
防晃电智能控制模块设计与分析
2015-11-18 11:55:18姜万东迟玉国
电气技术 2015年9期
王 野 姜万东 迟玉国
(1. 丽水学院电子与电工技术创新重点实验室,浙江 丽水 323000;2. 江苏国网自控科技股份有限公司,江苏 昆山 215311)
电网因雷击、短路、重合闸、同一段设备起动或故障以及其他原因造成电网电压短时失压、电网电压短时大幅度波动、短时断电数秒的现象俗称“晃电”[1-3]。目前,一般防晃电低压微机保护装置大多采取将保护跳闸出口直接串入接触器线圈输出端,保护出口继电器多用小功率继电器,其断弧容量都比较小(一般为 50VA)。因此,当大功率交流接触器维持电流比较大,微机保护跳闸动作到断开交流接触器线圈时间比较长时,极易烧毁微机保护跳闸继电器节点。另外,当电力系统发生晃电时,电网电压在某一瞬间甚至低于接触器线圈的释放电压,导致低压马达停止运行,也会给用户带来严重的损失[4-5]。
文献[6-9]根据防晃电持续时间短、电压波动范围大等特点,提出分批自起动技术或采用专门的防晃电交流接触器、TPM-MD延时节能模块及节能型交流接触器等技术。文献[10-11]提出利用单片机实现防晃电智能交流接触器的设计。文献[12-13]指出采用专门的防晃电交流接触器不适于防晃电要求较高的场合,而采用延时节能模块需要与接触器构成双线圈结构,不利于快速动作和切换。文献[14]提出了一种新型防晃电的接触器智能控制器,该方法综合运用了防晃电技术、电力电子技术和单片机技术,但只考虑了晃电情况,而没有考虑交流电压跌落时断电的处理。
综上所述,现有的防晃电技术均考虑单一防晃电功能,而且功能不够完善。本文采用先进的微电子技术和电力电子技术,设计并实现了具有防晃电智能控制模块和微机保护装置结合的方式实现智能控制接触器跳闸功能。同时,利用防晃电智能控制模块判断电力系统发生交流电压跌落原因:外部导致的断电故障或是晃电故障,并且利用将交流切换到直流供电维持系统的稳定运行。该防晃电智能控制模块设计兼顾了节能控制模式应用,降低接触器功耗。
1 防晃电智能模块装置功能
2 防晃电智能跳闸设计与实现
2.1 防晃电智能跳闸模块硬件的实现
防晃电模块的硬件实现部分,如图1(a)所示,分为四大部分:①IGBT、大电阻R和继电器J1组成无弧切断电流电路;②继电器J2构成交流切换直流电路;③电源电路、测量电路和微处理器;④智能跳闸开入量输入电路。图1(a)中J1和J2继电器的选取规则需承载接触器运行与启动电流:选取的继电器接通电流应大于接触器启动电流并留有充裕量。
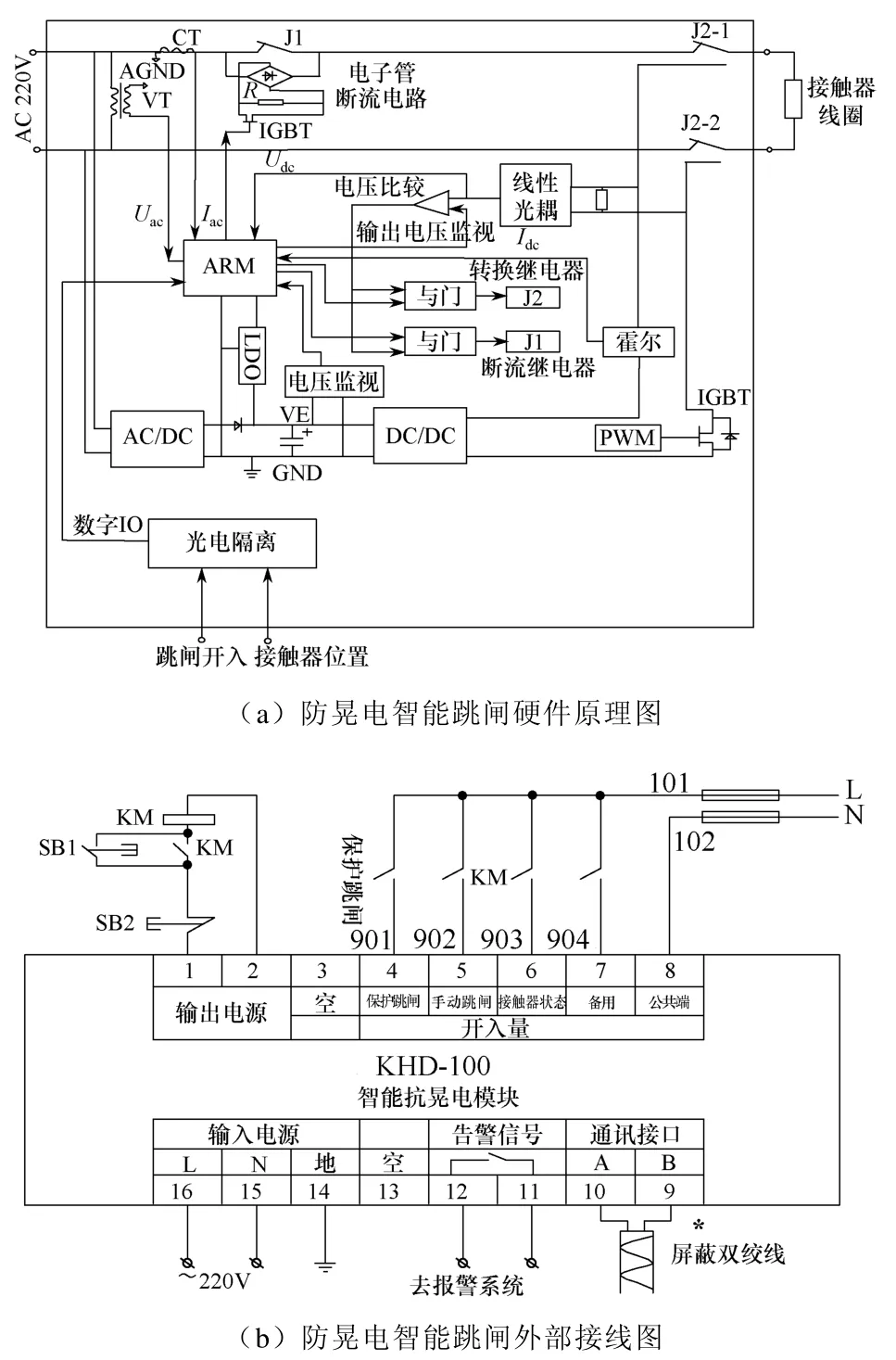
图1 防晃电智能控制模块内部/外部原理图
防晃电智能跳闸外部接线如图1(b)所示。防晃电装置在上电后,检测到跳闸输入信号[图1(a)中的跳闸开入信号,对应图1(b)中的端子4输入]变为高电平后,经过延时防抖确认,防晃电装置将判断自己的运行状态,实现智能控制跳闸出口:
如果为交流运行状态,说明接触器线圈[接触器线圈对应图1(b)中的KM线圈]目前为交流电供电状态,则将触发 IGBT导通,同时启动继电器J1,继电器 J1断开后(通过延时确保),软件系统将IGBT关断,与IGBT并联的电阻R投入到线圈回路中,线圈回路电流迅速减小,接触器开始释放跳闸;如果为直流运行状态,接触器线圈处于直流供电状态,软件控制系统关闭 PWM脉冲输出,关闭直流电压输出,交流接触器释放跳闸。
2.2 防晃电智能跳闸控制模块软件的实现
由硬件电路可知,整个智能跳闸过程为无触点断弧过程,防晃电智能跳闸控制系统流程图如图 2所示。
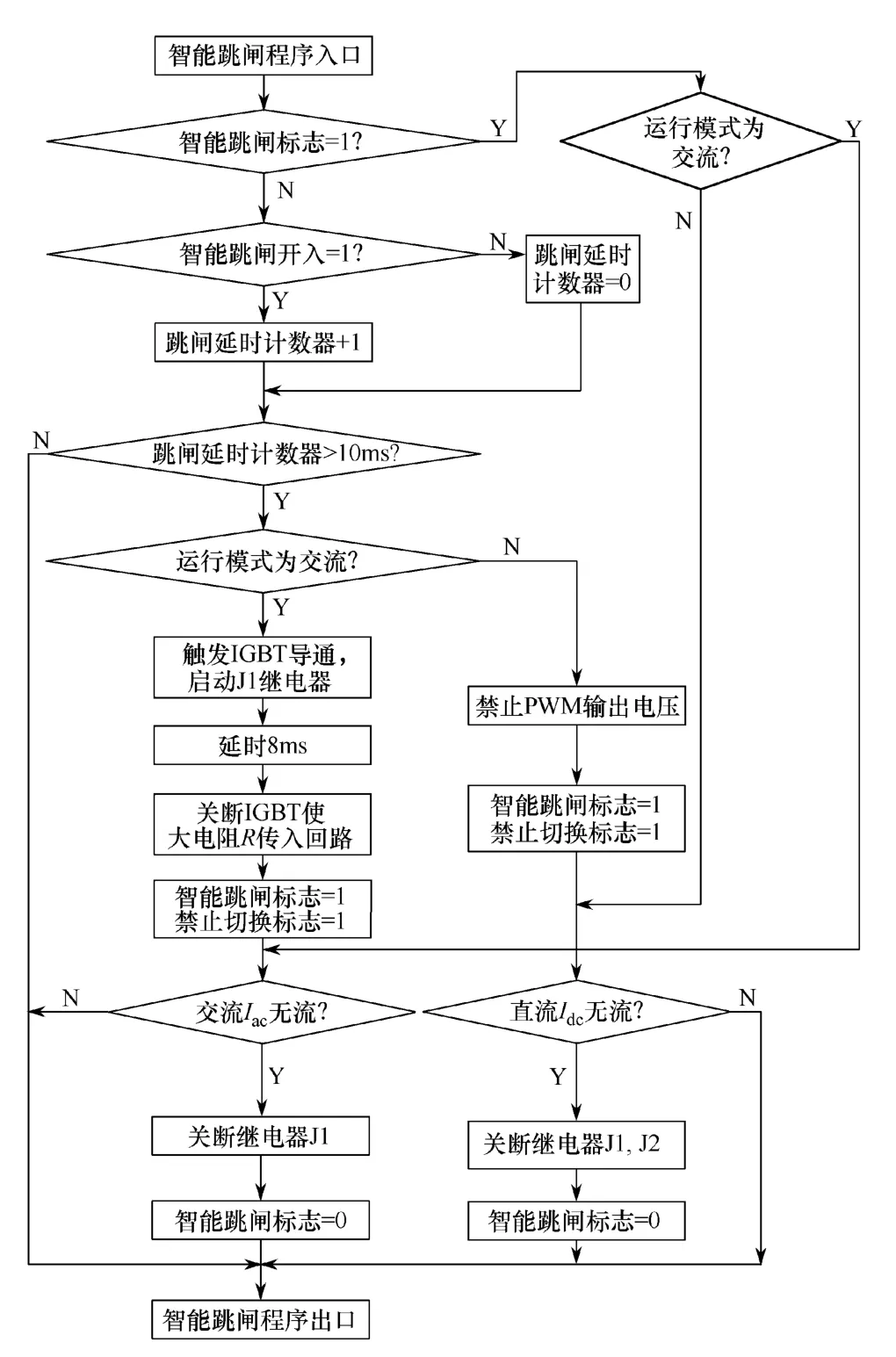
图2 防晃电智能跳闸软件控制流程图
1)智能跳闸标志为1
如果智能跳闸标志为 1,则说明防晃电模块已经启动。需要判断系统运行模式为交流或直流。
交流模式:如果没有交流电流,则直接到智能跳闸程序出口;如果有交流电流,则需关闭继电器J1,重置智能跳闸标志为0后智能跳闸。
(1)目标价格政策的实施要充分考虑市场的对外开放程度。市场开放程度不仅取决于市场准入政策,还与进口品与国产品之间的替代弹性有关。由于大豆市场开放程度高,对外依存度大,因此大豆目标价格政策的实施会对资源配置产生较大扭曲,从而使得政策的经济效率大大降低。为此目标价格政策的实施要充分考虑市场开放程度、进口依存度以及产品供给弹性等条件,并非适合任何产品市场。
直流模式:如果没有直流电流,则直接到智能跳闸程序出口;如果有直流电流,则需关闭继电器J1和J2,重置智能跳闸标志为0智能跳闸。
2)智能跳闸标志为0
如果智能跳闸标志为 0,说明防晃电模块需要等待外部的智能跳闸开入量输入。
外部智能跳闸开入为 1,则计数跳闸延时计数器,当这个计数器小于 10ms时,选择智能跳闸出口;反之,判断系统运行模式为交流还是直流。
交流模式:触发 IGBT导通,同时启动继电器J1,通过延时 8ms后,关断 IGBT,实现大电阻R接入回路,置智能跳闸标志为 1,同时禁止切换标志为1;直流模式:禁止PWM输出电压。置智能跳闸标志为1,同时禁止切换标志为1。
外部智能跳闸开入为 0,置跳闸延时计数器为0,转到跳闸延时计数器条件判断。
3 防晃电功能设计与实现
晃电延时目的是在交流系统发生电压跌落(电压突然跌落50V或降低到180V以下)时,智能控制系统启动交流向直流切换,切换到直流维持状态,接触器线圈在直流电压的维持下,主触点和辅助触点继续吸合。在晃电延时时间到后,判断交流电压是否恢复到正常值(程序默认185V以上),如果已经恢复,则切换到交流运行状态,装置认为供电系统发生了“晃电”;如交流电压低于正常电压值,则切断直流电压,并返回到交流模式,为下次系统上电做好准备,此时智能控制系统认为系统“断电”而非“晃电”。
如图3所示,T1为系统发生晃电的持续时间,一般在0.5~1s左右。晃电的延时时间(图中为Thd,为设置定值)设置需要大于系统发生晃电的持续时间,并有一定的裕量。T2(<400μs=为判断晃电并切换时间,在整个晃电延时Thd内,智能控制系统工作在DC模式,输出直流电压,直到Thd结束,切换到交流模式。如果在Thd延时结束时,交流电压恢复,认为是系统晃电;否则,认为是系统断电,而非晃电(因为电压跌落的时间持续时间超过了晃电设定时间)。
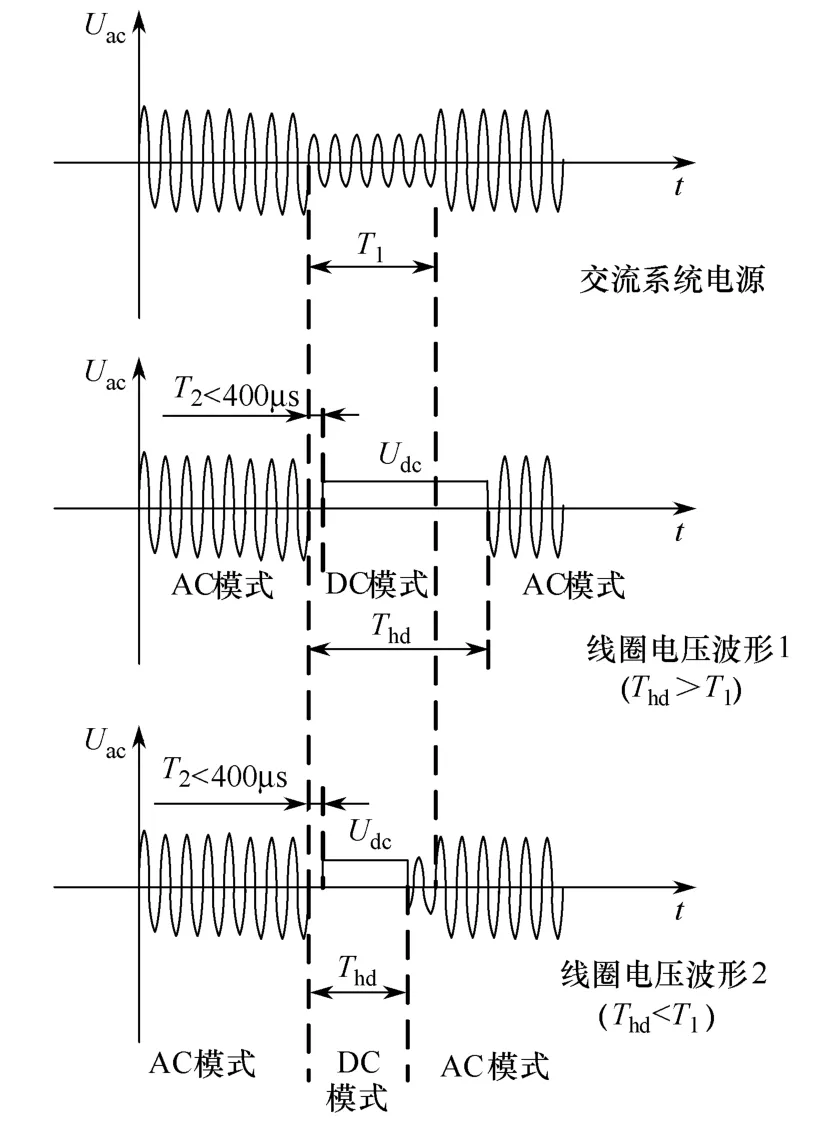
图3 晃电延时与交直流切换过程
图4所示为模拟系统晃电和系统断电情况实验方法。其中 KK为空气开关,用来模拟系统断电和晃电;RL用于模拟在实际应用过程中控制柜和现场分合按钮之间的长距离走线电阻;SB1为模拟现场控制合闸按钮,SB2为模拟现场分闸按钮,KM为接触器辅助接点,XQ为接触器线圈。图 5(a)和图5(b)分别给出电力系统交流电压跌落时,利用泰克示波器TDS 1012C-SC实测交流切换到直流的状态后供电系统未恢复与恢复到交流波形图。
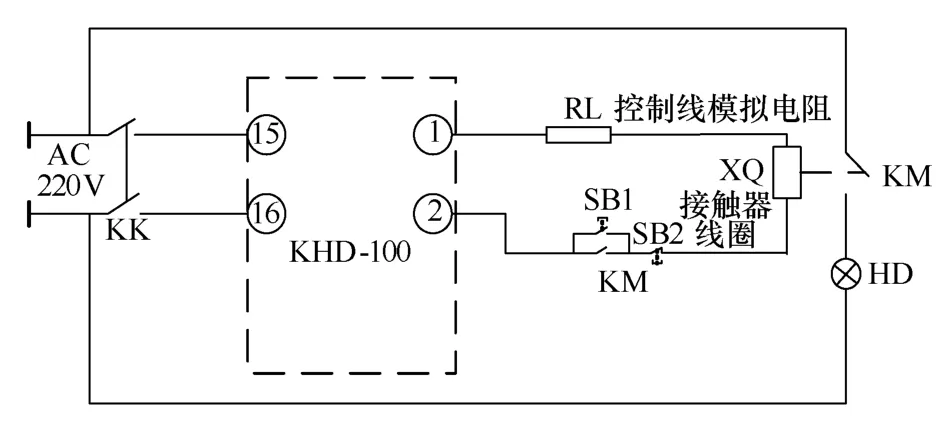
图4 实验分析示意图
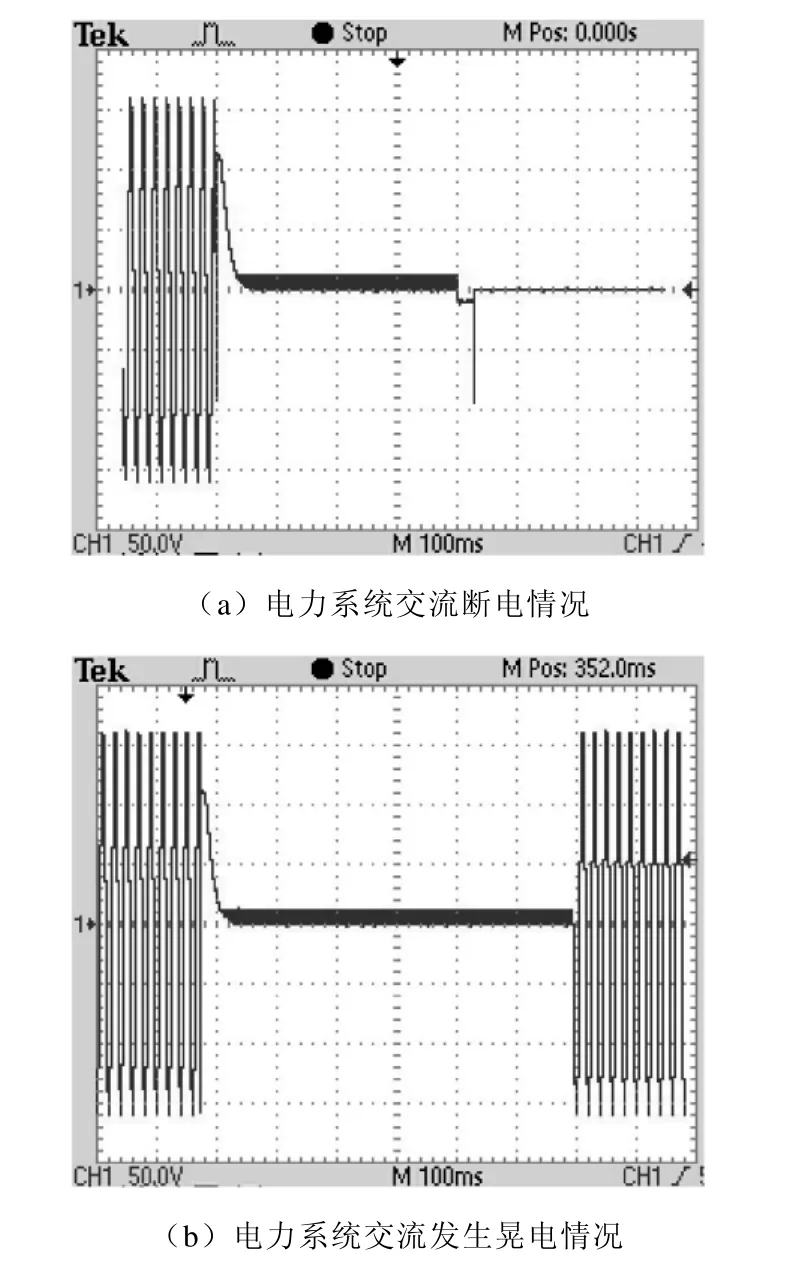
图5 电力系统交流发生系统断电/晃电情况
图5(a)所示交流系统发生电压跌落时,防晃电智能模块将交流切换到直流运行状态。利用防晃电智能模块提供自动输出的直流电压维持交流接触器吸合,维持时间(设定的晃电延时时间)持续到释放接触器。但系统并未及时的恢复到交流运行状态。此时,防晃电智能装置将释放交流接触器,认为是外部的原因导致的断电故障。图5(b)可以看出,在交流切换到直流维持设定的晃电时间之后,系统又重新切换回到交流运行状态,说明系统发生了短暂的晃电故障。
防晃电智能模块,可以运行在节能模式,不仅可以防止晃电,又可以降低接触器能耗。表1给出系统运行在交流模式(常规交流接触器装置)和直流节能模式(加装防晃电智能控制系统)能耗对比数据,该数据是选用CJ40-200交流接触器实验而得。数据表明用户在直接应用常规交流接触器防晃电的情况下,实测电压为217.6V,有功功率为28W,年度量为 245kW·h。而在应用防晃电智能控制系统选择直流节能运行模式工作时,其电压输出为6V,有功功率为2.1W,年电度量为45kW·h,节能比例为81.63%。

表1 交流运行和直流运行模式下节能数据比较
4 防晃电智能控制模块优越性
防晃电智能控制模块的优越性,具体如下:
1)完全实现智能切换,切换时间小于2ms。
2)抗晃电模块,根据测量出线圈交流维持电流Iac,在接触器线圈失电时,快速切换到直流电源供电。直流源的输出直流电流为Idc=0.9Iac,确保接触器直流可靠维持。
3)用户可设置维持时间,调整为0.5~5s。
4)可靠的晃电切换条件:①电压跌落;②电流没有明显增大。条件①和②必须同时满足才切换。否则,认为属于异常(如接触器线圈短路)。
5)高达3A的直流输出电流。
6)直流电源的控制采用超级电容储能。用大功率的运放作为直流电源输出回路。支持最大 3A直流输出维持电流,且内部损耗功率小。
7)可靠的切换判别,自动识别接触状态,无需接触器节点接入。
防晃电智能控制模块已应用在河南神马六六盐项目,投入运行至今获得了用户良好评价。
5 结论
防晃电智能控制模块的开发解决了大功率接触器使用过程中,利用跳闸继电器节点直接切断电源实现接触器跳闸,极易引起跳闸出口继电器拉弧失败,使继电器出口接点粘联的问题。通过防晃电智能控制系统的无断弧切断电流电路功能,可以在交、直流模式运行下有效地控制跳闸出口;同时,采用防晃电智能控制模块可以选择直流运行方式,降低接触器的能耗;在电力系统交流电压跌落时,该智能模块可彻底的解决由于系统电源晃电问题给用户造成的困扰和严重的经济损失。
[1] 董勇. 防晃电技术在低压配电系统应用[J]. 冶金动力, 2009(3): 64-65.
[2] 王蛇良. 防晃电技术在化工生产中的应用[J]. 电工技术, 2006(11): 73, 89.
[3] 黄卓林. 防晃电技术及其在钢铁企业自备电厂的应用[J]. 电工技术, 2007(4): 72-74.
[4] 周翠莲. 低压智能保护器的防晃电功能[J]. 电子技术与软件工程, 2013(6): 47-48.
[5] 田国政, 谭伟. 微机保护装置的发展[J]. 电网技术,2006(S2): 358-361.
[6] 宋玉才, 何国平. 防晃电技术在石油化工企业中的应用[J]. 电气技术, 2007(7): 73-75.
[7] 赵博识, 汪岩青. 马刚新区能源系统防晃电措施应用[J]. 冶金动力, 2011(2): 6-8.
[8] 林抒毅, 许志红. 晃电故障下交流接触器的工作特性分析[J]. 中国电机工程学报, 2011, 31(24):131-137.
[9] 孙伟森. 石油化工装置抗晃电措施的探讨[J]. 电工技术杂志, 2003(9): 82-84.
[10] 汤龙飞, 许志红, 庄红良, 等. 抗晃电智能交流接触器设计[J]. 低压电器, 2010(19): 13-16.
[11] 田卫华, 程祥, 齐晓轩, 等. 低压电机再起动控制器的设计与实现[J]. 自动化技术与应用, 2006, 25(6):60-61, 64.
[12] 张朝伟. 抗晃电交流接触器应用技术[J]. 电工技术,2004(6): 47-48.
[13] 张风平, 哈新智, 帅安文, 等. “晃电”不停机的解决方案[J]. 化工自动化及仪表, 2007, 34(1): 86-88.
[14] 苏晶晶, 许志红. 新型抗晃电的接触器智能控制器[J]. 低压电器, 2011(23): 12-17.
[15] 李宏. MOSFET、IGBT驱动集成电路及应用[M]. 北京: 科学出版社, 2013.
猜你喜欢
自动化仪表(2020年10期)2020-11-13 03:31:00
铁道通信信号(2020年8期)2020-02-06 09:13:22
电子制作(2019年7期)2019-04-25 13:17:20
电子测试(2018年22期)2018-12-19 05:12:42
电工技术学报(2017年15期)2017-08-31 19:02:23
电子制作(2016年23期)2016-05-17 03:53:43
船舶力学(2015年6期)2015-12-12 08:52:20
电测与仪表(2014年15期)2014-04-04 12:05:18
电测与仪表(2014年8期)2014-04-04 09:19:36
自动化博览(2014年10期)2014-02-28 22:33:42
