
脊柱外科术中体感诱发电位监护的模拟训练系统开发*
2015-12-05 12:08徐晗辉徐圣普谢小波崔红岩李佳宁
中国医学装备 2015年1期
徐晗辉 徐圣普 谢小波 崔红岩 李佳宁 胡 勇②*
脊柱外科术中体感诱发电位监护的模拟训练系统开发*
徐晗辉①徐圣普①谢小波①崔红岩①李佳宁①胡 勇①②*
目的:开发一个由模拟人体和系列体感诱发电位(SSEP)训练数据的虚拟训练系统,有效地提高受训者的操作技能和临床技巧。方法:对30例脊柱侧弯病患者进行跟踪手术,采集体感诱发电位信号,提取典型的体感诱发电位信号和噪声数据,开发一个虚拟的训练系统对电生理技师的监护操作进行评价。结果:该系统可通过检测SSEP电极安放的位置产生不同的信号,在评判不同信号输出后训练者需根据自己的经验对信号正常与否以及异常的原因进行判断。结论:本研究使用的SSEP信号均为实际信号的合成,其结果与实际情况相符,具有很强的现实指导意义。
虚拟系统;体感诱发电位;信号发生器;逻辑控制
[First-author’s address] Institute of Biomedical Engineering, Chinese Academy of Medical Sciences & Peking Union Medical College Tianjin 300192, PR China.
模拟训练系统最早出现在飞行员的培训中,并由美国军队将模拟训练的思路引入到了医学训练中。最早的医学模拟训练系统是由挪度(Laerdal)公司开发的人工呼吸模拟训练器,此后模拟训练设备开始在临床技师和医生的培训中发挥重要作用。模拟训练设备可有效地提高受训者的操作技能和临床技巧,如电除颤模型可以有效地让受训者对患者进行心肺复苏训练,尤其是计算机辅助技术和虚拟现实技术的应用,给予了模拟训练系统更多的功能作用[1-3]。
美国国家手术质量改善计划(National Surgical Quality Improvement Program)2011年的调查报告显示,在脊柱外科手术中有0.3%的患者术后死亡,7.6%的概率会发生急性神经系统并发症[4]。近年来,虽然有新的手术方案进入临床,但仍不能消除此类风险[5-7]。
基于体感诱发电位(somatosensory evoked potential,SSEP)的脊神经监护仪已经在脊椎手术中广泛使用,以避免脊髓损伤和术后脊神经并发症[8-12]。然而,对监护仪操作的电生理技师的培训却未能跟上仪器普及的步伐。电生理师除了需要了解不同的影响因素对SSEP信号的影响,还应知晓医生手术的操作过程,方能在SSEP信号异常时给予手术操作者以指导性意见。训练有素的脊髓监护团队在手术中能够起到重要的作用,可以呈现可靠性更高、信号质量更好的SSEP信号[12-14]。为此,本研究开发一套用于训练脊神经监护人员的虚拟系统,可使接受训练者熟悉操作且认识不同因素对SSEP信号所造成的影响。
1 资料与方法
1.1 一般资料
选取2012年香港大学根德公爵夫人儿童医院30例脊柱侧弯的患者,对其进行脊柱矫形手术中SSEP的监测,其中男性与女性比例为1∶1;年龄20~60岁。术中SSEP信号作为本研究的数据库。不同的信号模板包括了不同的潜伏期值、幅值和信噪比情况,并由一位资深的电生理专家进行筛选评判[15-16]。
1.2 系统数据采集
体感诱发电位信号采用美国尼高力公司生产的体感诱发电位检测系统采集,一对位于足内侧胫后神经的贴片电极作为刺激电极。刺激电流的大小以引起脚趾轻微运动的最小电流,一般为10~30 mA。刺激脉冲的频率为5.7 Hz,每次刺激持续时间为300 ms,记录信号采样频率为5 kHz。信号通过5~1000 Hz中的带通滤波器,每个显示波形由100次实测波形叠加而成,以去除环境干扰。
1.3 虚拟训练系统设计
该系统由上位机和模拟人两个部分组成,其中模拟人包括人体模型和信号发生器模块,将信号发生器模块放入人体模型的空腔。在实施训练时需配合体感诱发电位仪使用。上位机预设标准波形输出,让接受训练者找到最佳的检测位点。然后,通过上位机控制模拟人输出特定的变异信号,信号经由体感诱发电位监护仪上的接收电极上传至监护仪显示,使训练者分析信号的情况以及成因,并根据输出信号进行必要的操作处理。
在训练中,训练者先将刺激电极安放至正确的位置,并正确使用SSEP监护设备;随后找到信噪比最高的检测位点;最后根据信号的变化情况找出原因。在SSEP监护仪发出刺激脉冲后CPU板会自动评判参考电极是否连接完好。在满足了刺激电极安放准确和参考电极正确安放两个条件后,安放在模拟人内部的信号发生器会发送信号。
(1)电极设计。在设计整体系统之前信号发生器的信号发送端设计十分重要,每个发送端由3个导电橡胶制成的同心圆环(A、B、C)组成,每个环带宽度为0.4 cm,各环带间用绝缘涂层分离(如图1所示)。
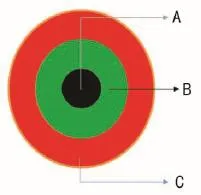
图1 信号发送端放大同心圆环图
(2)模拟人设计。根据系统的设计需求,模拟人体系统还应该包括上位机软件和无线通讯模块。在模拟人体上,共安放有6个电极(如图2所示)。在使用中需要根据不同的检测目的选择不同的刺激部位和检测位点。对左上肢和(或)下肢进行刺激时检测位点为C4’;对右上肢和(或)下肢进行刺激时检测位点为C3’;而对脊髓直接刺激时检测位点为Cz。本研究中仅以刺激位点为右下肢,检测位点为C3’进行说明。
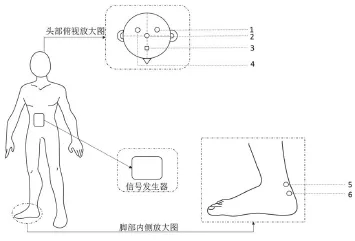
图2 模拟人以及电极摆放图
(3)模拟训练系统逻辑设计。系统设计如图3所示。
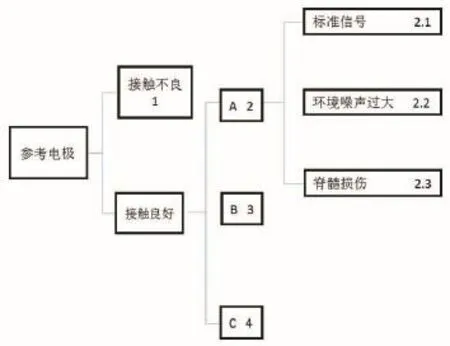
图3 模拟训练系统逻辑图
在图3的“接触不良1”中,检测电极未接触到图1中所示3个区域,刺激电极接触不良好时脊髓监护仪中只能显示环境噪声,在这种情况下放大器输出为饱和的信号。若电极3接触良好,则有A2、B3、C4三种情况,分别对应了图1中的A、B、C三个区域。检测电极位于图1的A、B、C三个区域会呈现不同的信噪比和信号幅值,其中A区域信噪比最高信号幅值最大,C区域信噪比最低信号幅值最小,B区域居中。训练者应先找到目标位点即找到检测电极接收端对应的A区域,在A区域内有可能会检测到如图3所示的标准信号(2.1)、环境噪声过大(2.2) 和脊髓损伤(2.3)三种信号,训练者根据所显示的信号波形进行分析,找出信号与标准信号差别的原因。
2 结果
本研究对该系统进行了检测,其中刺激位点为右下肢足内侧胫后神经,检测位点为图2中的1号位点的情况。
在标准信号输出时图3中A2、B3、C4三种情况的信号比较结果如图4所示。
图4显示,黑色线条拥有最高的信噪比,信号质量良好;红色线条显示有效信号幅值非常小,几乎不能辨别;位于绿色线条质量居中。这一结果符合临床实际情况。由于皮肤阻抗阻值较大,较小的位点差别会造成信号的质量下降,因此找到A区域信号的标准信号是获得高质量信号的前提。
在图2的1号位置检测到图3中A2的2.1、2.2和2.3情况的信号比较结果如图5所示。
图5显示,黑色曲线拥有最高的信噪比和幅值;绿色曲线含有较多高频干扰,但是相对黑色曲线无潜伏期和幅值的改变;而红色曲线相对于黑色曲线有明显的幅值降低和潜伏期的延长。对于高频噪声的出现(绿色曲线的情况),较有可能的原因是骨科钻、电刀类的仪器、或手术室电路接地不良而造成。此时,应该尽量辨认波形,如果噪声过大,且手术区域为敏感区域,应要求这些仪器间隔使用,以方便进行检测。而医源性的影响会令信号突然变小,甚至消失,波形的潜伏期也会有所延长(红色曲线的情况),此时应及时停止手术,并对手术操作进行检查。
在临床实际操作中,有许多因素会影响到体感诱发电位的信号,包括患者的体温、血压、心律,麻醉情况及刺激频率等[13,17]。本研究中实验数据采集尽量避免了这些因素,即使如此,在手术过程中也会出现在无脊髓触碰情况下的SSEP信号的变化。因此,从模拟人中发出的信号是经由筛选后的信号。该系统可以在不同的检测位点输出不同的信号,而本研究只考虑了从右侧下肢刺激的情况。同时,模拟人内的信号发生器也可输出其他类型的信号对训练者进行训练。
3 结论
在脊神经手术过程中,神经电生理扮演着非常重要的角色,本研究开发的一套针对SSEP信号监护的虚拟训练系统,可以根据不同的情况和要求提供不同的信号输出,使用的信号均为实际信号的合成,与实际情况相符,具有很强的现实指导意义。但是该项训练并不能完全代替实际的临床训练,临床上出现的情况和可变因素更多,训练者仍然需要进一步的临床实践。同时,该系统在实践应用中仍有许多需要改进的地方有待进一步研究。
[1]Zendejas B,Brydges R,Wang AT,et al.Patient outcomes in simulation-based medical education:a systematic review[J].J Gen Intern Med,2013,28(8):1078-1089.
[2]Rajakumar B,Raj T,Swaminathan S,et al.Presence sensor based medical monitoring model with intelligent response system[C].Computer Communication and Informatics(ICCCI),2013 International Conference on,2013:1-4.
[3]Tian D,Zhang Z,Shi Y,et al.Design of ECG Simulation Waveform Generating System[J].Modern Electronics Technique,2010,33(9):141-144.
[4]Schoenfeld AJ,Ochoa LM,Bader JO,et al.Risk factors for immediate postoperative complications and mortality following spine surgery:a study of 3475 patients from the National Surgical Quality Improvement Program[J].J Bone Joint Surg Am,2011,93(17):1577-1582.
[5]Takahashi Y,Sato T,Hyodo H,et al.Incidental durotomy during lumbar spine surgery:risk factors and anatomic locations:clinical article[J]. J Neurosurg Spine,2013,18(2):165-169.
[6]Abdul-Jabbar A,Takemoto S,Weber MH,et al.Surgical site infection in spinal surgery:description of surgical and patient-based risk factors for postoperative infection using administrative claims data[J].Spine,2012,37(15):1340-1345.
[7]Baker GA,Cizik AM,Bransford RJ,et al.Risk factors for unintended durotomy during spine surgery:a multivariate analysis[J].Spine J,2012,12(2):121-126.
[8]Yue Q,Martinez Z.Monitoring superficial peroneal nerve somatosensory evoked potential during L4-5 lumbar root decompression[J]. Spine J,2013,13(8):922-925.
[9]Thirumala PD,Kodavatiganti HS,Habeych M,et al.Value of multimodality monitoring using brainstem auditory evoked potentials and somatosensory evoked potentials in endoscopic endonasal surgery[J].Neurol Res,2013,35(6):622-630.
[10]Vanhegan I,Cannon G,Kabir S,et al.Response to abnormal intra-operative somatosensory evoked potential(SSEP)monitoring in spinal deformity surgery and the effect on reducing neurological harm:a single institutional review of 2386 consecutive cases[J].Bone Joint Journal Orthopaedic Proceedings,2013,95(Suppl):182-182.
[11]Thirumala PD,Kassasm AB,Habeych M,et al.Somatosensory evoked potential monitoring during endoscopic endonasal approach to skull base surgery:analysis of observed changes[J]. Neurosurgery,2011,69(1):64-76.
[12]Jankowski PP,O'brien RA,Cornwall GB,et al. Intraoperative Neurophysiology Monito--ring,Minimally Invasive Spine Surgery:Springer,2014:43-53.
[13]Hagen K,Ehlis AC,Schneider S,et al.Influence of different stimulation parameters on the somatosensory evoked potentials of the nervus vagus-how varied stimulation parameters affect VSEP[J].J Clin Neurophysiol,2014,31(2):143-148.
[14]Chen Z,Chen L,Kwon P,et al.Detection of positional brachial plexus injury by radial arterial line during spinal exposure before neuromonitoring confirmation:a retrospective case study[J].J Clin Monit Comput,2012,26(6):483-486.
[15]Hu Y,Liu H,Luk KD.Signal-to-noise ratio of intraoperative tibial nerve somatosensoryevoked potentials[J].J Clin Neurophysiol,2010,27(1):30-33.
[16]Hu Y,Liu H,Luk KD.Time-frequency analysis of somatosensory evoked potentials for intraoperative spinal cord monitoring[J].J Clin Neurophysiol,2011,28(5):504-511.
[17]Fiorio M,Recchia S,Corra F,et al.Behavioral and neurophysiological investigation of the influence of verbal suggestion on tactile perception[J]. Neuroscience,2014,258:332-339.
Development of a virtual training system for intraoperative somatosensory evoked potential monitoring
XU Han-hui, XU Sheng-pu, XIE Xiao-bo, et al// China Medical Equipment,2015,12(1):2-5.
Objective: To develop a modeling-based human body and a series of training dataset of somatosensory evoked potential (SSEP). Methods: In this study, 30 scoliosis patients underwent correction surgery were recruited to collect intraoperative SSEP signals. Based on those SSEP dataset, various noises and failures simulation were generated by a contaminated interference or signal reduction. Results: We developed a virtual training system to perform an online assessment of intraoperative SSEP monitoring operation. Using this system, the connection of the electrodes will be evaluated, so that the outcomes of SSEP monitoring will be simulated with various kinds of signals. After identifying the different kinds of output, the trainee can be trained by own practice, while the monitoring skill can be evaluated by the system. Conclusion: This virtual training system can be used as a training tool in medical school, as well as clinical training centre, which improve the skill of electrophysiological test and intraoperative SSEP monitoring.
Virtual training system; Somatosensory evoked potential; Signal generator; Logical control
1672-8270(2015)01-0002-04
R681.5
A
徐晗辉,男,(1990- ),硕士研究生。中国医学科学院北京协和医学院生物医学工程研究所,研究方向:神经电生理信号采集分析,呼吸信号提取算法。
10.3969/J.ISSN.1672-8270.2015.01.001
2014-09-15
国家自然科学基金(81301287)“体感诱发电位中脊髓功能监护异常逻辑判别准则的研究”;国家自然科学基金(81271685)“基于电刺激诱发体感事件相关点位(ERP)的脑机接口新方法”;国家科技支撑计划(2012BAI16B03)“脑-机接口中的微弱信息采集技术及产品开发”
①中国医学科学院北京协和医学院生物医学工程研究所 天津 300192
②香港大学矫形及创伤外科学系 香港 999077
*通讯作者:yhud@hotmail.com
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05
当代医药论丛(2020年12期)2020-08-17
电子制作(2019年13期)2020-01-14
中国现代神经疾病杂志(2020年11期)2020-01-08
中国生物医学工程学报(2019年3期)2019-07-16
中学科技(2018年2期)2018-03-15
中国体育教练员(2017年3期)2018-01-19
电子制作(2017年13期)2017-12-15
中学科技(2016年12期)2017-01-07
中学科技(2016年11期)2017-01-07
