集合均方根滤波同化地面自动站资料的技术研究
2015-12-05 07:49:12邵长亮闵锦忠
大气科学 2015年1期
邵长亮 闵锦忠
集合均方根滤波同化地面自动站资料的技术研究
邵长亮1, 2, 3闵锦忠1, 3
1南京信息工程大学气象灾害预报预警与评估协同创新中心,南京210044;2中国气象局气象探测中心,北京100081;3气象灾害教育部重点实验室,南京210044
模式地形与观测站地形高度差异一直是地面资料同化面临的棘手问题,合理的同化方案能够将地面自动站资料有效的同化到中尺度数值模式中。本文首先采用Guo et al.(2002)的方案实现了在WRF模式中应用集合Kalman滤波方法同化地面自动站资料;然后对方案进行调整,对10 m高度风场、2 m高度位温、2 m高度露点和地表气压进行同化。通过均方根误差分析,模拟结果和同化增量分析来确定集合平方根滤波(EnSRF)同化地面自动站资料的有效性,并进行敏感性试验分析检验模式对各要素物理量的响应状况。结果表明:在EnSRF同化系统中应用Guo et al.(2002)的方案将地面自动站资料进行同化到数值模式中,能够部分改善模拟结果;地面观测资料(温度、湿度、风场、地表气压)中各物理量分别同化到数值模式都能影响18小时降水预报,但各物理量所起作用大小不同,其中对结果影响最大的是露点;使用位温、露点分别代替温度、比湿进行同化模拟效果更好,对自动站资料的同化也更加有效。
资料同化 集合Kalman滤波 自动站资料 敏感性试验
1 引言
中尺度对流天气如暴雨、冰雹、龙卷等往往会造成比较严重的自然灾害, 给人们的生命财产带来重大损失。而我国又是一个暴雨频发的国家, 因此对中尺度天气系统的预报就显得尤为重要。当前主要通过数值预报模式来实现对中尺度天气的预报,而要得到准确的数值天气预报,需要具备两个条件:一个是准确的初值, 另一个是准确的大气运动规律。随着模式的不断发展完善,对初始条件的精确性要求也日趋提高,因而资料同化的作用也愈发凸显。
资料同化发展至今经历了从属于三维同化的多项式拟合、逐步订正、最优插值(OI)、三维变分(3DVAR)同化到属于四维同化的四维变分(4DVAR)和集合卡尔曼滤波(EnKF)几个不同的阶段。3DVAR因其能够直接同化非常规资料的优势,已经取代OI成为当前主流的同化方法,在国内外主要的中尺度数值预报模式平台上都已构建了相应的3DVAR同化系统(Gao et al., 2001;Barker et al., 2004;薛纪善等,2008)。尽管取得了较好的效果,但因为3DVAR同化方法本身所具有的局限性,所以为了给数值模式提供更好的初始场,人们已将当前研究的重心转向了四维同化,其中4DVAR和EnKF是当前主流的四维同化方法。在主要的中尺度模式上, 包括雷达和卫星等非常规资料在内的4DVAR同化得到了一定的研究(De Pondeca and Zou,2001;Martinelli et al., 2003;Huang et al., 2009),此外,为了回避4DVAR需要复杂伴随模式的问题,一种显式的4DVAR(Qiu and Chou,2006)方法在近几年也得到了一定的研究。EnKF作为与4DVAR并列的未来可能替换已有业务3DVAR同化系统的一种选择, 从1994年Evensen(1994)提出至今, 已经得到了广泛的研究,对包括EnKF在风暴尺度领域应用的可行性, 同化参数的设置等方面在内的许多问题有了一定的研究(Järvinen et al., 1999;Thompson et al., 2003;Hacker and Snyder,2005)。相比于4DVAR同化方法,EnKF并不需要复杂的伴随模式,而且可以和模式相互独立,易于构建和维护。同时,EnKF所使用的背景误差协方差随模式预报而变化,具有流依赖的性质,这使得EnKF相对于3DVAR具有明显的优势。但正如所有的方法都会有自身的缺点一样,EnKF也存在一些尚待解决的问题,其中有限集合数是集合资料同化存在的本质性问题。目前的解决方法多为采用误差协方差的局地化和误差协方差膨胀。
同时,随着计算机计算能力及数值计算水平不断提高,数值模式的分辨率越来越高,数值预报和模拟研究有较大程度的提高。中尺度数值模式空间分辨率的提高使得常规探空(高空温、压、湿、风场)资料已经越来越不能满足其需要。因为300 km间距或以上探空网站的探测点稀疏,用于客观分析的常规观测资料密度不够,使物理量场分析往往过于平滑,不能提供有足够精度的水平物理量梯度,从而导致了辐散场、非绝热加热和湿度场之间的初始场缺少一致性,因而在资料客观分析中往往丧失掉一些很重要的中尺度特征。因此若仅用常规探空资料,则可能漏掉一些中小尺度系统。Zhang and Fritcsh(1986)认为若在中尺度数值模式的初始场中同化进更多的中尺度信息,则能够在一定程度上克服上述缺陷。为了适应中尺度、短时效的精细天气预报的需求,现代化的观测手段是获取能描述中尺度、短时天气现象的观测资料所必不可少的。除卫星遥感、飞机观测外,地面自动站(AWS)观测资料也是重要资料源之一。目前,世界上许多地区或国家都建立了分布密集的AWS观测网(Shafer et al., 2000;Vejen et al., 2002)。2006 年初,全国共有5000多个地面自动站。一些地区自动站间的间距已小于10 km,地面观测的空间覆盖率远大于探空,而且自动气象站还提供1小时一次基本要素观测,观测频率非常之高,蕴含着丰富的中尺度信息。我国的AWS观测网正在受到高度重视和日趋完善,许多省市都有AWS观测网。至今全国有约3万个AWS。AWS观测资料具有站点分布密集、地形差异大、测站环境恶劣、数据采集和传输自动化程度高、资料实时性强、中小尺度天气现象明显等特点(陶士伟等,2009)。
在EnKF同化地面自动站资料领域,Järvinen et al.(1999)指出在四维同化方案中同化地面观测可以提高预报的准确性。但是,模式地形与实际地形高度不一致所带来的问题是不可否认的。Hacker and Snyder(2005)阐明地面观测富含的信息应该被更有效地应用在完美模式的资料同化中。Zhang and Fritcsh(1986)指出单独同化地面观测可以减小冬季对美国东海岸气旋爆发的预报误差。Stensrud et al.(2009)针对一次冷池过程,在WRF-DART系统中使用EnKF方法直接同化地面观测,并指出,EnKF不仅可以反映实际的地面状况,而且可以反映边界层以及边界层以上,由这些观测到的地表特征所反映的垂直运动和垂直结构。这些研究说明应用EnKF同化地面资料对改进边界层预报是个富有成效的方法。
由于地面观测资料受地形、地貌的影响较大, 且一般模式地形与实际观测站地形存在一定的高度差异,因此将地面观测资料应用到数值模式中的研究工作相对雷达卫星等其他非常规资料的同化工作少许多(Miller and Benjamin,1992;Ruggiero et al., 1996;Urban,1996),进展也不大。Guo et al.(2002)设计的方案没有考虑实际观测站地形与模式地形高度的差异,而是假定所有测站的资料(除地面气压)都是位于模式面,然后利用相似理论建立10 m高度风场(10,10)和2 m高度温度(2)、湿度(2)的观测算子及相应的切线和伴随模式,同时在进行极小化运算前将地面气压(sfc) 折算到模式最低层。实现该方案采用的同化分析模式是MM5-3DVAR。此方案充分利用了观测资料,但却没有考虑模式地形与实际测站地形的高度差异,对于地形分布复杂,模式地形与观测站地形高度差异较大的区域,由于温度、气压、风场等观测资料是随着海拔高度和地形分布而变化的,差异较大就会造成模式中各物理量梯度不协调。Fujita et al.(2006)在MM5模式中应用EnKF方法,同化风场(,)、位温()和露点(d),地表气压()只用来计算位温(),而不进行同化,从而降低高度差异带来的影响,但这样做对气压场信息的利用并不充分,同时在一定程度上造成气压场与风场、温度场和湿度场不匹配。徐枝芳等(2007a,2007b)认为我国的地形比较复杂,模式地形与实际观测站地形在许多地区存在较大差异,地面观测资料同化方案设计中有必要考虑模式与实际观测站地形高度差异,她基于 MM5_3DVAR系统对Guo et al. (2002)采用的方法提出了改进:在地面观测误差中增加由于模式地形与观测站地形高度差异引起的地形代表性误差。这个同化方案有效合理地将地面资料同化到了数值模式中,改进了暴雨模拟结果,但是增加地形代表性误差会导致地面观测误差不满足无偏假定,分析场也不能达到最优。Stensrud et al.(2009)在WRF-DART系统中使用EnKF方法直接同化10 m高度风场(10,10)和2 m高度位温(2)、露点(d2),没有同化地表气压(sfc),但是同样没有考虑高度差异。
本文在WRF模式中应用EnKF方法同化自动站资料,针对我国的复杂地形和地面自动站的特点,以一次暴雨个例作为研究对象,对同化方案进行研究。首先采用Guo et al.(2002)的方案实现对自动站资料的同化并检验其在EnKF中表现;然后对其进行调整,使用位温和露点代替温度和比湿进行同化形成新的同化方案,并检验新方案的同化效果。
2 试验方案设计
2.1 集合均方根滤波(EnSRF)方法介绍
本文应用比较成熟的WRF模式,应用集合平方根滤波方法。EnSRF较之基于Monte Carlo思想的传统EnKF能够避免由于扰动观测带来的采样误差而导致的低估分析误差协方差的问题(Whitaker and Hamill,2002),由于对观测进行扰动会引入额外的采样误差,导致分析误差协方 差被低估,而如果不对观测进行扰动,原分析误 差协方差就会变为,同样会低估分析误差协方差,其中,卡尔曼增益,为背景误差协方差,经典EnKF中观测误差协方差矩阵,为观测算子,其作用是将模式变量转变为观测变量。为了解决这个矛盾,在EnSRF方法中引入了一个小参数,令,使得能够满足原EnKF中分析误差协方差的公式。在单一观测条件下的解:(Whitaker and Hamill,2002),因此,EnSRF的更新方程变为:,,其中代表集合的扰动,代表集合平均,代表观测。该方法并不需要对观测进行扰动,更新过程中,对于集合平均采用经典集合Kalman滤波的更新方程,而集合成员则采用所谓的“减”增益的更新方法。观测采用顺序同化方法,对观测逐个分析,因而不涉及到矩阵转置计算的问题,同时EnSRF方法避免了观测采样误差的引入,相对于对观测加扰动的“随机”方法,这种方法也称为“确定性”的集合Kalman滤波方法。较之同属于确定性方法的EAKF,EnSRF方法在计算量上有着较大的优势(Tippett et al., 2003)。
2.2 自动站资料同化方案
本文所使用的自动站要素为10 m风场(10,10)、2 m温度(2)、2 m相对湿度(2)和地表气压(sfc)。设计两种同化方案,方案一即为Guo et al.(2002)方案,方案二为对Guo et al.(2002)调整后的新方案。方案一同化的观测类型为:10 m高度风场(10,10)、2 m高度温度(2)、2 m高度比湿(2)和地表气压(sfc)。方案二同化的观测类型为10 m高度风场(10,10)、2 m高度位温(2)、2 m高度露点(d2)和地表气压(sfc)。新方案的调整主要有两部分内容:(1)用位温()代替温度()进行同化。在白天,位温在充分混合的边界层,垂直分布较简单,有利于减少内插造成的误差。(2)用露点温度(d)代替混合比()。试验表明,当较小时,分析阶段对的更新会造成湿度变量产生较大的虚假增量。这很可能是由于当发生微小变化时,发生迅速变化,导致较强的非高斯误差分布。相反露点温度变化更为平滑。
剔除-大于5倍观测误差的观测资料,作为对自动站资料的质量控制。其中代表观测值,代表背景场值。
方案一,对10 m高度风场(10,10)、2 m高度温度(2)、2 m高度比湿(2)的同化,观测算子包含两部分,由垂直外推和水平差值组成。(1)垂直外推以Monin-Obukhov相似理论为基础,由最低半σ层预报变量得到2、2、10、10。(2)水平差值应用线性内插法得到相应变量在观测位置上的值。其中,垂直外推在WRF内部完成并与地表物理过程参数化方案一致。
方案二,对10 m高度风场(10,10)、2 m高度位温(2)、2 m高度露点(d2)的同化,观测算子包含三部分,由垂直外推、变量变换和水平差值组成。(1)垂直外推以Monin-Obukhov相似理论为基础,由最低半σ层预报变量得到2、2、10、10。(2)变量变换将2、2变换为2、d2。(3)水平差值应用线性内插法得到相应变量在观测位置上的值。其中,垂直外推在WRF内部完成并与地表物理过程参数化方案一致,变量变换中由2到2的变换在WRF内部完成。d2由2、2、sfc计算得到。
方案一和方案二对地表气压(sfc)的同化一致,模式中的sfc由WRF中直接得到,应用静力平衡方程将sfc由模式地形高度订正到实际测站地形高度。同化方案对比见表1。

表1 同化方案对比
2.3 暴雨过程
2005年9月18~21日, 副热带高压边缘暖湿气流和北方冷空气在山东交汇,山东出现了历史上罕见的秋季连续暴雨过程。特别是18日夜间出现了以济南为中心的东西向暴雨带,18小时[9月18日12时至19日06时(协调世界时,下同)] 降水实况如图1所示。由于这次暴雨过程没有出现明显的强辐合系统(低涡、锋面、气旋、切变线等)等典型的暴雨形势特征,属突发区域性暴雨,预报难度较大,于是本文选这次暴雨过程作为研究个例。
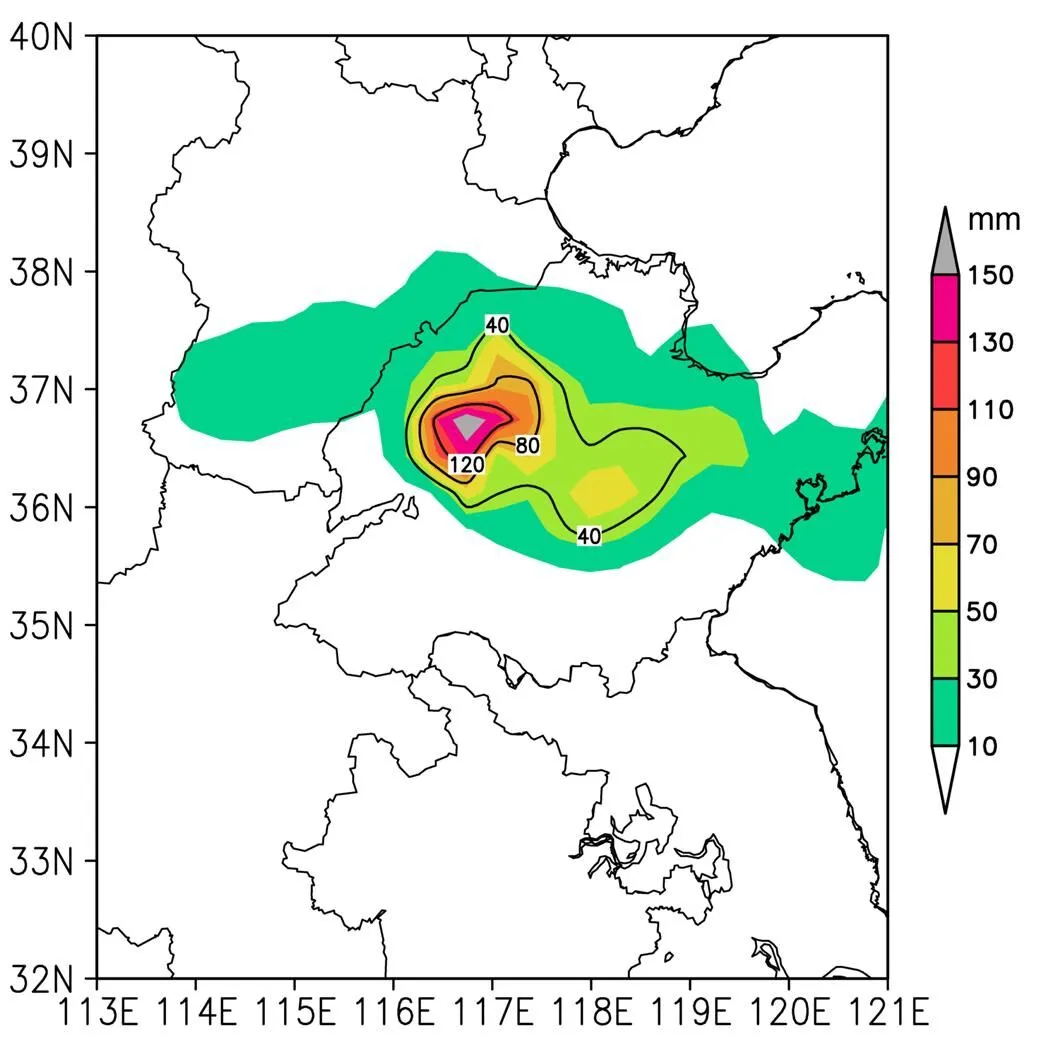
图1 2005年9月18日12时至19日06时18小时降水观测(单位:mm)
2.4 试验设计
本文采用WRF模式单重区域,水平格局10 km,试验区中心点取为(37°N,117.5°E),格点数取为200×180,垂直方向共有31层。全部试验的物理过程均选取了Ferrier(new Eta)对流参数化过程,MRF边界层参数化方案,Kain-Fritsch(new Eta)微物理过程参数化方案。模式起始时间为2005年9月18日06时,积分24小时。基本试验资料为2005年9月18日06时至19日06时每6小时一次的NCEP1°×1° FNL背景场资料和18日09时至18日12时逐时的山东省地面自动站资料。

图2 2005年9月18日09时自动站观测分布情况(a)和自动站实际地形高度与模式地形高度差(单位:m)(b)
同化方法为EnSRF。集合数40,生成初始集合时,全场加均值为零的随机扰动,的扰动标准差分别为2 m/s、2 m/s、1 m/s,的扰动标准差为2 K,Q的扰动标准差为0.0005 kg/kg(此处Q为背景场要素值)。协方差膨胀使用松弛膨胀法,将预报集合扰动与分析集合扰动按一定比例相加Zhang et al.(2004),背景场系数为0.7,分析场系数为0.3;局地化使用的相关函数为Gaspari and Cohn(1999)方案,使用Schur算子。水平和垂直局地化距离分别为40 km和10 km;方案一中,(10,10)、2、2、sfc观测误差分别为22、d2、sfc观测误差分别为2 m/s、2 K、2 K、1 hPa。模式起始时间为18日06时,08时加入扰动,09时开始同化第一次自动站资料,共同化四个时次到m/s、2 K、1 g/kg、1 hPa;方案二中,(10,10)、18日12时,然后开始预报至19日06时结束。图2为9月18日09时自动站观测分布情况和自动站实际地形高度与模式地形高度差。
为检验数值预报模式对单要素物理量的响应情况,比较不同要素物理量对模式初始场的改进作用,以及比较同化单要素物理量和同化全要素物理量对数值预报模式结果的改善状况。本文设计了一组试验对仅同化单要素物理量做一探讨研究,为进一步深入地开展地面资料同化研究工作奠定基础。具体设计(见表2)为:试验1为控制试验,不做同化;试验2~7分别同化风场、温度、比湿、位温、露点和气压;试验8为使用方案一同化所有物理量(10,10,2,2,sfc);试验9为使用方案二同化所有物理量(10,10,2,d2,sfc)。

表2 试验方案设计
3 EnSRF资料同化结果分析
3.1 敏感性试验结果分析
图3为同化各要素改进模式初始场后积分18小时的降水模拟结果。试验1(控制试验)存在三个强降水中心,与实况不符,并且降水强度均偏小。与试验1对比,试验2~9中,除试验3(同化温度)出现两个强降水中心外,其他各试验均只有一个强降水中心,其中试验6(同化露点)模拟出了120 mm的暴雨中心,其强度与实况较为接近。试验9(方案二同化所有物理量)与试验6相比,暴雨中心范围有所扩大,更加接近实况;与试验8(方案一同化所有物理量)相比,暴雨中心范围与降水强度均更加接近实况。从以上分析可以看出,模式对同化各要素物理量均有响应,但是敏感程度各不相同。模式对露点最为敏感,对风场、位温和气压的敏感程度相似,与露点比相对较弱。综合同化所有物理量对改善数值预报效果略好一些,且方案二好于方案一。

图3 2005年9月18日12时至19日06时18小时降水:(a)实况;(b)试验1;(c)试验2;(d)试验3;(e)试验4;(f)试验5;(g)试验6;(h)试验7;(i)试验8;(j)试验9
3.2 均方根误差分析
为了定量分析EnSRF的同化效果,计算了各时次EnSRF分析前后背景场与所同化的地面自动站要素之间的均方根误差(RMSE)。图4给出了使用方案一同化地面自动站资料(10,10,2,2,sfc)和使用方案二同化地面自动站资料(10,10,2,d2,sfc)过程中,10 m风场(10)、10 m风场(10)、2 m温度(2)、2 m比湿(2)、2 m位温(2)、2 m露点(d2)和地表气压(sfc)的RMSE随时刻的变化。
由图4可以看出,方案一对2的同化,分析后的RMSE比预报结果的RMSE要大,这种负效果可能是由于2的剧烈变化产生的较强非高斯误差分布(Fujita et al., 2006)导致的;而方案二,在同化过程中使用d2代替2,能较好的改进对湿度观测的同化。除方案一中的2外,每次分析结果的RMSE都比预报结果的RMSE小,这表明每次同化地面自动站资料后的结果都比同化前更接近实际观测,体现了EnSRF同化的有效性。同时,RMSE_2与RMSE_2相比,值相对较小,下降趋势更明显,说明使用2代替2能够使结果更接近实际观测。方案二中的RMSE_10和RMSE_10比方案一中的要小,说明使用方案二比使用方案一对风场资料的同化更有效。方案一与方案二的RMSE_sfc差别较小,说明对气压场的同化效果差别不大。在方案二中,RMSE_10和RMSE_10随着时间的增加变化不明显,09时预报的RMSE分别为1.17 m/s和1.32 m/s,12时分析后分别为0.95 m/s和0.99 m/s;RMSE_2、RMSE_d2和RMSE_sfc随着时间的增加迅速减小,09时预报的RMSE分别为1.846434 K、3.04816 K和1.142898 hPa, 12时分析后分别为0.970432 K、1.32523 K和0.317531 hPa。
3.3 观测有效利用情况
在EnSRF系统同化地面自动站资料时,做了简单的质量控制,当观测值与模式值之间的差值大于5倍观测误差的时候,剔除该观测资料,不参与同化分析。图5分别为为方案一和方案二观测参与同化分析的情况。
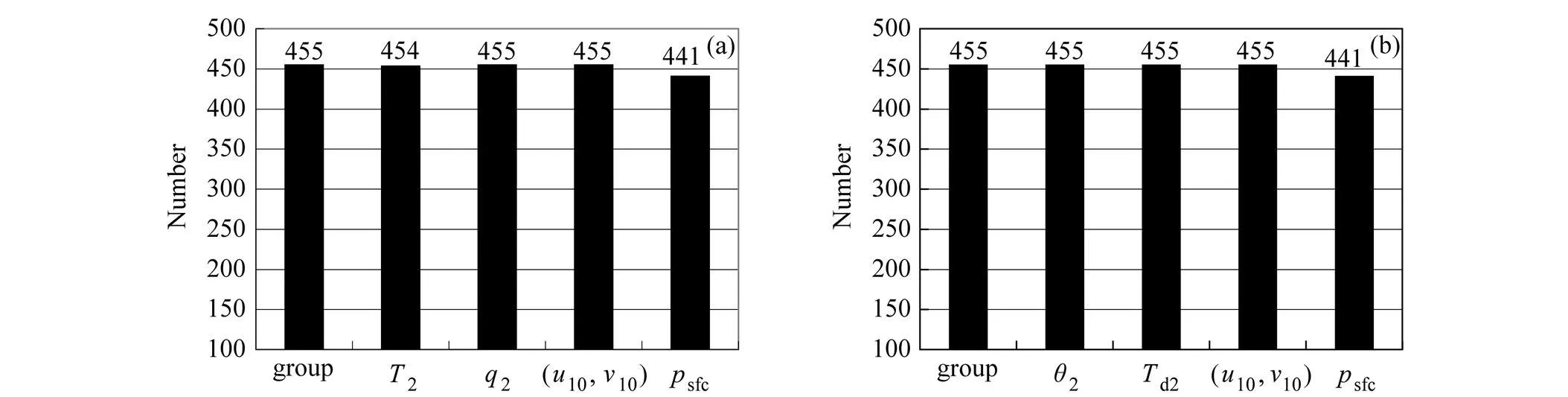
图5 观测参与同化分析的情况:(a)方案一;(b)方案二
在4个时次的自动站资料中,共包含455组(group)资料,方案一同化过程中,比湿(2)、风场(10,10)观测全部参与了同化分析,参与同化分析的温度(2)观测有454个,气压(sfc)观测有441个。方案二同化过程中位温(2)、露点(d2)、风场(10,10)观测全部参与了同化分析,气压(sfc)观测有441个参与了同化分析。
3.4 同化增量分析
同化增量为同化分析结果减去背景场之差。图6、图7、图8分别为模式第二层()关于风场的散度场增量、温度场增量和湿度场增量。从散度场增量图上可以看出,试验8山东北部地区及山东中部及偏西南地区为辐合区,试验9较试验8在(35°N,116.5°E)附近辐合中心较强。在温度场增量图上,试验8在山东中北部地区为增温区,试验9较试验8增温中心位置偏西,且增温中心强度偏大。在湿度场增量图上,试验8山东中北部地区为增湿区,在山东西北部、南部及西南部为减湿 区,试验9较试验8增湿区位置偏南,且增湿幅度偏大,西北部减湿区减湿幅度偏小。由同化单要素物理量的敏感性试验结论可知湿度场对初始场的影响作用最大,因此试验8和试验9降水区偏东北的主要原因可能是初始场中增湿区偏东北。

图6 模式第二层水平散度场增量(单位:10−5 s−1):(a)试验8;(b)试验9

图7 模式第二层温度场增量(单位:K):(a)试验8;(b)试验9

图8 模式第二层湿度场增量(单位:g/kg):(a)试验8;(b)试验9
4 总结与讨论
本文将Guo et al.(2002)的方案应用在EnSRF系统中,并对其进行了调整形成了新方案,针对一次暴雨过程进行了自动站资料同化分析研究。结果表明:地面观测资料(温度、湿度、风场、地面气压)中各物理量分别同化到数值模式都能影响18小时降水预报,但各物理量所起作用大小不同,使用位温代替温度参与同化以及使用露点代替比湿进行同化都能改数值结果,其中对结果影响最大的是露点;在EnSRF同化系统中应用Guo et al.(2002)的方案将地面自动站资料进行同化到数值模式中,能够部分改善模拟结果;新方案较Guo et al.(2002)的方案10 m风场的均方根误差更小,说明对地面温度、湿度资料同化分析过程中除影响自身的分析场,同时还影响风场的分析;新方案对温度资料的利用也更加充分。总的来说,新方案较Guo et al.(2002)的方案的模拟结果更加接近实况,对自动站资料的同化也更加有效。
本文使用了风、温度、湿度与气压数据进行同化研究,并分析了各类数据的贡献,新方案对促进地面自动站观测在数值预报中的应用有一定意义。EnSRF方法及新方案对于同化地面资料有较好的应用前景,也为充分合理地利用中尺度信息、解决中尺度问题提供了参考和建议。
本文虽然取得了一定的成果,但是仍存在不足。在我国地形复杂,模式地形与实际测站地形在一些地区存在较大差异的背景下,除对气压的同化之外,Guo et al.(2002)的方案和本文中的新方案均没有考虑这种差异,需更深入的研究。
致谢 感谢两位匿名审稿专家及编委对本文提出的宝贵意见。
(References:)
Barker D M, Huang W, Guo Y R, et al. 2004. A Three Dimensional Variational (3DVAR) data assimilation system for use with MM5: Implementation and initial results [J]. Mon. Wea. Rev., 132 (4): 897–914.
De Pondeca M S F V, Zou X L. 2001. A case study of the variational assimilation of GPS zenith delay observations into a mesoscale model [J]. J. Appl. Meteor., 40 (9): 1559–1576.
Evensen G. 1994. Sequential data assimilation with a non-linear quasi-geostrophic model using Monte Carlo methods to forecast error statistics [J]. J. Geophys. Res., 99 (C5): 10143–10162.
Fujita T, Stensrud D J, Dowell D C. 2006. Surface data assimilation using an ensemble Kalman filter approach with initial condition and model physics uncertainties [J]. Mon. Wea. Rev., 135 (5): 1846–1868.
Gao J, Xue M, Brewster K, et al. 2001. A 3DVAR data assimilation scheme for storm-scale model [C]. 14th Conference on NWP, AMS, J: 72–74.
Guo Y R, Shin D H, Lee J H, et al. 2002. Application of the MM5 3DVAR system for a heavy rain case over the Korean Peninsula [C]// Papers Presented at the Twelfth PSU/NCAR Mesoscale Model Users’ Workshop NCAR, June 24–25, 2002.
Hacker J P, Snyder C. 2005. Ensemble Kalman filter assimilation of fixed screen-height observations in a parameterized PBL [J]. Mon. Wea. Rev., 133 (11): 3260–3275.
Huang X Y, Xiao Q, Barker D M, et al. 2009. Four-dimensional variational data assimilation for WRF: Formulation and preliminary results [J]. Mon. Wea. Rev., 137 (1): 299–314.
Järvinen H, Andersson E, Bouttier F. 1999. Variational assimilation of time sequences of surface observations with serially correlated errors [J]. Tellus, 51 (4): 469–488.
Martinelli J T, Pasken R W, Lin Y J, et al. 2003. A high resolution numerical simulation of a linear mesoscale convective system utilizing the MM5 4DVar system and single WSR-88D data [C]. 31st International Conference on Radar Meteorology American Meteorology Society, P1C. 3, Abstract and paper.
Miller P A, Benjamin S G. 1992. A system for the hourly assimilation of surface observations in mountainous and flat terrain [J]. Mon. Wea. Rev., 120 (10): 2342–2359.
Qiu C J, Chou J F. 2006. Four-dimensional data assimilation method based on SVD: Theoretical aspect [J]. Theor. Appl. Climatol., 83 (1–4): 51–57.
Ruggiero F H, Sashegyi K D, Madala R V, et al. 1996. The use of surface observations in four dimensional data assimilation using a mesoscale model [J]. Mon. Wea. Rev., 124 (5): 1018–1033.
Shafer M A, Fiebrich C A, Arent D S, et al. 2000. Quality assurance procedures in the Oklahoma Mseonet-work [J]. J. Atmos. Oceanic Techenol., 17 (4): 474–494.
Stensrud D J, Yussouf N, Dowell D C, et al. 2009. Assimilating surface data into a mesoscale model ensemble: Cold pool analyses from spring 2007 [J]. Atmospheric Research, 93 (1–3): 207–220.
陶士伟, 仲跻芹, 徐枝芳, 等. 2009. 地面自动站资料控制方案及应用 [J]. 高原气象, 28 (5): 1202–1210. Tao Shiwei, Zhong Qiqin, Xu Zhifang, et al. 2009. Quality control schemes and its application to automatic surface weather observation system [J]. Plateau Meteorology (in Chinese), 28 (5): 1202-1210.
Thompson R L, Edwards R, Hart J A, et al. 2003. Close proximity soundings within supercell environments obtained from the rapid update cycle [J]. Wea. Forecasting,18: 1243–1261.
Tippett M K, Anderson J L, Bishop C H, et al. 2003. Ensemble square-root filters [J]. Mon. Wea. Rev., 131: 1485–1490.
Urban B. 1996. Coherent observation operators for surface data assimilation with application to snow depth [J]. J. Appl. Meteor., 35 (2): 258–270.
Vejen F, Jacobsson C, Fredriksson U, et al. 2002. Quality control of meteorological observations automatic methods used in the Nordic countries [R]. Climate Report, No. 8, KLIMA.
Whitaker J S, Hamill T M. 2002. Ensemble data assimilation without perturbed observations [J]. Mon. Wea. Rev., 130 (7): 1913–1924.
徐枝芳, 龚建东, 王建捷, 等. 2007a. 复杂地形下地面观测资料同化Ⅰ. 模式地形与观测站地形高度差异对地面资料同化的影响研究 [J]. 大气科学, 31 (2): 222–232. Xu Zhifang, Gong Jiandong, Wang Jianjie, et al. 2007a. A study of assimilation of surface observational data in complex terrain. Part Ⅰ: Influence of the elevation difference between model surface and observation site [J]. Chinese J. Atmos. Sci. (in Chinese), 31 (2): 222-232.
徐枝芳, 龚建东, 王建捷, 等. 2007b. 复杂地形下地面观测资料同化Ⅱ. 模式地形与观测站地形高度差异代表性误差 [J]. 大气科学, 31 (3): 449–458. Xu Zhifang, Gong Jiandong, Wang Jianjie, et al. 2007b. A study of assimilation of surface observational data in complex terrain. Part Ⅱ: Representative error of the elevation difference between model surface and observation site [J]. Chinese J. Atmos. Sci. (in Chinese), 31 (3): 449-458.
薛纪善, 庄世宇, 朱国富, 等. 2008. GRAPES新一代全球/区域变分同化系统研究 [J]. 科学通报, 53 (20): 2408–2417. Xue Jshan, Zhuang Shiyu, Zhu Guofu, et al. 2008. Research of new generation global/region variational assimilation system GRAPES [J]. Chin. Sci. Bull. (in Chinese), 53 (20): 2408-2417.
Zhang D L, Fritcsh J M. 1986. A case study of the sensitivity of numerical model simulation of mesoscale convective systems to varying initial condition [J]. Mon. Wea. Rev., 114 (12): 2481–2431.
邵长亮, 闵锦忠. 2015. 集合均方根滤波同化地面自动站资料的技术研究[J]. 大气科学, 39 (1): 1−11, doi:10.3878/j.issn.1006-9895.1406.13263. Shao Changliang, Min Jinzhong. 2015. A study of the assimilation of surface automatic weather station data using the ensemble square root filter [J]. Chinese Journal of Atmospheric Sciences (in Chinese), 39 (1): 1−11
A Study of the Assimilation of Surface Automatic Weather Station Data Using the Ensemble Square Root Filter
SHAO Changliang1, 2, 3and MIN Jinzhong1, 3
1,,210044;2,100081;3,210044
Handling the difference in elevation between a model surface and an observation site is always a challenge in surface data assimilation. However, a reasonable assimilation scheme can efficiently assimilate surface automatic weather station (AWS) data into a mesoscale model. In this paper, surface AWS data are first assimilated into a weather research and forecasting (WRF) model through an ensemble Kalman filter using the Guo et al. (2002) scheme. Then an adjusted scheme is proposed that assimilates 10-m wind observations, 2-m potential temperature, 2-m dew point temperature, and surface pressure. This scheme is then validated by mean square root error analysis, simulated result and assimilation increment analysis, and sensitive experiments to check the assimilation response of each AWS meteorological parameter. Results show that the assimilation of surface AWS data through the ensemble square root filter (EnSRF) using the Guo et al. (2002) scheme can improve the simulation results. The separate assimilation of any element of the surface observation data (temperature, humidity, wind, surface pressure) can affect the forecast of 18 h accumulated rainfall. However, different elements have different impacts, and the one having most influence is the dew point temperature. The use of 2-m potential temperature and 2-m dew point temperature, instead of 2-m temperature and 2-m specific humidity, leads to better simulation results.
Data Assimilation, Ensemble Kalman filter, AWS (automatic weather station) data, Sensitive experiments
1006−9895(2015)01−0001−11
P456.7
A
10.3878/j.issn.1006-9895.1406.13263
2013−09−16;网络预出版日期 2014−07−08
国家重点基础研究发展计划(973计划)2013CB430102,江苏省普通高校研究生科研创新计划项目KYLX_0824
邵长亮,男,1986年出生,博士研究生,工程师,主要从事自动站资料同化的研究。E-mail:shchl1@163.com
闵锦忠,E-mail: minjz@nuist.edu.cn
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
成都信息工程大学学报(2021年5期)2021-12-30 06:25:16
考试与评价·八年级版(2020年4期)2020-10-26 02:25:23
考试与评价·八年级版(2020年1期)2020-10-26 02:24:50
考试与评价·八年级版(2020年1期)2020-10-26 02:24:50
能源(2017年8期)2017-10-18 00:47:39
测绘科学与工程(2017年1期)2017-05-04 03:40:44
太空探索(2016年7期)2016-07-10 12:10:15
通信电源技术(2016年1期)2016-04-16 04:57:35
太空探索(2015年8期)2015-07-18 11:04:44