浅谈精密单点定位技术在GPS 辅助空中三角测量中的应用
2015-11-25 09:07:12王国民
城市地理 2015年16期
王国民
(青海省第一测绘院,青海 西宁 810001)
一、获取基于精密单点定位技术摄站点坐标的方法
精密单点定位技术实际上就是通过自身计算机的GPS 或者IGS 提供的稳定精密种差和精密星历,利用具有相应的载波相位以及双拼伪距GPS 接收机来对数据进行观测,是一种能够全球高精度定位任何方位的定位技术[1]。并且可以与ITRF技术一样可以在全球范围内进行高精度定位,与传统技术拥有差不多的精度,但是十分有效和简单,能够快速处理和独立的结算各站,计算量相对比较小[2]。
二、GPS 辅助光束法区域网平差误差方程
(一)对应点和像点之间应该遵循几何关系
在测量航空摄影中,中心投影是航空像片,所以,在航空像片中,在理论上物方空间坐标能够与像平面坐标一起充分符合物点、投影中心、像点处于同一直线中共线条件方程,因此,建立以下的数学网平差模型:
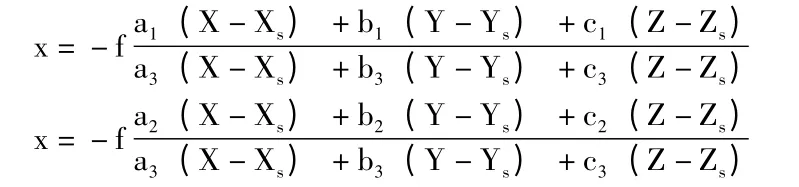
其中X、Y、Z 是a 点物点在物方空间直角坐标,x、y 是像点a 依据像点为原点的平面坐标,f 是航摄仪主距,a1、a2、a3……是φωκ 表示的方向余弦,Xs、Ys、Zs是物方坐标中投影中心的坐标。
(二)系统误差模型
在网平差正具有GPS 摄站坐标点和像点坐标两种原始观测值。可以利用像点坐标函数来表示像点坐标观测值系统误差,这种误差很难得到,最典型模型就是德国Ebner 提出的拥有十二个附加参数的模型。充分考虑一个图像中具有九个标准配置点,已经广泛应用到航空摄影测量中,此外,如果航线不能在一定程度上形成具有连续15 分钟飞行时间,载波相位GPS 动态观测仪会形成线性系统误差:
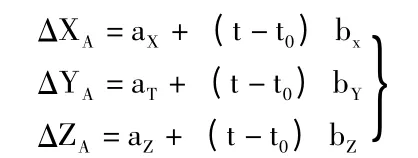
其中ΔXA、ΔYA、ΔZA是改正的GPS 相位中心坐标,t 是摄影机曝光时间、t0是参考时刻,ax、ay、az、bx、by、bz是漂移参数。
(三)GPS 辅助光束法区域网平差误差方程
网平差实际上就是利用精密单点定位或者差分定位技术来得到GPS 摄站坐标,然后适当的把带权观测值放入到网平差中,然后合理的使用统一的算法和数学模型确定精密点位置,从而对质量进行分析和评论的方式。所以,网平差数学模型主要是建立在自检校光束法区域网平差中充分分析航摄仪投影中心坐标和GPS 摄站点坐标的几何关系的误差改正后的基础误差方程:
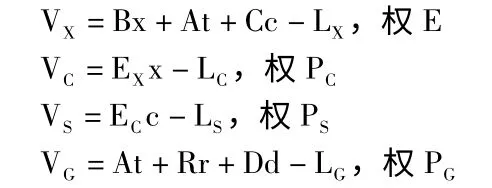
其中,A、B 是对于x、t 未知数系数矩阵、Vc、Vx、VG、Vs是地面控制点坐标、像点坐标、GPS 摄站点以及虚拟自校验参数。d 是漂移误差改正阐述向量,x 是加密点坐标未知数增量向量,r 是偏心分量未知数向量,t 是像片外方位元素未知数增量向量,c 是自检校参数向量。
三、对比差分定位与精密单点定位的GPS 辅助空中三角测量的精度
利用差分定位技术得到的数据定位摄站坐标可以在一定程度上适合网平差不同尺寸比例成图的实际规范需求。现阶段已经得到一定认同,所以,比对差分解算和精密单点定位的较差能和结果可以很好的说明精密单点定位定位技术是否可以切实的符合和满足GPS 辅助空中上三角测量的实际需要,依据航摄区域的实际测量数据信息进行一定的三角测量实验,使用Trip 软件来结算动态数据,可以把得到的结果使用在三角测量中,结果如下表:
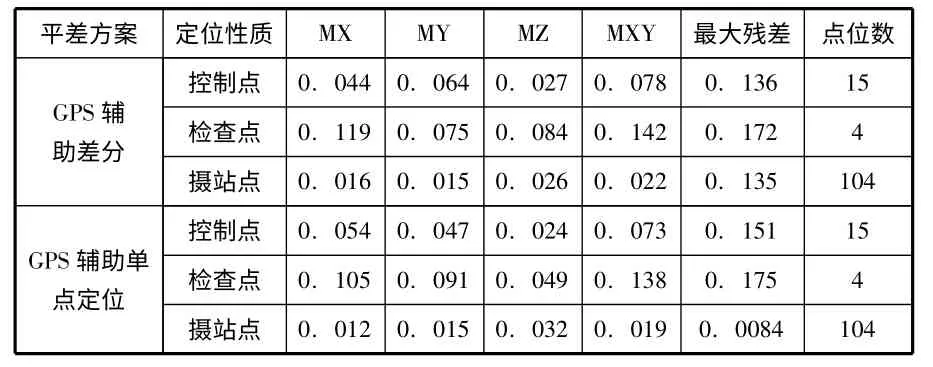
表一 对比差分定位与精密单点定位的GPS 辅助空中三角测量的精度表
从上述表格数据可以发现精密单点定位技术在GPS 辅助空中三角测量中的应用,不仅可以简化作业过程,还可以避免在航飞的时候进行地面建设基站,此外,还可以为三角测量提供精确的数据信息,能够获得类似于差分定位技术的精度加密结果。
[1]袁修孝,付建红,楼益栋等.基于精密单点定位技术的GPS 辅助空中三角测量[J].测绘学报,2011,36 (3):251-255.
猜你喜欢
导航定位学报(2022年4期)2022-08-15 08:29:12
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
测控技术(2018年10期)2018-11-25 09:35:40
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
测绘科学与工程(2017年5期)2017-05-07 06:30:42
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
遥感信息(2015年3期)2015-12-13 07:26:50
航天返回与遥感(2014年1期)2014-07-31 17:55:36