机器人远程手术研究状况与展望
2015-11-30 08:11:13徐武夷卢旺盛
转化医学杂志 2015年2期
徐武夷,杨 文,卢旺盛
·综 述·
机器人远程手术研究状况与展望
徐武夷,杨 文,卢旺盛
机器人远程手术是通过远程医学信息平台双向实时传输与交互方式控制由机器人完成的手术,目前已逐步应用于临床。作者就远程手术的发展与应用情况和一些典型的远程手术机器人进行评述,并对其面临的挑战、发展前景进行展望。
远程手术;机器人;医疗机器人
长久以来,医生和患者在同一现场是进行诊断与实施手术的先决条件,正因如此许多地区由于交通不便,患者不能及时得到治疗而失去了最佳的治疗机会。在战场上受伤的战士由于抢救不及时导致死亡的更是数不胜数。这些痛苦的经历和血的教训使人们在积极寻求补救措施,随之产生了远程手术的构想[1-2],随着机器人技术和医疗技术的不断发展,远程手术也随之不断推进和完善。
远程手术是指医生与患者分别处于不同的地理位置,远程医生借助于视频、音频、图像、力觉等临场感的装备与技术参与开展手术的过程[3]。一般把患者所在的位置称为患者端,把远程医生所在的位置称为医生端。从实时性与同步性角度可将远程手术分为3类,即离线方式、远程监控方式、交互方式。离线方式指医生端和患者端不同时发生通信交流,医生端接收由患者端发送的患者信息,然后医生对这些信息进行诊断,最后将诊断结果发回患者端,由在患者端的医生根据诊断结果开展手术。远程监控方式下医生端实时监测患者手术过程信息,并对手术过程给予指导和建议。交互方式需要医生端和患者端建立实时可靠的通信连接,医生端的医生借助力觉交互设备、操纵杆控制患者端的机器人执行手术指令开展手术[4]。
1 机器人远程手术的发展及应用
1995年,由美国斯坦福国际咨询研究所(Stanford Research Institute International,SRI)开发了世界上第1个机器人远程手术原型(图1),当时主要针对的是开放性手术。2001年9月7日,在美国纽约和法国斯特拉斯堡之间实施了世界上第1例微创远程机器人辅助手术,两地相距7 000 km多[5-6]。手术使用了由Computer Motion公司开发的宙斯(Zeus)机器人系统(图2a),接受手术的患者位于法国斯特拉斯堡,是1名68岁的胆结石患者,而外科医生位于美国纽约,最后手术获得了很大的成功,自此远程手术开始快速发展。

图1 宙斯(Zeus)外科机器人
由1999年成立的Intuitive Surgical公司,借助于SRI在医疗机器人方面的积累开发了具有远程功能的达芬奇(da Vinci)机器人[7](图2b),能开展泌尿、耳鼻喉、腹部、胸腔等远程微创手术,属于通用型的医疗机器人,并于2000年获得美国食品和药品管理局许可。
在da Vinci系统的基础上,在美国国防部支持下由SRI等多家研究机构开发了应对战场上无人看护环境下的远程手术机器人系统Trauma Pod(图2e),整套系统由手术机器人、护士机器人、手术器械更换装置、器具缓存装置、药物分发装置组成,能实现无人看护状态下的远程手术,预计2015年投入使用。
从2004年开始,在美国国家航空航天局(National Aeronautics and Space Administration,NASA)复杂环境任务组(NASA Extreme Environent Mission Operations,NEEMO)的引导下开展了一系列的远程手术实验。第7次NEEMO项目在美国宝宫瓶实验室开展,它是世界唯一一个永久性的海底实验室。手术采用Computer Motion公司开发的AESOP机器人,机器人由位于距离2 500 km的加拿大医生控制,机器人端有4名人员(1名具有手术经验的外科医生,1名内科医生没有手术经验,另外2名是潜水员没有任何医疗经验),进行超声波检查,超声波引导肿瘤囊液吸取、血管修复、肾结石的移除、胆囊切除手术过程。第9次NEEMO项目的开展选用由SRI开发的M7机器人(图2d),实验人员不要临时组装与配置机器人并进行实时的腹腔模拟手术,在整个手术中由微波卫星建立通信连接,手术延时达到3 s以模拟地球与月球之间的通信。机器人端由4名宇航员辅助远程医生开展手术,进行了重大伤病诊断与骨折外科手术操作[8]。第12次NEEMO项目进行的远程手术由M7机器人和由华盛顿大学等机构开发的RavenⅠ(图2c)执行[9],M7机器人在此次实验中完成了首次红外线引导的缝合操作。
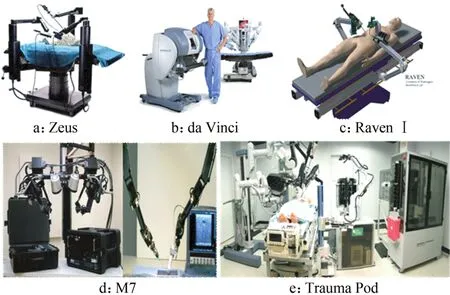
图2 具有远程功能的机器人系统
自RavenⅠ之后,加州大学圣克鲁兹分校与华盛顿大学开发了7套RavenⅡ系统,这7套系统具有开放的软件平台和统一的硬件配置。这些系统将分别装备于美国一些著名的医疗机器人研究机构,如哈佛大学、霍普金斯大学、加州大学伯克利分校等,旨在研究统一软硬件平台下的机器人远程手术,所有软件的开发将采用开源的方式进行。此项目的开展将极大地推进医疗机器人的研究进展。最近加州大学圣克鲁兹分校开发了RavenⅣ机器人,它有4个机械臂和2套摄像头组成,可由不同地方的2名医生合作完成远程手术。
随着国外远程手术机器人的发展,国内也开展了一系列远程手术的研究。2003年9月,基于北航设计开发的黎元BH-600医疗机器人和机器人遥操作系统,远程立体定向脑外科手术在北京和沈阳之间进行,主治医师在北京而患者在沈阳,患者为1名因脑出血压迫神经而偏瘫失语的中年男性,手术进行了50 min,术后患者偏瘫失语症立即消失,这也是国内第1例远程手术[10]。2012年12月,由北京航空航天大学和海军总医院合作开发的BH-7机器人系统(图3)完成了我国首次海上远程手术;手术过程中,医生位于北京的海军总医院远程中心,患者位于太平洋某海域的医院船上,手术通过卫星通信建立通信连接,最后手术获得成功[11]。

图3 BH-7机器人系统
2 各主要远程手术机器人的特点
2.1 da Vinci da Vinci机器人手术系统主要由医生控制台、1个装有4支7个自由度交互手臂的床旁机械臂塔和1个高精度的3D高清视觉系统构成。借助于高清立体成像、多关节臂自动化控制及光缆信号传送等高科技设备,使其具备了三维高清术野、手臂无抖动、镜头固定、活动范围广、器械移动度大等优点,并且改变了术者站在手术台旁操作的传统模式,由主刀医师坐在控制台前完成手术全过程[12]。
系统特点:①仿真手腕,人手的全部动作被实时转化为精确的机械手动作,可运用开放式手术中使用的任何技巧;②三维立体图像,采用双镜头三晶片数码摄像系统,是唯一具有真正三维景深和高分辨率的系统;③手术操作更精确,与腹腔镜(二维视觉)相比,因三维视觉可放大10~15倍,使手术精确度大大增加;④设备体积庞大,价格昂贵,另外系统维护与使用成本也很高。
2.2 Raven Raven是以da Vinci为原型开发的,相对于da Vinci,它结构更加紧凑,体积更加轻巧,最新开发的Raven系统总质量不超过30 kg。Raven系统具有2条机械臂1个观察手术现场的摄像头和1个可以进行在线远程手术的机器人手术界面。它允许医生从远程位置操作机器人系统,可以为偏远地区提供更好的专家医疗。整套系统是在Linux系统下开发的,并且完全是开源的,允许用户根据需要自行修改代码,这让它可以很容易地与其他装置相连接,为研究人员进行外科手术的实验和协作创建了一条通路。
系统特点:①结构轻巧,紧凑,质量轻;②开源的软件平台,更适合远程手术的普及和推广。
2.3 Trauma Pod 基于战场环境下伤员救治的特点和无人作战计划的完善,在美国国防部支持下由SRI等多家研究机构开发了应对战场上无人看护环境下的远程手术机器人系统Trauma Pod,整套系统由手术机器人、护士机器人、手术器械更换装置、器具缓存装置、药物分发装置组成,能实现无人看护状态下的远程手术。这是迄今为止最复杂的远程手术系统[13]。
系统特点:①系统复杂,智能程度高;②成本高,不便推广。
2.4 BH-7 BH-7机器人具有5个自由度,是北京航空航天大学与海军总医院针对海上远程环境下脑外科手术开发的一套远程系统。为了解决卫星通信延时的问题,系统采用了虚拟手术技术将远程的视频图像与预测的虚拟图像融合在一起,这样增强了系统的安全性和可靠性,同时也在很大程度上降低了延时对系统的影响。针对海上环境下船体的振动、摇摆以及手术环境空间狭小等因素,BH-7机器人在结构设计、误差分析与补偿方面也进行了相关的研究。
系统特点:①体积小,结构紧凑;②满足一定动态环境下手术的开展;③系统功能单一,只针对脑外科手术中的立体定向手术。
3 展望
随着相关技术的发展和应用需求的不断扩张,远程手术已不再局限于设备齐全、手术环境理想的医院手术室,复杂环境下远程手术的研究已成为当前研究的热点。这些复杂环境包括海上环境、水下环境、太空环境、战场环境等,对远程手术过程中机器人的设计提出了新的挑战和要求。海上环境下的振动、摇摆要求机器人具有自适应、避碰性高的控制系统;水下环境下的狭小空间、太空环境中的失重和超长延时需要机器人体积更加轻巧及自主手术能力更强、更加智能。为应对复杂环境下缺乏专业医护人员的情况,机器人人机交互效率、手术流程及执行效率也需要进一步的研究和改进。
理想化的手术机器人还应具备以下特点:①设计人性化,操作平台符合人手力学特点,具有更丰富的感觉反馈;②数据传输实时化,感觉反馈及操作指令消除时差阻滞;③软件支撑智能化,可随时人工介入,并允许麻醉医师进入现场观察患者生命体征;④价格平民化,购置价格、维修费用合理及使用花费在普通民众经济能力承受范围内,便于在世界范围普及推广。
[1]国家863计划智能机器人专家组.机器人博览[M].北京:中国科学技术出版社,2001.
[2]Ajami S,Lamoochi P.Use of telemedicine in disaster and remote places[J].J Educ Health Promot,2014,3:26.
[3]Rosser JC Jr,Young SM,Klonsky J.Telementoring:an application whose time has come[J].Surgical Endoscopy,2007,21(8):1458-1463.
[4]Crowther M.Phase 4 research:what happens when the rubber meets the road?[J].Hematology Am Soc Hematol Educ Program,2013,2013:15-18.
[5]Marescaux J,Leroy J,Rubino F.Transcontinental robotassisted remote telesurgery:feasibility and potential applications[J].Ann Surg,2002,235(4):487-487.
[6]Marescaux J,Leroy J,Gagner M,et al.Transatlantic robotassisted telesurgery[J].Nature,2001,413(6854):379-380.[7]Kwartowitz DM,Miga MI,Herrell SD,et al.Towards image guided robotic surgery:multi-arm tracking through hybrid localization[J].Int J Comput Assist Radiol Surg,2009,4 (3):281-286.
[8]Doarn CR,Anvari M,Low T,et al.Evaluation of teleoperated surgical robots in an enclosed undersea environment[J]. Telemed J E Health,2009,15(4):325-335.
[9]Lum MJ,Friedman DC,Sankaranarayanan G,et al.The RAVEN:design and validation of a telesurgery system[J]. Int J Rob Res,2009,28(9):1183-1197.
[10]Wang T,Wei J,Liu D.An internet robot assistant teleneurosurgery system case[G]//IEEE.Proceedings of IEEEPRSJ international conference on intelligent robots and systems.Beijing:IEEE,2006:2845-2849.
[11]赵全军,钱阳明,田增民,等.长航中不同海况下脑外科手术定位机器人系统的精度测试[J].中华航海医学与高气压医学杂志,2012,19(6):379-381.
[12]Shin DH,Dalag L,Azhar RA,et al.A novel interface for the telementoring of robotic surgery[J].BJU Int,2014 [Epub ahead of print].
[13]Garcia P,Rosen J,Kapoor C,et al.Trauma Pod:a semiautomated telerobotic surgical system[J].Int J Med Robot,2009,5(2):136-146.
Status and prospect of research on robot remote operation
XU Wuyi1,YANG Wen2,LU Wangsheng3
(1.The Group of Experts,Navy General Hospital,Beijing 100048,China;2.Department of Gastroenterology Cadres,Navy General Hospital,Beijing 100048,China;3.Department of Neurosurgery,Navy General Hospital,Beijing 100048,China)
Remote operation of robot is controlled by the robot to complete the operation with remote medical information platform of two-way real-time transmission and interaction mode,which has been gradually applied in clinical departments.This paper reviewed the application of remote operation and some typical robot remote operation,and the prospect of the development of its challenges,and prospects.
Remote operation;Robot;Medical robot
R61;R-05
A
2095-3097(2015)02-0094-04
10.3969/j.issn.2095-3097.2015.02.009
2014-12-18 本文编辑:徐海琴)
国家高技术研究发展计划(863计划)项目(2010AA044 001)
100048北京,海军总医院专家组(徐武夷),干部消化科(杨 文),神经外科(卢旺盛)
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
安徽医学(2022年3期)2022-03-22 09:17:36
英语文摘(2021年11期)2021-12-31 03:25:18
学生天地(2018年19期)2018-09-07 07:06:30
小太阳画报(2018年3期)2018-05-14 17:19:26
文学港(2018年1期)2018-01-25 12:48:30
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19