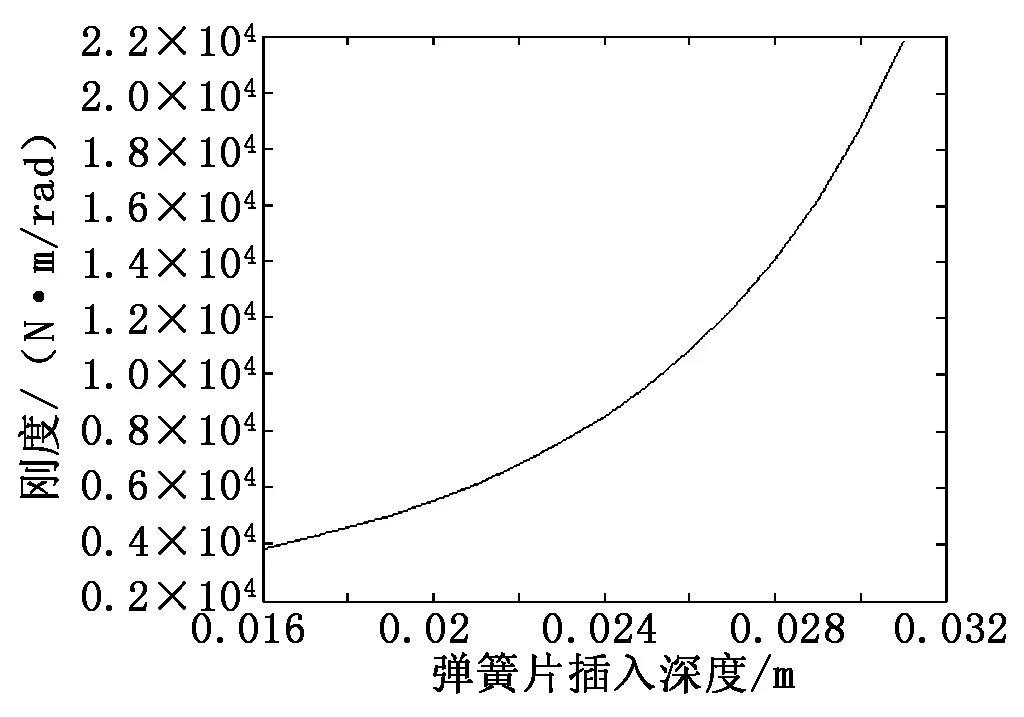
图3 刚度变化曲线图
弹簧片的应力分析结果如图4所示。最大应力为250.234 MPa,而材料的屈服力为620.422 MPa,因此强度满足设计要求。

图4 弹簧片应力云图
弹簧片的应变分析结果如图5所示。力作用点的挠度在0.515 mm~0.617 mm之间,由于需要保证关节模块相对旋转±5°以内,即实际挠度应小于设计的最大挠度,设计的最大挠度w约为3.925 mm。因此仿真的应变结果满足设计要求。

图5 弹簧片应变云图
4.2 动力学仿真
将设计好的三维模型导入ADAMS,设定相应的配置参数,并添加相应的运动副和所需的驱动,如图6所示。
运动学仿真过程中,采用STEP函数,其使用格式为:STEP(x, x0, h0, x1, h1)。其中x为自变量,x0为自变量的STEP函数开始值,x1为自变量的STEP函数结束值,h0为STEP函数的初始值,h1为STEP函数的最终值。在STEP函数的驱动下,模型的运动如图7所示。Step 1为初始姿态;Step 2为快速连接前将卡位顶锥顶出用于引导;Step 3为变刚度弹簧片与卡槽对准;Step 4为快速连接过程开始;Step 5为快速连接过程完成;Step 6为刚度调节过程。
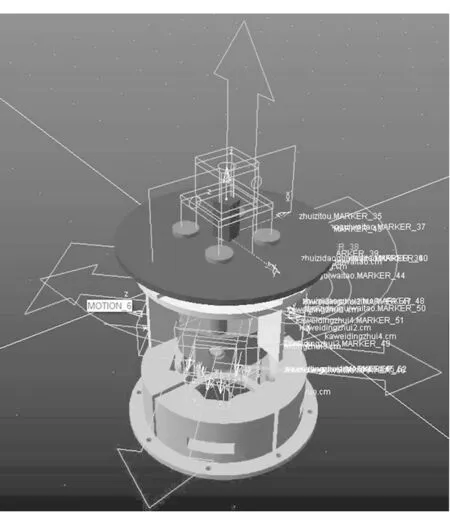
图6 添加运动副和驱动的模型

图7 模型仿真运动
本文利用SolidWorks Simulation和ADAMS软件对机构进行应力、应变和运动学仿真,验证了机构设计的正确性与可行性。
5 结论
变刚度柔性关节是目前的研究热点,我们将快速连接机构与变刚度机构融合到了同一模块。在完成机构模块三维模型设计的基础上,推导了机构变刚度的调节规律,进行了材料力学的计算验证,并在SolidWorks
Simulation平台上对关键部件进行了应力、应变仿真,在ADAMS平台上进行了动力学仿真,验证了方案的可行性和正确性。
[1] 马洪文,尹博,王立权,等.双刚度弹性驱动器力学特性频域分析[J].中国机械工程,20(9):1078-1082.
[2] Pratt G, Williamson M. Series elastic actuators[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems.[s.l.]:IEEE, 1995:1655-1660.
[3] Sensinger J W, Weir R. Unconstrained impedance control using a compact series elastic actuator[C]// Proceedings of the 2nd IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications. [s.l.]:IEEE,2006:1-6.
[4] Ronald Van Ham, Thomas G Sugar, Bram Vanderborght, et al. Compliant actuator designs[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2009:229-238.
[5] Sulzer,James S. An exotendon-driven rotary series elastic actuator for exerting joint torque[C]// Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics.[s.l.]:IEEE,2005:103-108.
[6] Chew Chee-menq, Honq Geok-soon. Design of series damper actuator[J]. Robotica, 2009,27(3):379-387.
[7] Sebastian Wolf, Oliver Eiberger, Gerd Hirzinger. The DLR FSJ: Energy based design of a variable stiffness joint[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2011:865-875.
[8] Manuel G Catalano, Giorgio Grioli, Manolo Garabio Bonomo, et al. VSA-CubeBot: a modular variable stiffness platform for multiple degrees of freedom robots[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2011:103-108.
[9] Amir Jafari, Nikos G Tsagarakis, Darwin G Caldwell. AwAS-Ⅱ: A new actuator with adjustable stiffness based on the novel principle of adaptable pivot point and variable lever ratio[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2011:462-467.
[10]Michele Mancini, Giorgio Grioli, Manuel G Catalano, et al. Passive impedance control of a multi-DOF VSA-CubeBot manipulator[C]// IEEE Proc of Int Conf, On Robotics and Automation.[s.l.]:IEEE, 2012:382-394.
A New Rapid Connection Joint with Variable Stiffness
WANG Yun-qing, CHEN Hao, ZHANG Xu-long
(Beijing Central Department of Mechanical and Electrical Engineering Design, Beijing 100854, China)
This paper provides a rapid connection mechanism wiht variable stiffness, which is installed at the end of the designed rigid joint. Variable stiffness is used to realize flexible connection and control among joints, and rapid connection is used to increase parts assembly’s efficiency. Combination of these two functions makes the rigid joint become flexible joint. At the same time, the two functions of variable stiffness and rapid connection are integrated together to realize modularized production and use.
joint; rapid connection; variable stiffness
1672- 6413(2015)06- 0091- 03
2015- 03- 23;
2015- 09- 25
王云庆(1990-),男,四川成都人,助理工程师,硕士,从事机器人机械臂的研究工作。
TP242
A
国家863计划(2012AA041402)
猜你喜欢
民间故事选刊·上(2022年1期)2022-02-09
民用飞机设计与研究(2021年3期)2021-10-19
上海故事(2021年1期)2021-03-18
金属加工(热加工)(2020年2期)2020-02-23
汽车零部件(2019年12期)2020-01-16
智能制造(2019年4期)2019-06-20
柴油机设计与制造(2018年3期)2018-10-13
传媒评论(2018年3期)2018-06-21
NBA特刊(2018年7期)2018-06-08
NBA特刊(2017年8期)2017-06-05