
基于模糊自整定PID 的爆胎车辆轨迹控制
2015-11-30 11:45:59于树友顾雪来
吉林大学学报(信息科学版) 2015年4期
刘 洋,于树友,顾雪来,陈 虹
(1.吉林大学通信工程学院,长春130022;2.中国北车集团大连机车车辆有限公司客户服务中心,辽宁大连116022)
基于模糊自整定PID 的爆胎车辆轨迹控制
刘 洋1,于树友1,顾雪来2,陈 虹1
(1.吉林大学通信工程学院,长春130022;2.中国北车集团大连机车车辆有限公司客户服务中心,辽宁大连116022)
为解决高速公路爆胎车辆出现偏航的问题,借助veDYNA软件进行了的仿真研究。在确定了爆胎车辆轨迹控制的评价指标后,采用模糊PID(Proportion Integral Differential)控制器,规划了爆胎后车辆的方向盘转角,代替驾驶员对爆胎车辆进行方向控制。该方法结合模糊控制和传统PID控制的优点,针对车辆爆胎的复杂环境,自动整定PID控制参数,适应爆胎车辆的参数变化。仿真结果表明:基于模糊自整定PID的爆胎车辆轨迹控制可在保证车辆稳定行驶的同时控制车辆的行驶轨迹,使其在出现较小偏移后回到原路径,具有较好的适应性。
爆胎;模糊算法;自整定PID控制器;轨迹控制
0 引 言
美国汽车工程师协会的调查表明:美国每年有26万起交通事故是由于轮胎胎压不足引起的[1]。在国内高速公路上发生的交通事故总数量中约有70%是由于爆胎引起的,如果车辆行驶速度高于120 km/h时爆胎,则车内人员的死亡率接近100%[2]。由此可见,由汽车爆胎引发的交通事故在总交通事故数量中占有很大的比重。减少由汽车爆胎引发的事故对保证人身安全、减少国家及个人的财产的损失具有实际意义。
轮胎爆裂后,轮胎参数变化是影响轮胎性能的重要因素之一,会直接诱发轮胎径向和切向力学特性发生巨大变化,最后导致整车动力学性能发生变化。胎面分离是爆胎的一个重要表现形式,文献[3-5]对此进行了研究。在实际车辆上推广应用的轮胎主动安全技术,通常是通过监测轮胎压力,对是否爆胎进行监测。具有代表性的是轮胎压力监测系统TPMS(Tire Pressure Monitoring System)。爆胎监测的另外一种方法是通过建立观测器估计车辆当前的运行状态[6],利用观测器的值与实际测量值得出的残差信息发出爆胎报警。然而这些检测方法只能起到预防作用,并不能从根本上解决爆胎车辆的安全问题。因此,文献[7-9]对爆胎车辆的行驶状态进行控制干预,以抑制爆胎车辆偏航和提高车辆的稳定性。现在国内的研究多是在汽车稳定性控制系统(ESP:Electronic Stability Program)上开发一种爆胎汽车稳定性控制子系统。文献[10]根据爆胎车辆的特性建模后,结合ESP对爆胎车辆的主动控制策略进行了研究。文献[11]提出差动制动的方法,通过调整车辆的横摆运动使爆胎车辆避免偏航并保证车辆的操纵稳定性。文献[12]针对爆胎车辆的稳定性控制设计了二次型调节器,对最佳横摆力矩进行规划。这些文献都采用理想二自由度车辆模型设计控制器,由于在实际爆胎制动过程中,车速是变化的且车轮的纵向力不能忽略,其搭建的理想二自由度模型与实际情况差异较大,不能准确描述爆胎工况[13]。
PID(Proportion Integral Differential)控制器因为其结构简单、可靠性高等优点在控制领域被广泛应用。然而,工程实际中的被控对象机理复杂,常伴有纯滞后、非线性和不确定性等特点,其过程参数会随工况条件的变化而变化[14]。因此,随着智能控制在理论和应用方面的快速发展,不断涌现了将智能控制方法与PID融合的新方法[15,16]。
笔者针对常规PID控制不具有自适应能力,对于时变、非线性系统控制效果不佳等问题,将模糊技术与PID控制相结合,建立模糊PID控制器,对爆胎车辆的轨迹进行控制。模糊PID控制器既具备常规PID结构简单、容易实现和可靠性高等优点,又具备自适应能力,能自动整定控制参数,以适应被控对象参数的变化。仿真结果表明,模糊PID控制器能很好地纠正爆胎车辆的偏移,保持车辆的稳定。
1 控制方法和控制任务的确立
PID控制器将系统偏差按照比例、积分、微分的运算关系,线性组合得出输出量用作控制。对比例系数Kp、积分系数Ki和微分系数Kd的整定是PID控制系统设计的主要内容。常规PID控制器只利用一组固定不变的参数进行控制,往往无法兼顾系统的动态性能和静态性能之间的矛盾,并且不能适应系统参数的变化。当系统参数变化范围太大时,系统性能会明显变差。由于高速公路上的汽车行驶速度在60~120 km/h之间,不同的行驶车速、路径曲率、路面附着系数等都会影响PID控制参数。因此,针对高速公路爆胎车辆的轨迹控制,笔者拟设计可以实时改变控制参数的智能PID控制器,以适应不同爆胎车速和爆胎道路环境的变化(见图1)。当被控对象参数变化时,通过在线调整控制器参数,使系统获得满意的控制效果,此时整个控制部分可看作一个可变增益的PID控制器。
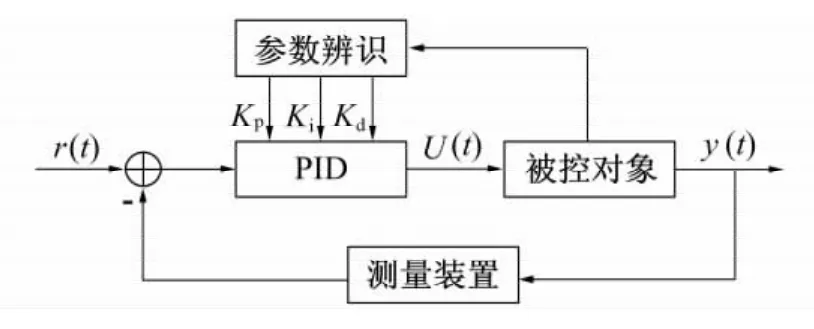
图1 智能PID控制原理图Fig.1 The control principle figure of intelligent PID
1.1 模糊控制原理
现代控制系统由于被控对象的复杂化,常常具有多输入、多输出的强耦合特性、参数时变和非线性特性。在实际生产过程中,即使操作人员不能掌握被控对象的数学模型,也能根据系统偏差等信息,凭借经验采取相应的控制决策。于是,将人工经验的自然语言转化为计算机算法语言的模糊控制获得了广泛研究和应用。模糊控制器由模糊数据和规则库、模糊器、模糊推理机和解模糊器组成[17](见图2)。

图2 模糊控制系统框图Fig.2 The block diagram of fuzzy control system
模糊控制过程分为模糊化、模糊逻辑推理和解模糊判断3个步骤。通常把误差及其变化率作为模糊控制器的输入变量,体现了模糊控制本质上是一种非线性比例微分控制。误差e、误差变化率ec和输出y的实际变化范围,称为模糊控制的基本论域。首先,为实施模糊控制,需要对输入变量e、ec在基本论域内的实际值转化为语言变量值,即模糊化;然后,输入语言变量值经模糊逻辑推理,得到输出语言变量值。模糊推理的关键是确定模糊控制规则表,此表是根据专家或操作者的手动控制经验总结出若干条“if-then”模糊控制规则的集合;最后,模糊推理的结果一般情况下是一个模糊集,不能直接用于控制,还需要对输出语言变量值进行解模糊化计算,将其转化为输出变量基本论域内的一个精确值输出。
1.2 爆胎车辆运动状态分析
研究表明,轮胎在零胎压下,滚动阻力系数增大到正常胎压下的20多倍,径向刚度、侧偏刚度、纵滑刚度与侧倾刚度分别降低为正常值的6.7%,25%,28%和66%[18]。轮胎这些力学特性的变化对爆胎车辆的操纵稳定性和运行状态有很大影响。为了直观说明爆胎时轮胎性能的改变对车辆运行状态的影响,给出汽车左前轮爆胎后不施加任何控制措施时的响应。在veDYNA仿真软件中设定的仿真工况为汽车在附着系数为0.8的直道上行驶,爆胎发生在系统运行25 s时,爆胎时车辆的行驶速度为60 km/h,仿真结果如图3~图6所示。
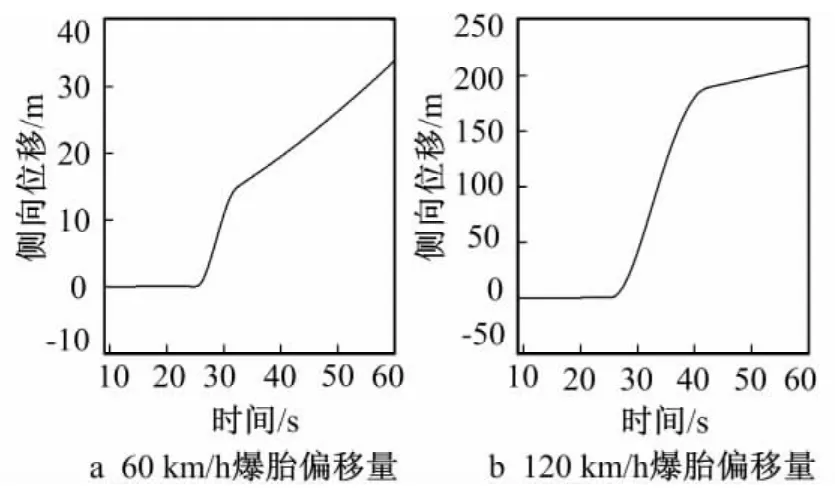
图3 爆胎车辆的侧向位移Fig.3 The lateral offset of the vehicle with blownout tire
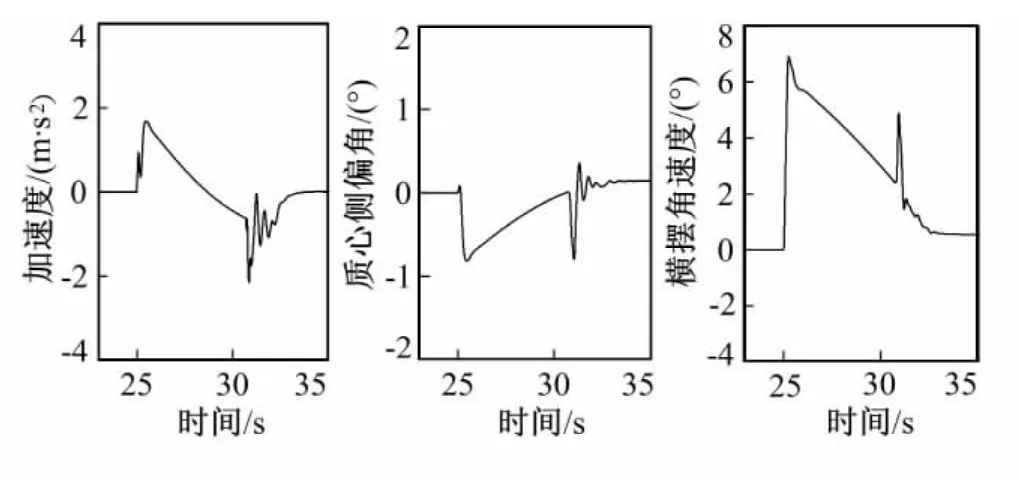
图4 爆胎车辆的运行状态Fig.4 The running states of the vehicle with blownout tire

图5 爆胎车辆的侧偏角 Fig.5 The tire slip angle of the vehicle with blownout tire

图6 爆胎车辆的行驶速度Fig.6 The velocity of the vehicle with blownout tire
仿真结果表明,在不施加任何控制措施的情况下,爆胎车辆可依靠滚动阻力自动减速,但侧向位移偏移量足以让车辆驶入相邻车道或撞击护栏,并且爆胎车辆的横摆角速度在爆胎后的1 s内达到正向的最大值;车辆的质心侧偏角和4个车轮的侧偏角的大小变化不大,爆胎轮胎没有同轮辋分离,没有翻车的危险。爆胎车辆最大的危险来自车身剧烈的偏航。在相同工况不同爆胎车速下,爆胎车辆各性能指标变化趋势大体相同,但更高的爆胎车速会使这些性能指标的幅值变大。当爆胎车速为120 km/h,爆胎车辆会发生更大的偏航(见图3b);其余性能指标的幅度均增加了2~3倍,质心侧偏角达到了5倍。这说明爆胎车速越高,车辆的行驶稳定性越差,更易出现危险。
1.3 确立控制任务
笔者采用文献[19]提出的爆胎车辆安全行驶评价指标作为笔者提出的PID参数调整依据:
1)质心侧偏角大于3°时,因驾驶员很难操纵车辆,此时认为车辆是不稳定的;
2)爆胎轮胎的侧偏角大于4°时将与轮辋分离,造成轮辋触地,此时视为翻车;
3)横摆角速度出现较大的正负近似阶跃变化时,车辆出现甩尾;
4)爆胎车辆可以发生轻微偏航,但不能驶入别的车道,或者撞击护栏。
通过以上分析,指标1)~3)可视为表征爆胎车辆稳定行驶的性能指标。笔者控制任务是在满足爆胎车辆行驶稳定的约束下尽可能使爆胎车辆跟随道路中心线。
2 控制系统设计
2.1 爆胎车辆安全控制系统
笔者设计的爆胎车辆安全控制系统的整体框图如图7所示。爆胎车辆在不施加任何控制措施的情况下,由于巨大的惯性作用,质心侧偏角和车轮侧偏角变化不大,爆胎车辆不会立即失稳。然而,在现场爆胎环境的严重干扰下,如果驾驶员错误地判断当前车辆运动趋势而采取了过度制动或转向等错误操作,将直接导致车辆失去稳定性,甚至翻车。因此,为了防止驾驶员对爆胎车辆的不恰当操作,一旦车辆监测到爆胎的发生,笔者设计的爆胎车辆安全控制系统会立即被触发工作,替代驾驶员接管对车辆的控制。具体控制过程如下:速度控制子系统将车辆的油门踏板和制动踏板信号置零,使爆胎车辆依靠地面滚动阻力减速;同时,方向控制子系统依据爆胎车辆的实际路径与期望路径之间的偏差及其变化率规划方向盘转角输出给车辆的转向系统。

图7 基于模糊PID控制的爆胎车辆安全控制系统框图Fig.7 The safety control system of the vehicle with blownout tire based on Fuzzy PID control
图7 中的方向控制子系统利用模糊控制机制对PID参数进行在线调整,即采用模糊自整定PID控制器。模糊自整定PID控制器由两部分组成,分别是常规PID控制器和模糊推理的参数校正。PID控制器根据闭环误差产生控制信号。模糊推理部分调节PID控制器的参数,其算法过程为首先将在采样时刻的控制指标对应规则库进行模糊化(以误差e和误差变化率ec作为模糊推理的输入),然后与规则库中的模糊规则进行匹配,确定PID控制器三参数的调整方向和大小,执行被匹配规则的结果就可得到相应的控制参数(以PID参数Kp、Ki、Kd作为模糊推理的输出)。在veDYNA仿真环境中的方向控制子系统结构框图如图8所示。
2.2 模糊PID控制器的设计
首先利用常规PID控制方法整定不同爆胎速度下的合适的控制参数。通过实验观察确定出控制参数的大致范围,即模糊集上的基本论域。由于高速公路的行车环境十分复杂,包括不停变化的路面弯曲程度、路面附着系数等,车辆在直路上爆胎和在弯道上爆胎是两种不同的工况,为了使控制器在多工况条件下具有很好的控制效果,需要在直路和弯路工况下分别标定控制参数,结果如表1和表2所示。

图8 爆胎车辆方向控制子系统结构图Fig.8 The direction control subsystem of the vehicle with blownout tire

表1 直路工况下不同爆胎车速的控制参数Tab.1 The control parameters of the different vehicle speed under the straight road working condition

表2 弯路工况下不同爆胎车速的控制参数Tab.2 The control parameters of the different vehicle speed under the curve road working condition
设E、Ec、KP、KI、KD为e、ec、Kp、Ki、Kd的模糊语言变量,依据上表可以初步确定各模糊语言变量在直路和弯路两种道路环境下的模糊论域,分别如表3和表4所示。

表3 各模糊语言变量在直路环境下的模糊论域Tab.3 The fuzzy domain of each language variable under the straight road working condition
将各参数基本论域范围内连续变化的量分级离散化,进行模糊处理。笔者将模糊论域量化为7个等级,设定语言值集合为{NB,NM,NS,ZO,PS,PM,PB},分别代表{负大,负中,负小,零,正小,正中,正大},这种划分可以得到较高的控制品质。从表3和表4可以看出,各模糊语言变量在直路和弯路两种道路环境下的模糊论域有一定差别,为了方便离散和量化,针对直路和弯路两种不同的爆胎环境,笔者分别设计了直路模糊PID控制器和弯路模糊PID控制器,根据爆胎道路的曲率在线切换,以保证控制器在不同道路下都具有很好的控制效果。本文中所有模糊子集均采用灵敏度高并且能使控制具有较高分辨率的三角形隶属函数。
设计模糊自整定PID参数控制器的目的就是能使控制参数Kp、Ki、Kd随着误差e和误差变化率ec的变化而自动调整,因此应该先明确它们之间的关系。笔者设计的模糊自整定PID控制器的参数自调整要满足如下调整原则:
1)当误差较大时,为了使系统的响应速度变快,同时减小由误差突然变大引发的过饱和、微分控制作用超过预期范围的可能性,应该使用较小的Kd和较大的Kp,此时Ki通常取零;
2)当误差与误差的变化率处于中等大小时,为了达到快速响应同时减小超调的效果,应该酌情适当选取Ki的值,同时取小一点的Kd,以减小其对控制系统的影响,为降低超调应该选取较小的Kp;
3)当误差较小时,为使系统具有更好的稳态性能,应增大Kp和Ki的值。适当的选取Kd的值,以增加系统抗干扰能力,使输出响应避免在期望值附近震荡。通常情况下,当误差变化率较大时,取较小的Kd;当误差变化率较小时,取较大的Kd。
根据以上总结的调整原则,模糊自整定PID控制器的参数自调整要满足的模糊规则共有49条,如表5所示。

表5 PID控制参数模糊规则表Tab.5 The fuzzy rules of the PID control parameters
模糊控制器采用Mamdani的极小-极大运算方式生成模糊关系,采用控制系统中应用比较广泛的重心法解模糊化。在输入误差、误差变化量的基本论域转化到相应模糊集的论域时,中间需要量化因子。同时,从模糊控制算法求得的输出量转到输出基本论域也需乘以一比例因子。输入量化因子及输出比例因子对系统的动、静态性能影响很大,要合理选取。本文中默认模糊PID控制器的量化因子和比例因子都为1。
3 仿真结果
3.1 高附着系数路面直线路况
将模糊自整定PID控制器用于爆胎车辆轨迹控制实验仿真,首先采用直线路况进行试验:车辆在附着系数为0.8的均匀直路上行驶,在系统运行25 s时车辆左前轮发生爆胎,在25 s前车辆达到预期速度并保持匀速行驶。爆胎车速分别为 80 km/h,100 km/h和 120 km/h,仿真结果如图 9~图14所示。

图9 爆胎车辆的侧向位移Fig.9 The lateral offset of the vehicle with blownout tire

图10 爆胎车辆的侧向加速度Fig.10 The lateral acceleration of the vehicle with blownout tire
从图9看出,不同爆胎车速下的车辆偏航幅度很小,均在允许范围内,且最终跟随上道路中心线,同时,可以观察到随着爆胎车速的增加,侧向位移上升段的抖动不可避免。图10~图13表明,表征车辆是否稳定行驶的各指标的变化幅度同样很小,在安全行驶指标范围内,爆胎车辆没有侧翻和轮辋触地的危险;但随着爆胎车速增加,各性能指标在达到稳定前幅度和震荡次数均增加,调节时间变长。图14中,爆胎车速增加时PID控制器决策出的方向盘转角在幅值和频率上均有所提高。这说明相对于低速爆胎,高速爆胎车辆的操纵稳定性更差且更难趋于稳定。
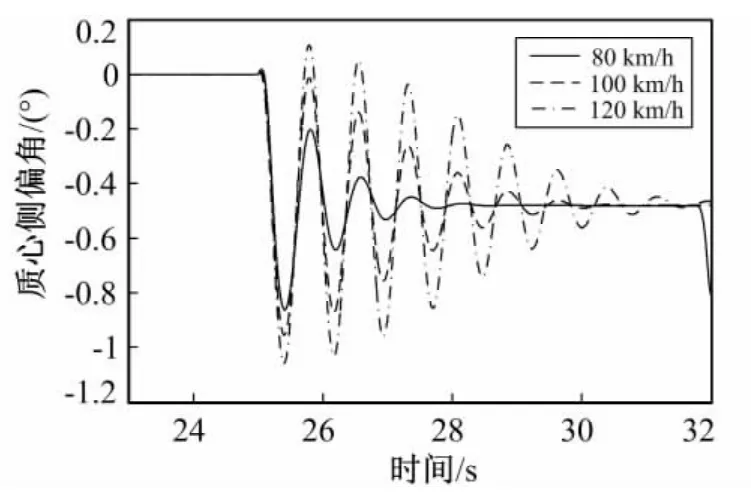
图11 爆胎车辆的质心侧偏角Fig.11 The side slip angle of the vehicle with blownout tire

图12 爆胎车辆的横摆角速度Fig.12 The yaw rate of the vehicle with blownout tire

图13 爆胎车辆左前轮的侧偏角Fig.13 The front left tire slip angle of the vehicle with blownout tire
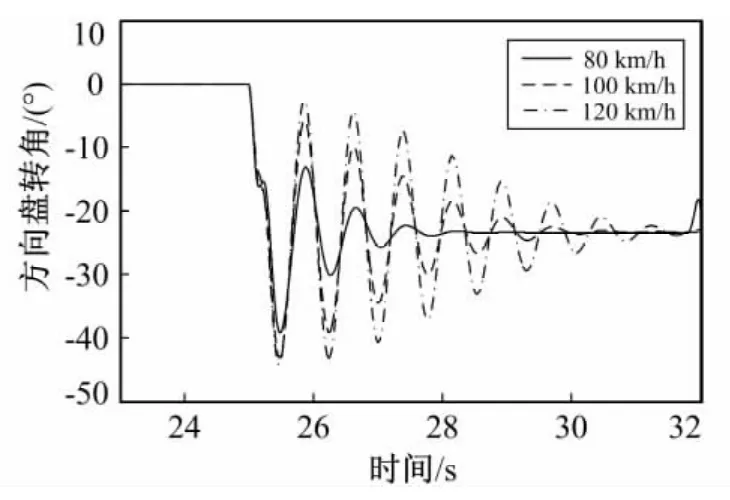
图14 爆胎车辆的方向盘转角Fig.14 The steer angle of the vehicle with blownout tire
3.2 高附着系数路面曲线路况
高速公路的行车环境十分复杂,为了能更好地验证基于模糊PID控制方案对爆胎车辆轨迹控制效果,笔者在veDYNA中设计了符合高速公路国家标准的曲线路段进行仿真验证。试验路段分为直路与曲线路段两部分,其目的是为了使汽车能以一定的速度在曲线路段上爆胎。设计实验道路时需要考虑直路长度,以保证试验车辆可在直路加速至理想速度。实验路径和行驶工况的具体参数为:直路与弯路的附着系数均为0.8,其中直路长度为200 m,曲线路段的弧度为90°,左弯;左前轮爆胎,爆胎时刻为25 s,爆胎时刻车速分别为100 km/h,120 km/h。仿真结果如图15~图22所示。

图15 爆胎车速为100 km/h时的车辆行驶XY平面图Fig.15 The XY plot of the vehicle trajectory(100 km/h)
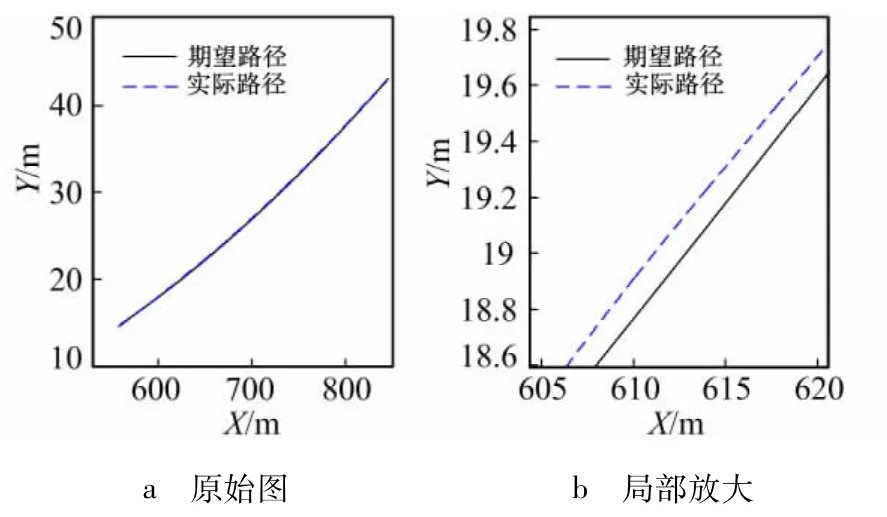
图16 爆胎车速为120 km/h时的 车辆行驶XY平面图Fig.16 The XY plotof the vehicle trajectory(120 km/h)
从图15、图16以及其各自的放大图可以观察到期望路径和实际路径的偏差很小,侧向位移控制精度很高。从图18可以看出,在整个爆胎过程中车辆的横摆角速度未出现较大的正负近似阶跃变化,爆胎车速100 km/h时,车身反复震荡2 s;更高爆胎车速时震荡时间加长,最多7 s。图19表明,爆胎车辆质心侧偏角在3°以内,是质心侧偏角的线性区,由此判定车辆爆胎后行驶稳定。图20显示,爆胎后控制器所控制的方向盘的转角没有突然变大,说明整个控制过程较合理,能保证车辆安全行驶。在控制器规划的方向盘转角没有发生激转的情况下,图21所示的车辆轮胎侧偏角也在安全评价指标内,可保证车辆在转向时轮胎和轮辋不会分离。图22说明爆胎车辆能够依靠滚动阻力平稳降速。

图17 爆胎车辆的侧向加速度 Fig.17 The lateral acceleration of the vehicle
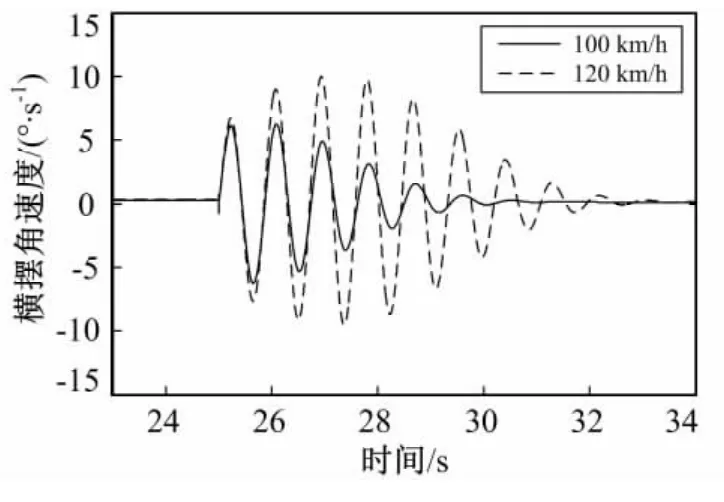
图18 爆胎车辆的横摆角速度Fig.18 The yaw rate of the vehicle
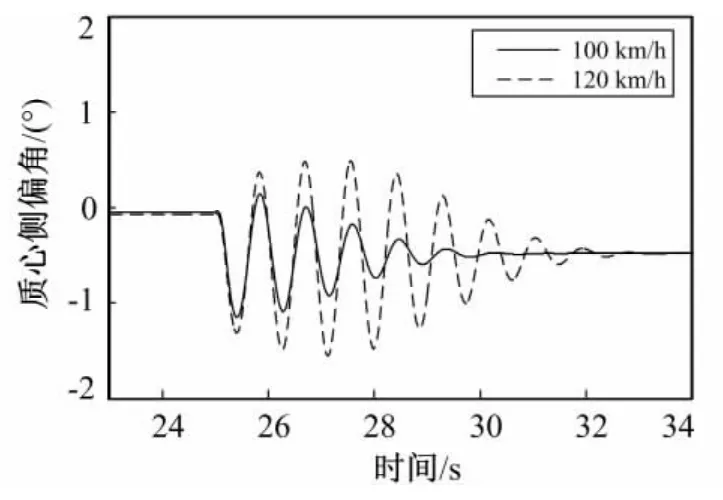
图19 爆胎车辆的质心侧偏角Fig.19 The side slip angle of the vehicle

图20 爆胎车辆的方向盘转角Fig.20 The steer angle of the vehicle

图21 爆胎车辆的左前轮侧偏角Fig.21 The front left tire slip angle of the vehicle
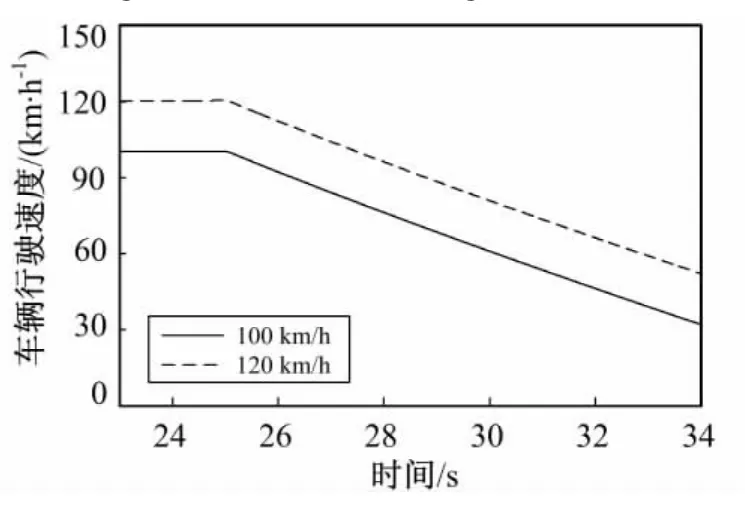
图22 爆胎车辆的纵向车速Fig.22 The longitudinal speed of the vehicle
综上,模糊PID控制器对高速公路爆胎车辆轨迹能取得良好控制,车辆的各项安全指标均在可以接受的范围内,并且所设计的模糊PID控制器不仅适用于直路爆胎,同样也适用于弯路爆胎。
4 结 语
爆胎后车辆的轮胎力学特性发生改变,进而影响了车辆行驶的稳定性和行驶轨迹。笔者结合了模糊控制和传统PID控制的优点,针对当爆胎车速、爆胎路径曲率等参数变化时,常规PID控制器控制效果不佳的缺点,设计了基于模糊自整定PID的高速公路爆胎车辆轨迹安全控制系统。仿真结果表明,以不同行驶车速分别在直路和弯路爆胎的多种工况下,模糊自整定PID控制器都能使车辆在稳定行驶的同时控制车辆的行驶轨迹,使其在出现较小的偏移后回到原路径。并且此控制器具有自适应能力,能适应较大范围的参数变化。
[1]臧怀泉,田超,赵保军.嵌入式汽车轮胎气压监测系统设计[J].北京理工大学学报,2008,28(10):870-874. ZANG Huaiquan,TIAN Chao,ZHAO Baojun.Design of Tire Pressure Monitoring System Based on Embedded OperatingSystem[J].Transactions of Beijing Institute of Technology,2008,28(10):870-874.
[2]张放.汽车爆胎的原因及应对措施问题研究[J].汽车实用技术,2013(10):101-104. ZHANG Fang.Flat Tire Causes and Countermeasures Issues[J].Automobile Applied Technology,2013(10):101-104.
[3]ARNDTM W,ROSENFIELD M J,ARNDT SM,et al.Force Response during Tire Tread Detachment Event[J].Society of Automotive Engineers Transactions,2004,113(6):684-691.
[4]ARNDTM W,ROSENFIELD M J,ARNDT SM.Measurement of Changes to Vehicle Handling Due to Tread-Separation-Induced Axle Tramp[C]∥SAE International Congress and Exposition.[S.l.]:SAE,2006:1680-1696.
[5]DICKERSON C P,ARNDT M W,ARNDT SM.Vehicle Handling with Tire Tread Separation[J].Society of Automotive Engineers Transactions,1999,108(6):421-442.
[6]TAKAJIUMENO.Observer Based Estimation of Parameter Variations and Its Application to Tyre Pressure Diagnosis[J]. Control Engineering Practice,2001,9(6):639-645.
[7]PATWARDHAN S,PATWARDHAN,TOMIZUKA M,et al.Theory and Experiments of Tire Blow-out Effects and Hazard Reduction Control for Automated Vehicle Lateral Control System[C]∥Proceedings of the American Control Conference. Baltimore:IEEE,1994:1207-1209.
[8]PATWARDHAN S,TAN H S,TOMIZUKA M.Experimental Results of a Tire-Burst Controller for AHS[J].Control Eng Practice,1997,5(11):1615-1622.
[9]ZBIGNIEW LOZIA.Simulation Tests of Biaxial Vehicle Motion after a“Tire Blow-Out”[C]∥SAE International Congress and Exposition Technical Papers.Michigan:Michigan University Press,2005:56-59.
[10]郑宏宇,宗长富,刘海贞.汽车爆胎特性建模与主动制动控制策略[J].中国公路学报,2012,25(4):147-152. ZHENG Hongyu,ZONG Changfu,LIU Haizhen.Tire Blow-out Modeling and Active Braking Control Algorithm of Vehicle[J].China Journal of Highway and Transport,2012,25(4):147-152.
[11]黄江,郭孔辉,宋晓琳,等.爆胎汽车的稳定性控制[J].中国机械工程,2009,20(16):2006-2010. HUANG Jiang,GUO Konghui,SONG Xiaolin,et al.Vehicle Stability Control Method after Tire Blow-out[J].China Mechanical Engineering,2009,20(16):2006-2010.
[12]丁海涛,郭孔辉,陈虹.汽车稳定性控制中横摆力矩决策的LQR方法[J].吉林大学学报:工学版,2010,40(3): 597-601. DING Haitao,GUO Konghui,CHEN Hong.LQR Method for Vehicle Yaw Moment Decision in Vehicle Stability Control[J]. Journal of Jilin University:Engineering and Technology Edition,2010,40(3):597-601.
[13]秦涛.汽车爆胎时主动制动控制策略的研究[D].哈尔滨:哈尔滨工业大学航天学院,2013. QIN Tao.Research on Active Braking Control Strategy of Vehicle with Tire Blow-out[D].Harbin:School of Astronautics,Harbin Institute of Technology,2013.
[14]李渊.智能PID控制器优化仿真研究[J].计算机仿真,2012,29(12):180-183. LIYuan.Parameters Optimization of PID Controller[J].Computer Simulation,2012,29(12):180-183.
[15]高原,刘奇芳,卢晓晖,等.车辆起步过程神经网络PID控制研究[J].吉林大学学报:信息科学版,2013,31(4): 389-396. GAO Yuan,LIU Qifang,LU Xiaohui,etal.Research on Launch Control Strategy for AMT Vehicles Based on Neural Network PID[J].Journal of Jilin University:Information Science Edition,2013,31(4):389-396.
[16]贾鹤鸣,柳泽铭,张金阳.基于滑模PID的微型旋翼飞行器轨迹跟踪控制[J].吉林大学学报:信息科学版,2014,32(4):383-388. JIA Heming,LIU Zeming,ZHANG Jinyang.Trajectory Tracking Control of Rotating Wing Micro Aerial Vehicle Based on Sliding Mode PID[J].Journal of Jilin University:Information Science Edition,2014,32(4):383-388.
[17]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166-172. WANG Shuyan,SHIYu,FENG Zhongxu.A Method for Controlling a Loading System Based on a Fuzzy PID Controller[J]. Mechanical Science and Technology for Aerospace Engineering,2011,30(1):166-172.
[18]王英麟.基于CarSim与UniTire的爆胎汽车动力学响应研究[D].长春:吉林大学汽车工程学院,,2007. WANG Yinglin.Study on Vehicle Dynamic Response to Tire Blow-out Based on CarSim and Unitire[D].Changchun:College of Automotive Engineering,Jilin University,2007.
[19]郭大鹏.爆胎车辆轨迹控制[D].长春:吉林大学通信工程学院,2011. GUO Dapeng.Flat Tire Vehicle Trajectory Control[D].Changchun:College of Communication Engineering,Jilin University,2011.
(责任编辑:张洁)
Trajectory Control of Vehicles with Blowout Tire on Expressway Based on Fuzzy PID Algorithm
LIU Yang1,YU Shuyou1,GU Xuelai2,CHEN Hong1
(1.College of Communication Engineering,Jilin University,Changchun 130022,China;2.Customer Service Center,Dalian Locomotive and Rolling Stock Corporation Limited,China Northern Locomotive and Rolling Stock Industry Group,Dalian 116022,China)
A simulation research is carried out with the veDYNA software for the yawing motion of the vehicle during a tire blowout on the expressway.Firstly,the evaluation criteria ofmotion vehicles during a tire blowout are determined.Then,in order to replace the driver to control the direction of the vehicle,a fuzzy PID (Proportion,Integral,Differential)controller is adopted to plan the steering wheel angel of the vehicle with a blowout tire.This control scheme combines the advantages of fuzzy control method with the advantages of traditional PID control method.It can adjust the PID control parameters for different working conditions and complex road environments,to adapt to the changes in parameters of the vehicle during a tire blowout.The simulation shows that the trajectory control of vehicles with blowout tire based on the fuzzy PID can make the vehicle avoid yawing,the vehicle can be driven back to the original path after a small offset.It proves that this control scheme has a better adaptive ability.
tire blowout;fuzzy algorithm;self-tuning proportion integral differential(PID)controller;trajectory control
TP273
A
1671-5896(2015)04-0380-09
2014-12-19
国家自然科学基金资助项目(61034001);吉林大学“973课题”基金资助项目(2012CB821202)
刘洋(1991— ),女,吉林榆树人,吉林大学硕士研究生,主要从事预测控制及机器人轨迹跟踪研究,(Tel)86-13504409407(E-mail)liuyang9407@126.com.cn;于树友(1974— ),男,长春人,吉林大学副教授,博士,硕士生导师,主要从事预测控制及车辆稳定性控制研究,(Tel)86-13504409392(E-mail)shuyou@jlu.edu.cn。
猜你喜欢
思维与智慧·上半月(2023年6期)2023-05-19 11:10:55
思维与智慧(2023年16期)2023-05-19 07:24:38
飞控与探测(2022年6期)2022-03-20 02:16:14
今日农业(2021年8期)2021-11-28 05:07:50
诗潮(2020年10期)2020-12-06 10:44:40
力学学报(2020年4期)2020-08-11 02:32:12
下一代英才(酷炫少年)(2017年3期)2017-06-15 13:00:04
黑龙江电力(2017年1期)2017-05-17 04:25:08
财经国家周刊(2017年1期)2017-01-23 21:05:28
公民与法治(2016年20期)2016-05-17 04:18:56
