基于位置伺服控制技术的电容器组投切相控真空断路器设计
2015-12-04 03:33:20袁端磊钟建英陈占清
河南城建学院学报 2015年4期
程 显,袁端磊,何 周,钟建英,陈占清
(1.郑州大学电气工程学院,河南 郑州450000;2.平高集团有限公司,河南平顶山467000)
断路器在关合或开断电路的瞬间,系统的电压和电流相位通常是随机的,当断路器关合并联电容器组、电抗器、空载变压器以及空载线路时常会产生幅值、频率很高的涌流和过电压[1-3]。这不但给断路器和电力系统中的其他一次设备带来不良影响,还会影响电能质量和系统可靠性[4]。同步开断技术可有效抑制断路器操作暂态[5-6],其原理是根据线路电压或电流相位合理设定断路器开合时刻,从而抑制电网中过电压和涌流的产生。同步开断技术优于合闸电阻方案,在电能质量和输配电领域具有广泛的应用前景。
1998年国际大电网会议(简称CIGRE)对同步断路器的优缺点进行讨论,根据理论分析和现场应用情况确认了同步断路器的可靠性和有效性[7-9];2004年CIGRE针对同步断路器的特殊设计和测试要求,制定了相关指导标准。目前,在国外同步断路器已经大量应用于正常负荷(并联电容器组、空载变压器和电抗器)的开合,ABB公司利用闭环控制方案研制出了世界第一台配置永磁机构的同步断路器;在国内实现断路器同步操作的主要方案是控制系统利用人工智能技术对永磁机构的动作时刻进行预测,考虑温度、电容电压和老化等影响分、合闸动作的分散性因素,计算出断路器执行单元的触发延时,控制断路器在期望电压、电流相位动作,从而实现同步操作[10-13]。国内在此技术领域的研究尚不成熟,同步开关的实际应用方面主要以试点引进为主。
同步断路器能否在复杂条件下达到预期开断效果关键在于断路器分、合闸相位的时间精确度[14-16],而影响时间精确度的主要因素是断路器动作时间的分散性。本文对电容器组投切的暂态过程进行分析,论述不同连接方式下电容器组的开合策略、不同因素对真空开关分、合闸时间的影响并进行修正,分析永磁机构动态特性并在此研究基础上设计一种基于伺服控制技术的相控真空断路器。
1 电容器投切暂态过程
电力系统常采用并联电容器进行无功补偿,然而在10 kV系统中由于操作过电压时常引发电容器损坏、断路器炸裂等事故,有必要对投切电容器组的暂态过程进行研究,探索操作过电压和暂态涌流的变化规律,提出抑制措施。

图1 三相等值仿真电路
1.1 10 kV三相电路仿真模型
以10 kV并联电容器回路为仿真背景,回路中的各种电气设备参数选取实际设备的等效值。搭建图1所示的三相电路仿真模型,其中 ΔT设置为1E-7,仿真时间为1 s。
1.2 10 kV并联电容器合闸暂态过程
1.2.1 同期合闸操作
假定三相断路器同期合闸,合闸相角以A相相电压为准,在合闸角为90°时合闸,此时合闸电容电压和合闸涌流的仿真波形如图2所示。
由图2可知,合闸暂态过程持续时间长达600 ms,暂态过程中电压、电流都呈现出振荡频率高、持续时间长、幅值较高的特点。电容器的电压和合闸涌流都由稳态分量叠加一个暂态分量构成。电容器过电压、合闸涌流的最大值皆出现在A相(红相),其电压峰值为16.8 kV(约为2.05倍稳态相电压幅值),涌流峰值达到2.2 kA(约为5.2倍稳态相电流幅值)。
1.2.2 非同期合闸操作
三相断路器非同期合闸操作可等效为先合两相再合一相的情况,后合相的操作延时会影响合闸操作暂态过程的变化。采用图1所示的ATP模型进行仿真计算,设置A、B相开关在ΦA=π/6和ΦA=0两种情况下闭合,C相开关滞后2 ms闭合。
(1)ΦA=π/6+kπ 时,UA=UB,即 UAB=0,A、B 相开关合闸的操作时间为3.333 ms,C相开关合闸时间为5.333 ms,此时合闸电容器电压和合闸涌流波形如图3所示。
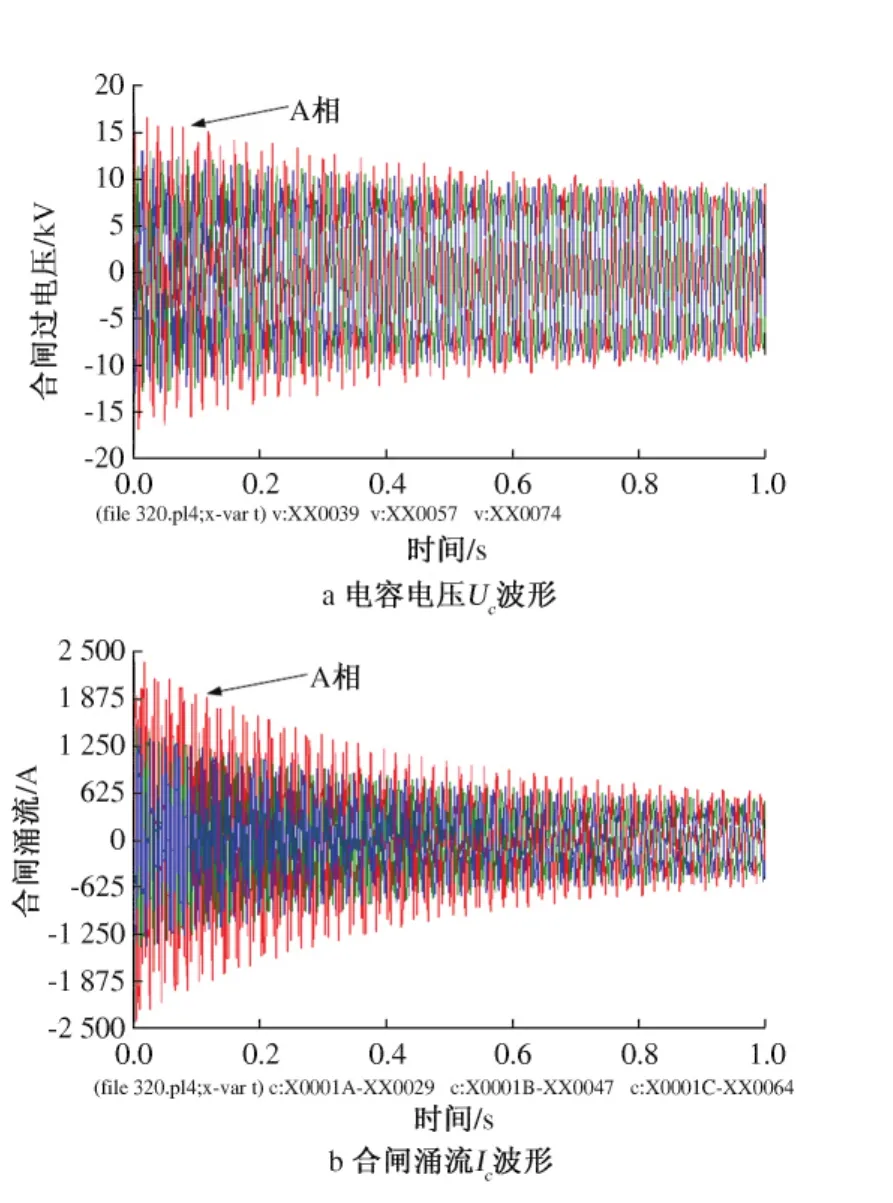
图2 同期合闸时暂态过程仿真结果
由电容器电压波形可以看出,先合闸的A、B两相的振荡幅值明显下降,最大合闸过电压出现在后合相C相(蓝相)。由合闸涌流波形可以看出,涌流最大值也出现在C相,C相涌流峰值约为2.1 kA。
(2)ΦA=0或kπ时,A、B相间电压差最大,即最大,设置A、B相开关合闸操作时间为0 ms,C相开关合闸时间为2 ms,此时合闸电容器电压和合闸涌流波形如图4所示。
图4中电容器电压波形与之前的电压波形相比,B、C两相产生的电压振荡更加剧烈,最大合闸过电压出现在B相(绿相),合闸过电压峰值为19.1 kV(约为2.34倍稳态相电压幅值)。对比合闸涌流波形可以发现:B、C两相的电流振荡明显强烈,出现在B相的涌流峰值高达2.86 kA(约为6.6倍稳态相电流幅值)。
比较图2~图4可知,在以A相相电压相角90°为合闸操作相角时,非同期操作下合闸涌流峰值明显增大,幅值变化更为剧烈。仿真验证了在操作方式、系统状态等因素的影响下,系统关合电容器组时可以产生数倍于稳态相电流幅值的过电流。
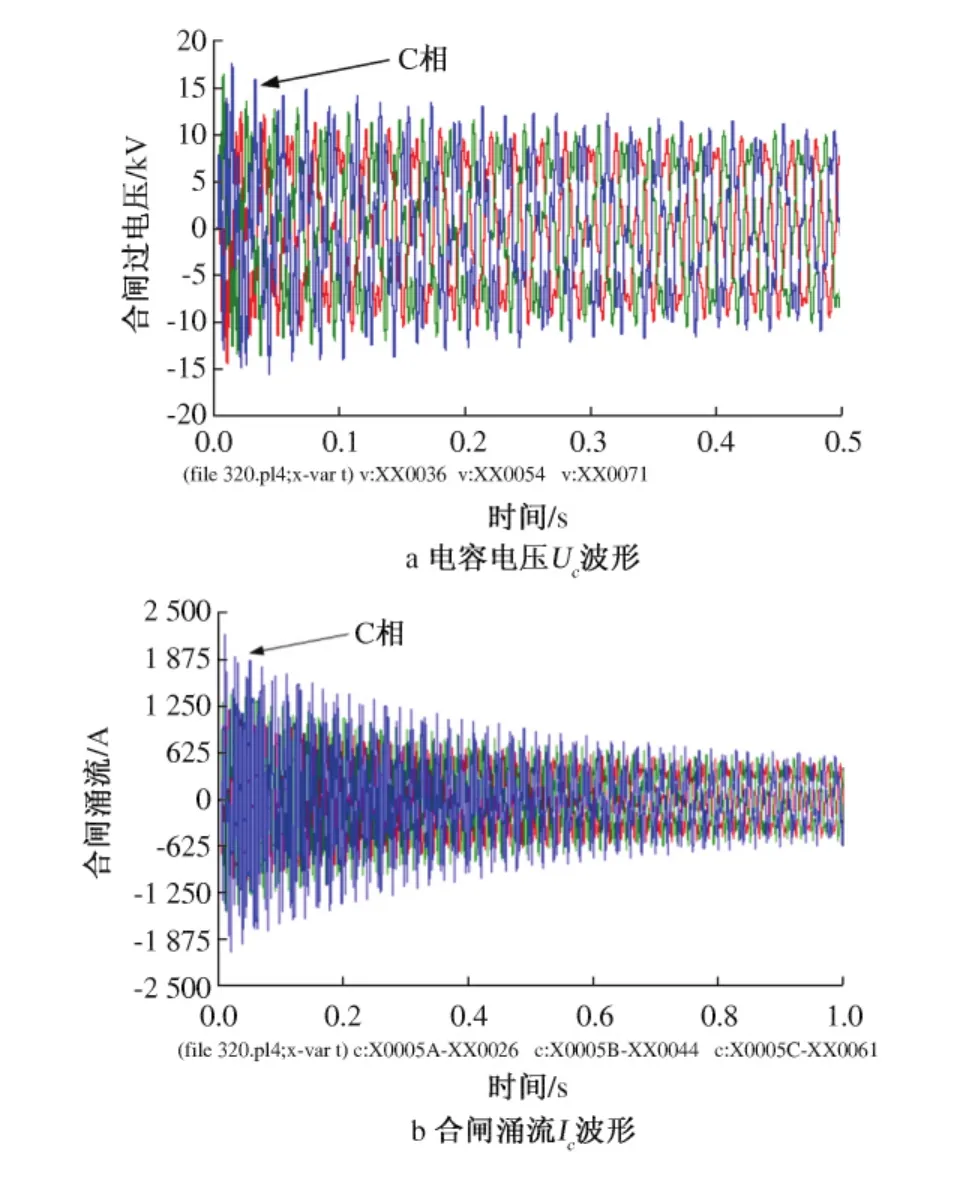
图3 UAB=0时非同期合闸暂态过程仿真结果
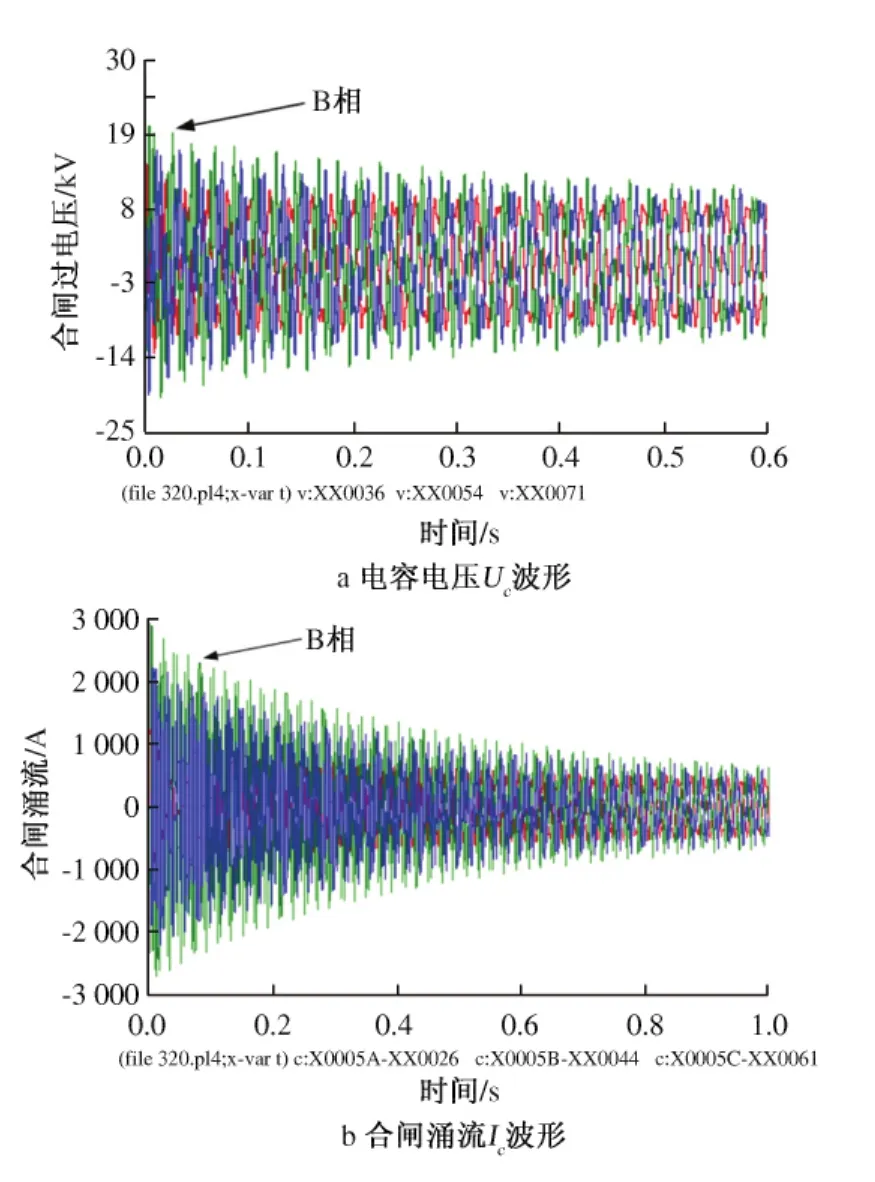
图4 ΦA=0时非同期合闸暂态过程仿真结果
1.3 10 kV并联电容器分闸暂态过程
以图1所示的三相电路仿真模型为基础,设定断路器在系统稳态(合闸操作1 s后系统进入稳态)下进行随机性分闸操作,对分闸暂态过程的电压电流进行仿真计算,断路器负载侧电压、断路器触头电流仿真波形如图5所示。
由图5中震荡波形的变化可知,由于电缆对地电容的影响,不同暂态阶段形成的电路结构也不同。从仿真波形中截取多个有效周期后,计算平均周期所得的振荡电压的等效振荡频率为:A相(红相)电流过零后,A相负载侧电压产生振荡,振荡频率为10.31 kHz;B、C两相电流同时过零后,三相负载侧电压都产生振荡,振荡频率变为12.62 kHz。三相自由振荡电压最大值约为2.5 kV,振荡电压的上升率最大值为 63.1 kV/ms。
断路器负载侧可经电缆对地电容在相间形成自由振荡回路,产生高幅值的高频振荡。断口瞬态恢复电压由负载侧电缆端部电压决定,振荡频率主要由电缆对地电容决定。断路器负载侧的振荡过电压作用于断路器断口处后形成自由恢复电压,而自由恢复电压则会诱发电弧重燃,导致分闸失败。
2 电容器组选相投切策略
并联电容器组同步关合的最佳相位是开关触头两端电压过零时刻。但三相电压之间存在的相位差以及电容器组在电网中不同的连接方式,使三相的开关触头两端电压过零时刻不同。因此,要实现无功补偿电容器组同步投切,应根据电容器组的不同连接方式采取相应投切策略。此外,还应考虑选取的参考信号对投切策略的影响。
2.1 中性点接地电容器组同步关合策略
在对中性点接地的三相补偿电容器组进行同步关合时,由于每相开关触头两端电压为相电压,故其关合策略与单组电容器相同。选取A相电压为参考电压,并作为控制系统电源。若A相在相电压过零时刻先行关合,关合过程中产生的过电压会对永磁机构的辅助电压和控制系统电源造成干扰,降低同步关合的精度,所以A相电压过零后,3组电容器组的关合顺序为C—B—A(见图6)。图6中tad、tbd、tcd为每相同步关合的延迟触发时间,tam、tbm、tcm为每相固有的合闸时间。
2.2 中性点不接地电容器组同步关合策略
当关合中性点不接地的三相电容器组时,一般采用的策略是:在某两相电压相等时同时关合该两相,在90°后中性点电压和第三相同时过零时关合第三相。但在工程实践中,开关关合相位的误差可能会导致首合两相间电压出现较大的偏差,从而产生较大的涌流和过电压。为使首合相电容器在投入系统时不形成回路,采取独立选相关合策略,即参考电压过零后的下一个相电压过零点作为首合相关合时刻,第二关合相则在该相电压与首合相电压相等时投入。此时首合两相补偿电容器组的投入只受第二关合相关合相位误差的影响。参考电压可选取线电压或相电压,它们具有不同的关合时序。图7为参考电压为线电压UAB时中性点不接地的三相电容器组同步关合时序。

图5 随机分闸暂态过程仿真结果

图6 参考电压为UA时同步关合时序

图7 参考电压为UAB时同步关合时序
2.3 电容器组同步切除策略
由于电容电流的相位超前电容电压的相位90°,即电容电压峰值时刻对应电容电流过零点。如果在电容器组同步切除时选择电压为参考信号,那么参考电压过零点与电容开断时电流零点之间具有固定关系。对于中性点接地补偿电容器组,同步切除策略与单组电容器切除策略相同,即在每相相电压过零时刻切除;对于中性点不接地补偿电容器组,则采取先切除一相补偿电容器组,延时1/4周期后,再同时切除后两相的同步切除策略。
3 低分散性操动机构设计
当关合和投切策略确定后,决定同步开关操作成功与否的关键因素是断路器在分合闸的过程中的精确度,这要求其动作可靠且动作分散性低。为实现三相独立动作并且操动机构体积较小,综合考虑后选取单线圈永磁机构为操动机构。由于断路器断口电压与合闸位移成正比关系,若断路器的合闸速度较低,达不到预计要求,断口将在预定合闸点前发生预击穿而导通,产生较大的瞬态电压。断路器合闸线圈放电电流的大小与励磁电源的电解电容器容量和充电电压大小有直接关系。同时,温度变化对合闸线圈电阻值、电容值和操动机构中永磁体性能的影响以及断路器触头因触头弹跳和电弧燃烧等因素产生的磨损和老化都会对分合闸时间造成影响。
3.1 永磁机构的动态特性
永磁机构与真空断路器直接相连,伺服控制器通过调节合闸线圈的电流大小改变触头的运动轨迹。为了实现同步开断,要求合闸速度为0.7 m/s、分闸速度为1.7 m/s。永磁机构由电容对线圈放电驱动,此运动过程可视为一个动态的能量转换过程。将机构的触动过程视为运动过程的特殊情况,由基尔霍夫定律和牛顿运动定律构建运动过程的数学模型为:

式中:v(t)为动铁芯运动速度;x(t)为动铁芯运动位移;F(t)、Ff(t)分别为动铁芯所受的电磁吸力和系统反力;m为归算到动铁芯的质量。其中,ζ=0时为机构触动过程,ζ=1时为运动过程。
3.2 合闸过程的动态特性
根据式(1),采用Matlab及相关仿真软件对永磁机构合闸过程中的受力、合闸速度、位移及动作过程中的电容器电压、电流进行仿真计算,仿真结果如图8所示。
在图8a中,真空泡反力包括分闸簧压力、触头弹簧压力及断路器自闭力,电磁吸力大于真空泡反力时合力大于零,触头开始合闸动作。随着合力的变化,动铁芯在合闸初期迅速加速,即将到达合闸位置时急剧减速,避免触头间碰撞造成弹跳。根据图8b可计算出合闸速度约为2 m/s,高于要求合闸速度0.7 m/s(合点前6 mm内的平均速度),满足合闸调速的需求。由图8c可发现,单次合闸操作电容电压下降约30 V,能量消耗较小。

图8 永磁机构合闸运动特性
3.3 分闸过程的动态特性
分闸过程中永磁机构的动态特性如图9所示。分闸受力曲线中,真空泡反力包括触头弹簧压力和断路器自闭力。由图9b可计算出分闸速度约为2.6 m/s,大于要求分闸速度1.7 m/s,可实现分闸调速。单次分闸操作电容电压最大下降25 V,电容剩余能量能够完成下次的合闸操作。
4 断路器操动机构伺服控制方案
断路器操动机构伺服控制单元通过调节操动机构线圈电流大小控制永磁机构受力,从而控制操动机构即动触头运动行程。伺服控制方案基于PWM技术建立闭环控制,由伺服控制单元实时比较给定的操动机构运动轨迹与励磁电流理想曲线和测得实际的状态量,同步调整相应的PWM波形脉宽,实现实时控制线圈励磁电流大小,确保永磁机构按照理想的行程曲线运动,补偿各种环境因素变化引起的行程曲线偏差及动作时间分散问题。
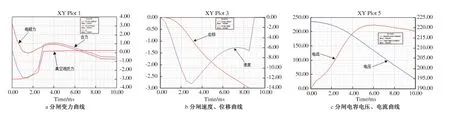
图9 永磁机构分闸运动特性
4.1 真空断路器操动机构的位置伺服控制单元设计
真空断路器操动机构的位置伺服控制单元主要由信号采集部分、时序控制部分、机构位置采集部分、运动控制部分、励磁电流PWM驱动部分构成。励磁电流PWM驱动部分通过IGBT组成的桥式电路实现单稳态永磁机构线圈励磁电流调节,改变施加在动铁芯上的电磁力,补偿触头运动位置偏差,IGBT桥的控制信号由位置伺服控制部分提供;机构位置采集部分和信号采集部分负责实时监测开关操作过程中触头运动位置S和线圈电流Icoil,并与设定轨迹比较,控制PWM逆变单元中IGBT控制信号占空比。真空断路器操动机构伺服控制单元原理如图10所示,Icoil为永磁机构线圈电流,S为触头运动位置,Uref为参考电压信号,Iref为参考电流信号。
4.2 位置伺服控制单元性能测试
伺服控制单元将模糊控制与经典PI控制相结合,采用数字信号处理器设计实现。为验证其性能与开关操作时间的一致性,对35 kV永磁机构真空断路器进行测试。试验以电容充电电压220 V、PWM频率4 kHz、占空比50%时触头的运动轨迹作为参考,测试在改变电容电压、环境温度和闲置时间等因素影响下真空断路器分、合闸时间和伺服控制性能。
(1)设定储能电容初始电压变化范围200~240 V,每个测试电压下进行30次分、合闸测试。不同电容电压下真空开关触头合闸时间的统计特性如图11所示。采用位置伺服控制后,触头合闸时间控制精度明显提高,电容电压变化对动作时间的影响很小,约为0.004 ms/V,同时控制合闸弹跳时间小于0.5 ms,减弱了因合闸弹跳引起的触头烧蚀带来的影响。

图10 操动机构伺服控制单元原理图
(2)根据IEC 62271—302同步开关标准对断路器样机进行闲置时间影响测试,测试结果见图12。通过位置伺服控制单元修正,真空断路器闲置168 h时,合闸时间标准差小于0.1 ms,开关合闸动作时间均值为45.57 ms,闲置时间带来的影响明显降低。
(3)环境温度影响测试结果见图13。外界环境温度变化对同步真空开关动作时间的影响可通过位置伺服控制单元的调整得到有效补偿,使开关合闸时间受环境温度影响变化小于0.1 ms。
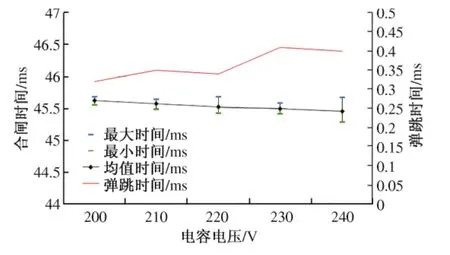
图11 不同电容电压下合闸时间统计特性
5 样机研制
基于上述研究研制了10 kV相控真空断路器,其总体结构及样机如图14所示。断路器主要分为5个部分,自上而下依次为固封极柱、断路器操动机构、传感器信号采集部分、真空断路器伺服控制单元和励磁电容。永磁机构与真空灭弧室动触头相连,传动过程无二次传动部件。为实现选相功能,使每一相分、合闸动作可控,断路器每相均配置独立的永磁机构。

图12 不同闲置时间下合闸时间的统计特性

图13 不同环境温度下合闸时间的统计特性
传感器信号采集部分用来实现开关触头运动行程监测。
真空断路器位置伺服控制单元的主要功能为:
(1)保证断路器分、合闸操作的动作精度;
(2)设置选相分、合闸相位,具备单相与三相控制选择配置功能,同时能够记录分、合闸操作的电压、电流波形;
(3)对断路器一次本体的电压、电流、位置、故障等参数进行在线检测。
控制单元整体控制逻辑如图15所示,实现同步开关的关键是采用智能模糊控制算法和PWM技术控制开关触头按照设定轨迹运动,保持断路器分、合闸时间的长期一致性。
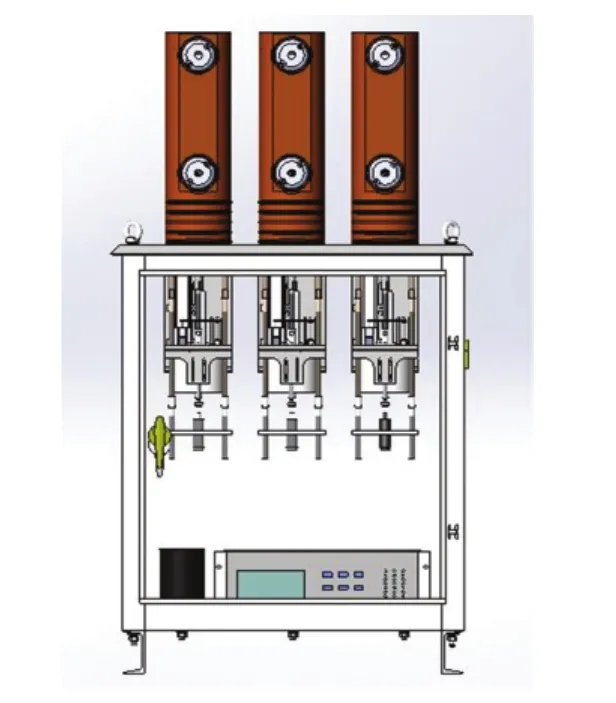
图14 10 kV相控真空断路器样机
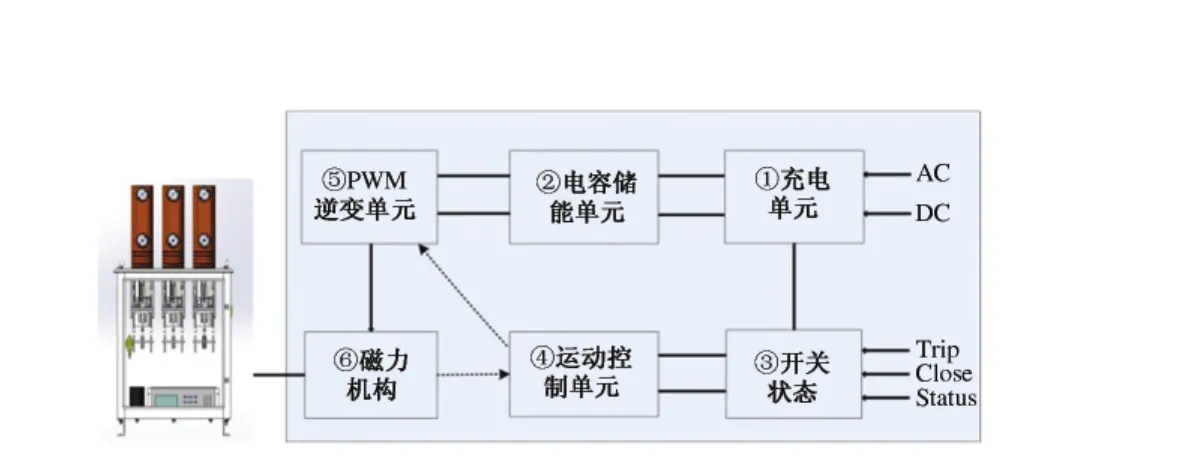
图15 控制系统逻辑图
6 结论
运用ATP软件进行了断路器投切三相电容器的仿真计算,仿真结论证明:合理设置电容器投切过程中断路器各相的分、合闸相位,可有效地抑制暂态过程带来的不良影响。本文根据仿真结论研制了一种基于位置伺服控制技术的10 kV相控真空断路器,其位置伺服控制单元能有效地消除电容电压、闲置时间、外界温度等因素变化对操动分散性的影响,可将分、合闸操作的动作精度控制在±0.5 ms,保证断路器动作时间的低分散性,满足断路器选相需要并有效地降低操作所引起的系统涌流和过电压。
[1] 林莘.永磁机构与真空断路器[M].北京:机械工业出版社,2002:107-110.
[2] 周元清,彭建春,王官宏,等.特高压交流输电线路串联补偿合闸操作过电压研究[J].电力自动化设备,2008,28(1):23-26.
[3] 丁富华,段雄英,邹积岩.基于同步真空断路器的智能无功补偿装置[J].中国电机工程学报,2005,25(6):30-35.
[4] DELFINO B,FOMARI F,GEMME C.Power quality improvement in transmission and distribution networks via synchronous switching [C]//Transmission and Distribution Conference and Exposition,2001 IEEE/PES St Louis,Missouri,USA:IEEE,2001:367-372.
[5] HORINOUCHI K,TUSKIMA M,TOHYA N,et al.Synchronous Controlled Switching by Vacuum Circuit Breaker(VCB)with Electromagnetic Operation Mechanism[C]//IEEE international Conference on Electric Utility Deregulation,Restructuring and Power Technologies.Hongkong:IEEE,2004:529-534.
[6] 方春恩,李伟,杨立锋,等.采用模糊控制和脉冲宽度调制技术的同步真空开关位置伺服控制器设计[J].高电压技术,2012,38(6):1327-1333.
[7] CIGRE Working Group 13.07.Controlled switching of HVAC circuit breaker:guide for application line,reactors,capacitors,transformers(Part 1)[J].Electra,1999(183):43 -47.
[8] CIGRE Working Group 13.07.Controlled switching of HVAC circuit breaker-planning,specification and testing of controlled switching system[J].Electra,2001(197):63-68.
[9] GOLDSWORTHY D,ROSEBURG T,TZIOUVARAS D,et al.Controlled switching of HVAC circuit breaker:application examples and benefits[C]//61st Annual Conference for Protective Relay Engineers.College Station,TX,USA:IEEE,2008:1-4,8.
[10] 张庆杰,袁海文.配永磁机构的真空断路器同步分合闸控制系统设计与实现[J].电力自动化设备,2010,30(3):98-103.
[11] 陈明帆,段雄英,黄智慧,等.真空开关动作时间的自适应控制[J].中国电机工程学报,2010,30(35):22-26.
[12] 段雄英,黄智慧,廖敏夫,等.基于多元线性回归法的相控开关操作时间的补偿与预测[J].电力自动化设备,2009,29(7):72-75.
[13] 吕军,牟龙华.基于预充电的电容器组投切控制策略[J].电力自动化设备,2010,29(6):62-66.
[14] 林莘,曹辰,李斌,等.永磁机构真空断路器的动态特性仿真及分闸弹跳分析[J].高电压技术,2013,39(7):1772-1777.
[15] RIOUAL M,DIGARD H,MARTIN C,et al.Field application of a synchronous controller based on measurement of residual fluxes for the energization of a set- up transformer[C]//IEEE PES General meeting.St Louis,Missouri,USA:IEEE,2011:1-8.
[16] 游一民,陈德桂,张银昌,等.真空断路器关合速度与预击穿对同步关合的影响研究[J].电工技术学报,2004,19(7):85-89.
猜你喜欢
大电机技术(2021年5期)2021-11-04 08:58:28
物理之友(2020年12期)2020-07-16 05:39:20
电子制作(2019年22期)2020-01-14 03:16:28
山东冶金(2019年5期)2019-11-16 09:09:38
通信电源技术(2018年3期)2018-06-26 06:33:02
现代职业教育·中职中专(2018年10期)2018-05-14 13:52:20
通信电源技术(2016年6期)2016-04-20 06:21:10
电测与仪表(2015年20期)2015-04-09 11:53:46
水电站机电技术(2014年4期)2014-10-13 08:30:12
河南科技(2014年4期)2014-02-27 14:07:19