受振动影响的手部操作仿真与操作精度研究
2015-12-03 08:29:56王冬阳
图学学报 2015年4期
王冬阳, 杨 光
(北京航空航天大学机械工程学院,北京 100191)
受振动影响的手部操作仿真与操作精度研究
王冬阳, 杨 光
(北京航空航天大学机械工程学院,北京 100191)
在手及手臂参与控制的操作中,由操作端传递给手及手臂的振动会对操作精度产生影响。利用计算机程序仿真了一种在虚拟空间中的直线路径追踪操作,以可编程的力觉交互设备Phantom作为操作端,研究低频率段不同参数的振动对用户操作精度的影响。振动频率对操作误差的影响呈非线性,显著的影响出现在2 Hz附近。振动幅值对操作误差的影响近似线性,振动方向对操作误差也有一定影响。
人机工程;交互仿真;操作精度;手传振动
人在操作机械或电动设备时,由设备本身或外部原因引起的操纵端振动会直接影响用户的控制精度,从而引起操作误差。该类操作一般由手或手臂参与控制,振动通过手柄或把手传递到人手和手臂系统,这类振动被称为手传振动[1],按其对人体的影响特性分类,手传振动属于局部振动。
了解手传振动对操作精度的影响,对于交互产品设计、手及手臂力觉敏感性研究和操作误差评价都有重要的参考意义。
1 研究现状
国内外有关振动对人体影响的研究,主要集中在人体力觉敏感度和振动引起的人体伤害两个方向。
力觉敏感度指人体对施加在其身体上的外界力量刺激的敏感程度,手传振动属于振触觉刺激,Gescheider等[2]在考虑了包括年龄、温度、接触面积等因素的情况下,对振触觉阈值做了详细的测量。Hatzfeld等[3]设计了专门测量指间振触觉绝对阈值的测量系统。
有关振动对人体的伤害,一般认为手传振动是引起手指末梢神经、血管损伤的主要原因[4],目前国内外对于人体暴露于手传振动的测量与评价已经有了较为成熟的标准[5-6]。
本文关于手传振动对操作精度影响鲜见于以往的研究中,主要原因是操作结果与误差不容易测量,一方面手及手臂本身会对操纵端振动产生一定的机械阻抗,另一方面用户会有意识地控制上肢肌肉摆脱振动的影响,尽量准确地完成操作,同时进行此类实验需要适合的设备支持。
本文利用可编程的力觉反馈交互设备,通过图形化的计算机程序模拟了一个虚拟的直线路径追踪场景,仿真了受振动影响的手部操作,通过对操纵笔施加不同参数的振动,并采集用户操作轨迹,从得到的结果数据中分析出振动对操作误差的影响。
2 研究方法
2.1 实验设备
实验中采用 Geomagic公司生产的 Phantom Premium 1.5HF(简称 Phantom)力反馈设备作为交互设备(如图1),该设备可提供1 kHz力渲染刷新频率,采样精度0.007 mm,并且可以输出可编程的力觉反馈,其被广泛应用于力觉交互相关研究。实验中用户可通过手持 Phantom末端与虚拟环境进行交互。

图1 Phantom Premium 1.5HF 设备
2.2 程序设计
程序在VS2005环境中进行设计,使用C语言开发,力觉渲染部分使用与设备配套的OpenHaptics工具包实现,场景的图形渲染部分通过OpenGL实现。
振动由程序控制 Phantom输出按正弦规律变化的驱动力来引发。输出力f是关于时间t的函数为:

式中,F0为驱动力幅值,ω为角频率。在上述驱动力作用下,手持系统会产生受迫振动,受迫振动达到稳定状态时,其振动的频率与驱动力频率相同。相关代码如下:
//timer即时间变量,instRate存储了设备刷新频率
timer+=1.0/instRate;
//该函数计算力向量并存储在数组 force中,数组direction存储了当前时刻力的方向向量,参数3为根据公式计算的输出力大小,其中变量 vibrationAmp与vibrationFreq分别存储了幅值与频率
hduVecScale(force, direction, vibrationAmp*sin (timer*vibrationFreq*2* M_PI));
//将向量force设置为设备待输出力
hdSetDoublev(HD_CURRENT_FORCE, force)
2.3 实验任务
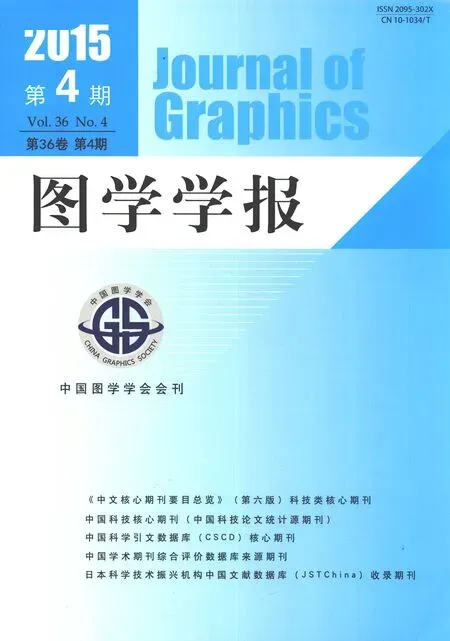
实验时的操作姿态取肘部为支撑的小臂及腕部活动(如图2)。受试者要完成一个简单但具有一定挑战的任务,即利用 Phantom设备操纵虚拟三维环境中的控制点沿路径从A点移动到B点(如图3(a)),路径长度等效到实际空间约为 80 mm,每次操作过程中手持端将会受到不同参数的振动影响。为使操作流程方便可行,每次进行绘制操作时受试者需要按住操纵笔上的按钮,按钮被按下时操作端产生振动,每完成一次“绘制”,程序将自动切换到下一组振动参数。

图2 操作姿态
程序的界面效果如图 3(b),在实验设计过程中,显示器提供的二维内容很难为用户提供深度感受,多数情况下用户会在绘制过程中偏离目标轨迹,考虑到提供3D显示的成本较高,本研究采用了增加场景绘制真实感的方法解决此问题。具体方法如下:①在虚拟环境中设置了一块倾斜的半透明面板,将路径置于面板表面,使用户较容易判断控制点是否穿过面板,同时倾斜的面板在透视关系下提高了场景的空间感;②添加光照和阴影效果来强化空间感,控制点的阴影被实时绘制在虚拟面板上,用户能够根据阴影位置判断控制点与面板的距离;③程序实时显示用户的操作轨迹作为参考。在实验中这些改进均获得了良好的效果反馈,受试者只需简单地引导便能较快熟悉虚拟的实验场景。
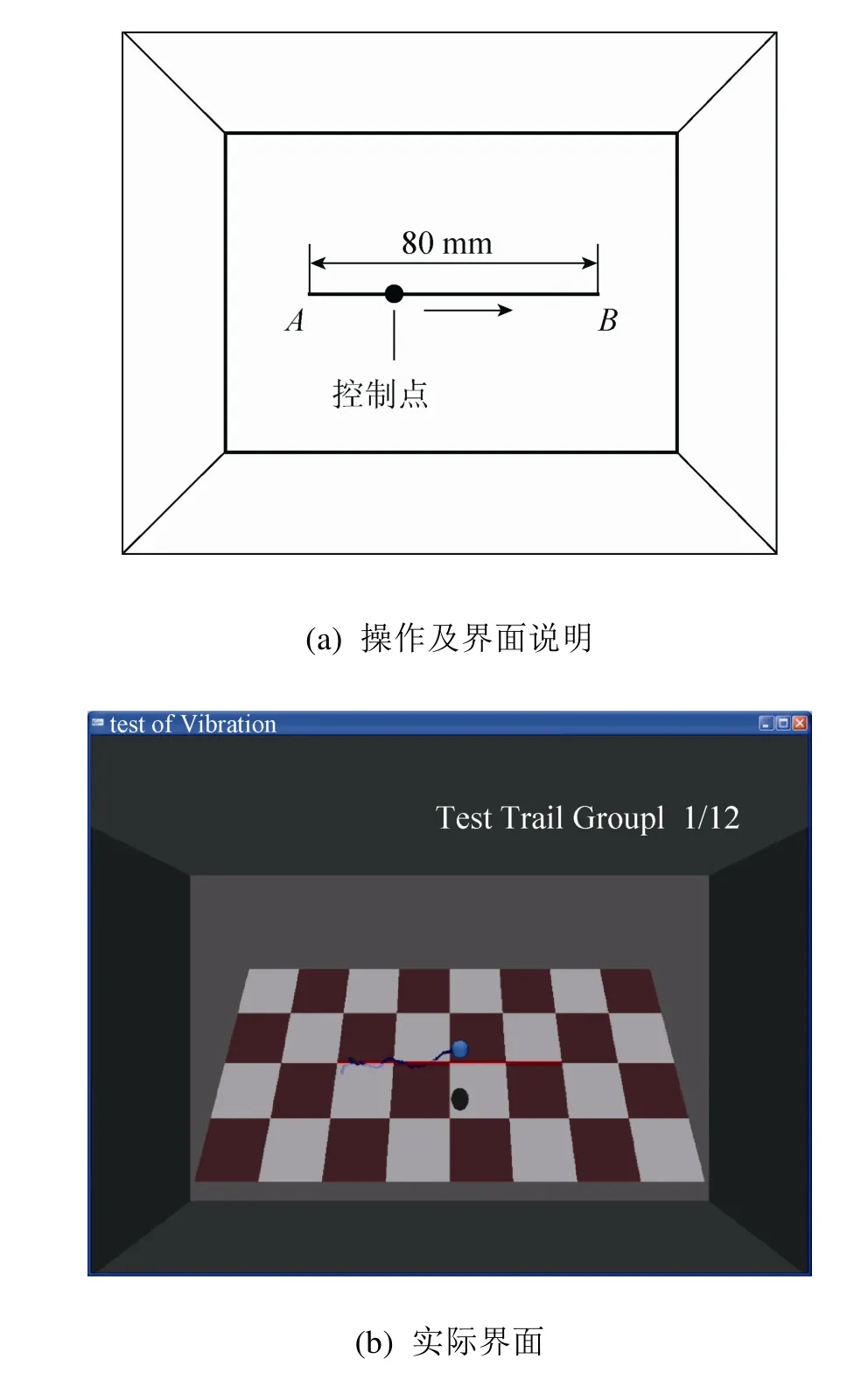
图3 程序界面
2.4 受试者
受试者共12名,其中男6名,女6名。受试者均为右利手,操作均使用右手。所有受试者未有使用实验设备的经验。
2.5 自变量
本实验中振动的主要参数包括 2.2节中讨论的简谐力幅值和振动频率,同时因为实验操作是在三维空间进行的,考虑到振动方向对结果的影响,故将其作为一个变量。
实验采用4因子全析因设计。表1列出了变量的等级设置,参数组合共计96种,每次实验分为 8组进行,每组之间设置短暂休息。在分组实验进行之前,每个受试者都将进行50次训练,训练时的参数设置随机产生。

表1 自变量设置
关于频率变量范围的确定,没有明确地研究说明频率对操作误差影响的差异,一般研究认为频率在30 Hz以下的振动对人体影响较为明显[1,4],同时兼顾设备特性,本研究将频率设置分为6级,为了能够测量更大的频率范围,变量取值从0.5 Hz开始按2倍规律递增。
经过预先测试,为了使测量误差在合理范围内,简谐力幅值被设置在0.2~0.8 N,分为4级。
对于振动方向的选择,需假设方向与运动方向垂直的振动对操作精度影响最大,振动方向被设置在与运动方向垂直的平面上,根据其与水平面的夹角分为4个等级(如图4)。
图4 程序界面与操作说明
2.6 因变量
实验测量的变量有采样轨迹相对于目标轨迹之间的误差和操作时间。程序对画线操作的三维
轨迹坐标以30 Hz的频率进行实时采样,受试者每次的操作数据都存储到单独的文件中,通过计算可以得到每次操作的平均误差和最大误差,通过记录受试者按下笔端按钮的时间即受试者的操作时间。
3 结果分析
将每名受试者的测量数据作为一组样本,考虑到操作时间可能会对操作结果造成影响,于是在12个样本中选取8个平均操作时间相近的样本(6~8 s)作为最终统计样本。
首先对每名受试者数据进行多因素方差分析,测试不同因子对操作平均误差的影响程度,因子包括幅值、频率和方向。结果表明,每名受试者每个因子对于平均误差均为 P<0.05,可以认为幅值、频率、方向均对操作平均误差有显著影响。下面分别分析每个因子对结果的影响。
3.1 频率与平均误差
图 5中每个折线图横坐标为频率,纵坐标为平均误差,每条折线上的节点代表一个样本的数据,将每个样本的节点连接成折线,可以找出频率对误差的影响规律。同时考虑振动方向和力幅值对结果的影响,将所有折线图按振动方向分为4组,每组折线图按幅值增大顺序从左至右排列。
综合全部折线图信息,可以发现振动频率对操作误差的影响呈非线性,频率在2 Hz附近时,平均误差变化有明显波动。在振动方向为 45°和90°的两组图中,振动频率在2 Hz附近时折线图呈明显峰值,并且随幅值增加,峰值升高。
3.2 幅值与平均误差
如图 6所示,以简谐力幅值为横坐标,平均误差为纵坐标绘制折线图。所有折线图按振动方向分为 4组,每组折线图按振动频率增大顺序从左至右排列。
综合图 6信息,每组均表现出误差随幅值增大而增大的趋势。纵向分组对比所有折线图,频率在1~4 Hz时,折线斜率增大,误差随幅值增大的影响较为显著。同时当振动方向为45°和90°时,上述影响最为显著。
3.3 方向与平均误差
如图7所示,以振动方向为横坐标(数字1、2、3、4分别代表0°、45°、90°、135°),平均误差为纵坐标绘制折线图。所有折线图排成4行6列,每行按振动频率增大顺序从左至右排列,每列按幅值增大顺序从上至下排列。
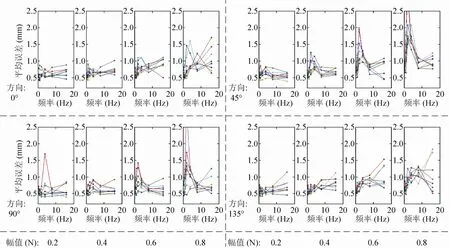
图5 频率与平均误差关系图
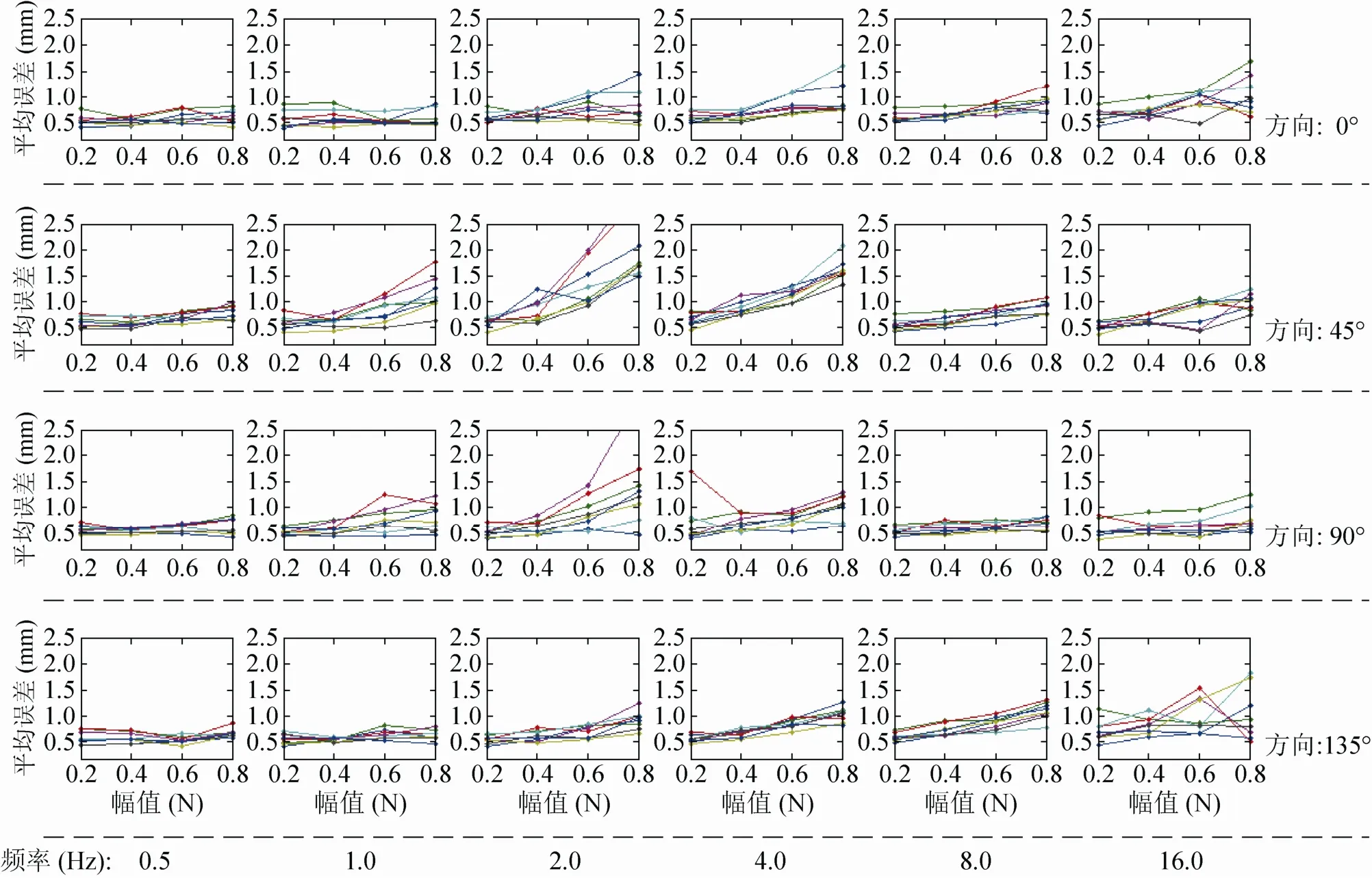
图6 幅值与平均误差关系图

图7 方向与平均误差关系图(方向1、2、3、4数字分别代表0°、45°、90°、135°)
综合图 7信息可见,平均误差的最大值多出现在振动方向为45°时,当简谐力幅值大于0.4 N时,方向2和4引起的平均误差大于方向1和3。
当振动频率为1~4 Hz时,方向2引起的误差明显大于其他振动方向,并且该差异随幅值增大而显著。
4 结论及展望
根据实验结果,在测量的变量范围内,可以得出以下结论:①振动频率对操作误差的影响呈非线性,手臂对频率约为2 Hz的振动最为敏感,该频段的振动引起的操作误差明显高于其他频段。②简谐力幅值对操作误差的影响近似线性,操作误差随幅值增大而增大,受振动频率影响。③振动方向对操作误差也有影响,振动方向为45°引起的操作误差高于其他振动方向。
有研究表明人类肢体受刺激后反应及运动时间和约为 0.5 s[7],可以认为人体对变化频率高于2 Hz的刺激变化已经不能做出及时的反应及相应运动。对于本实验,当振动频率高于2 Hz时,振动变化频率高于反应速度,操作者为了准确绘制直线只能稳定手部;当振动频率低于2 Hz时,上肢可以根据振动变化同时控制肌肉减少振动对操作的影响,而当频率恰好在2 Hz附近时,操作者不能正确地根据振动变化控制手部肌肉,导致振动误差较大。对于振动方向对误差的影响可以从操作姿势考虑,本实验规定的操作姿势是以肘部为支撑的手臂及手腕运动,手臂与桌面夹角约为30°到60°,方向为45°的振动引起的位移方向恰好约为手臂绕肘部关节圆周运动的切线方向,这也可以在一定程度上解释振动方向为 45°时操作误差较大的现象。
综上,在手部及手臂参与的实际操作中,为了提高操作精度,降低设备或环境振动引起的操作误差,应避免在振动频率接近于2 Hz时操作,同时设法降低设备振动力幅值,还应考虑振动方向与操作者操作姿态的关系,避免产生在手臂不易控制的方向上的振动,例如手及手臂绕关节圆周运动的切线方向。
本文提出了一种可用于研究手部操作受振动影响的方法,利用计算机程序及交互设备对操作进行仿真实验,而对于手传振动对操作精度影响的研究还较为初步,在参数设置及选择的考虑上还不够完善,同时在操作内容上,也仅以简单的直线路径追踪操作为例,没有进行相对复杂操作的实验,以上内容在今后的研究中还需要进一步考虑。另本文内容的研究还可以从数学模型描述的角度出发,寻找合理的模型描述方法,并利用本文数据进行验证。
[1] 朱 强, 秦泳元. 人体工程学与电动工具[J]. 电动工具, 2005, (2): 1-10.
[2] Gescheider G A, Bolanowski S J, Pope J V, et al. A four-channel analysis of the tactile sensitivity of the fingertip: frequency selectivity, spatial summation and temporal summation [J]. Somatosensory and Motor Research, 2002, 19(2): 114-124.
[3] Hatzfeld C, Kern T A, Werthschützky R. Design and evaluation of a measuring system for human force perception parameters [J]. Sensors and Actuators A, 2010, 162: 202-209.
[4] 吴国良. 局部振动对人体的危害及其控制方法[J]. 噪声与振动控制, 1990, (4): 13-18.
[5] 张志飞, 徐中明, 贺岩松. 人体手传振动评价研究[J].人体工效学, 2011, 17(2): 59-62.
[6] 中华人民共和国国家质量监督检验检疫总局. GB/T 14790.1-2009 机械振动人体暴露于手传振动的测量与评价第 1部分: 一般要求[S]. 北京: 中国标准出版社, 2009.
[7] 杨舒永, 杨博民, 韩 昭. 不同肢体的反应时间和运动时间[J]. 心理学报, 1986, (1): 1-7.
Operation Simulation and Preliminary Research on Control Accuracy of Hand Operation Affected by Vibration
Wang Dongyang, Yang Guang
(School of Mechanical Engineering & Automation, Beihang University, Beijing 100191, China)
In operations controlled by hands and arms, vibration transmitted from controller to hand and arm would have an impact on the accuracy of operation. The effects of vibrations are investigated with different parameters on operation accuracy, with the help of a program to simulate a path tracing operation in virtual space. A programmable haptic device is used as the controller. Vibration frequency has a nonlinear effect on operation errors, and significant effects occur in the vicinity of 2 Hz. Vibration amplitude has an approximate linear effect on operation errors, and operation errors can also be affected by vibration direction.
man-machine engineering; interactive simulation; operation accuracy; hand-transmitted vibration
TB 18; TP 391.9
A
2095-302X(2015)04-0644-06
2014-09-29;定稿日期:2015-01-23
王冬阳(1990–),男,河北省承德人,硕士研究生。主要研究方向为计算机图形学。E-mail:510012223@qq.com
杨 光(1963–),女,北京人,副教授,博士。研究方向为计算机图形学,计算机辅助几何设计。E-mail:yg_id@buaa.edu.cn
猜你喜欢
中国心血管杂志(2022年2期)2022-11-25 17:29:20
中国心血管杂志(2022年4期)2022-11-25 16:59:06
大气与环境光学学报(2021年4期)2021-08-10 03:57:50
中国心血管杂志(2021年6期)2021-01-02 08:18:16
中国心血管杂志(2019年3期)2019-01-04 16:25:09
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:37:53
电脑爱好者(2018年2期)2018-01-31 19:07:26
电子制作(2017年7期)2017-06-05 09:36:13
电脑爱好者(2017年1期)2017-04-14 10:16:22
电测与仪表(2016年15期)2016-04-12 00:30:52