
智能无功补偿装置自适应控制技术研究
2015-10-21 17:30蔡超殷建刚
工业设计 2015年12期
蔡超 殷建刚

摘 要:本文提出一种基于永磁真空断路器的智能无功补偿装置方案,能够实现断路器的精确控制,根据实时电网信息实现无功设备在最佳相位投切。仿真及试验结果表明:永磁真空断路器具有很强的可控性,智能无功补偿装置能够实现电压或电流相位的精确捕捉,两者结合的技术方案能够完成无功设备最佳时机的投切任务,有效地抑制了无功设备投切过程中的涌流和过电压暂态。
关键词:永磁真空断路器;智能无功补偿装置;涌流和过电压
随着电网规模的不断扩大,为实现电压控制和系统保护等功能,需要配备大量开关设备来投切电容器组、电抗器、变压器及输电线路等电气设备,起到降低电网损耗、提高供电可靠性等目的。传统的开关基本都采用三相联动式,动作相位具有随机性,动作时会产生很大的涌流和过电压,易损坏设备绝缘性能,由此所 造成的运行事故时有发生,给设备及电网运行安全造成了严重的威胁。
为降低这一暂态过程所造成的影响,国内外专家学者开展了大量研究,主要包含两个方面:一方面是通过提高开关设备灭弧性能或加裝过电压抑制装置,增加开关设备开断能力及减少过电压幅值。该方法不能从根本上解决问题,受设备自身质量影响较大,投切过程所产生的暂态过程依然明显;另一方面通过分相投切技术调整开关动作时序,并配合相应控制策略,有效限制开关动作时断口的电压及电流变化趋势,从理论上消除涌流及过电压,提高设备运行可靠性。相比国外,我国对相控开关的研究起步较晚,已有的应用多集中在高压领域,如66kV以上电容器、电抗器投切,500kV线路投切等,其使用设备多为国外进口产品。考虑到设备成本,在中压无功补偿领域应用较少,然而由操作过电压及涌流所造成的中压无功设备故障时有发生。为解决这一问题,本文提出一种基于永磁真空断路器的智能无功补偿装置,该装置尤其较为简单的结构特性,动作时间分散性较低,同时配合有效的修正控制策略,控制精度在±0.5ms以内,实现了对无功负载投切时机进行精确的控制,抑制合闸涌流,减少分闸重燃的概率,有效提高设备运行可靠性。
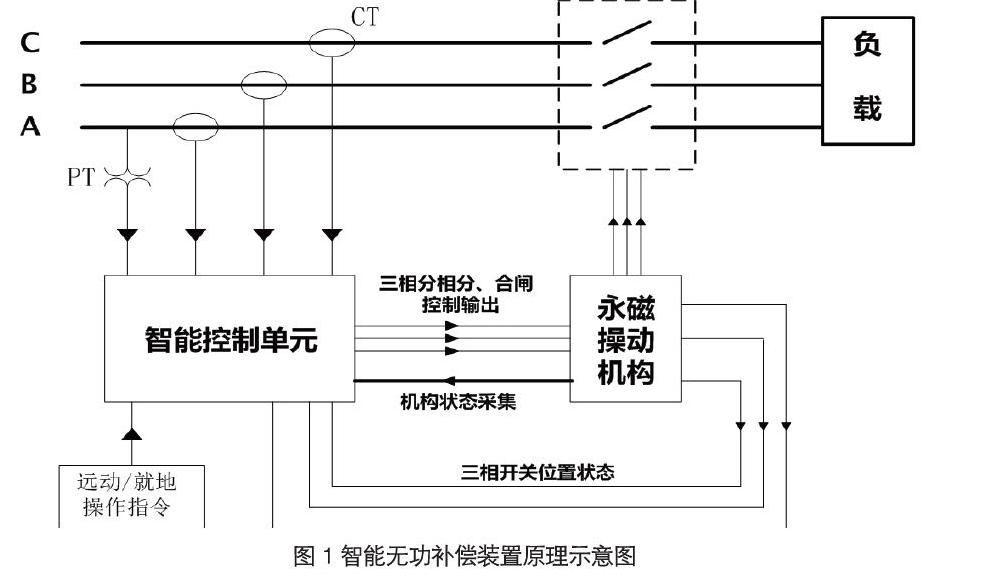
1智能无功补偿装置原理
基于永磁真空断路器的智能无功补偿装置原理,智能控制单元根据当前采集到的电网系统运行信息,根据控制要求,自动判断无功补偿设备投、切状态需求,并以系统电压、电流为参考信号,根据负荷类型精确控制开关触头在最佳相位关合或分离,实现无功补偿设备在电压或电流的最佳相位投入或切除,减小其投切过程中的暂态涌流和过电压,改善设备运行环境,延长设备使用寿命,提高电网电能质量和安全稳定运行。
以智能无功补偿装置合闸操作为例,其控制操作时序图如图1所示,为外部合闸操作指令输入时刻,为参考电压零点,为开关合闸动作时间,为选择的目标关合相位(三相可以具有不同的目标关合相位),为开关触头金属接触时刻,为开关各相延迟时间。通过控制的长短,能够起到修正开关动作时间分散性的目的,使得开关在目标值处合闸。同理装置分闸操作也一样,而要实现对不同的负荷特性的灵活的控制,则需要三相断路器均独立可控,且在其他条件一定的情况下,断路器分合闸离散性越小,我们的控制精度越高。
图1 智能无功补偿装置原理示意图
2永磁操动机构特性分析
操动机构是开关电器的执行机构,对操动机构的要求一般如下:关合短路电流时要有足够的机械功输出(克服由短路电流引起的导电回路电动力及触头推斥电动力);具有保持合闸功能;能自动遥控分闸也能手动分闸;自由脱扣功能等。传统的高压开关操动机构主要有:气动机构、液压机构、弹簧机构和直流电磁机构。CIGRE曾对高压开关及其操动机构可靠性进行了两次世界范围的调查研究。调查研究表明,开关大部分的故障为机械故障,常见的故障有:弹簧机构的锁扣故障;液压机构的漏油漏氮故障;气动机构的压缩机、干燥器的故障。弹簧机构分合闸操动启动后难于进行运动过程中的控制调节。传统机构由于其工作原理及结构的机械性决定了其不具有高可靠性且可控性低。
本文介绍一种直驱型永磁机构真空断路器永磁机构的主要零件包括:线圈、铁芯、永磁体、驱动连接杆、分闸簧,机构中唯一运动的部件是其铁芯,结构简单,无其他传动环节,从而减少了由于中间环节带来的损耗和不确定性。永磁机构使用永磁体实现合闸保持,当需要进行机构操动时(由合闸位置运动到分闸位置或者由分闸位置运动到合闸位置),线圈通以大小和方向可控的电流,线圈电流产生的磁场与永磁体产生的磁场叠加合成。铁芯在合成磁场的作用下运动到另一个极限位置,驱动开关完成分合闸操作,之后撤去线圈电流,依靠永磁体将铁芯保持在新的极限位置。
图2 电容器选相合闸操作时序
考虑到其他外界环境可能会影响永磁机构的磁路参数和磁化特性,从而影响断路器动作特性,采用数值分析方法对电容放电励磁情况下永磁机构动态特性进行建模,得到式(1)微分方程组:
(1)
式中,为永磁机构储能电容操作电压;为储能电容容量;、分别是励磁线圈电流和线圈电阻;为永磁机构全电磁系统磁链;为永磁机构动作时间;为系统运动部件归算到铁芯处的质量;为铁芯位移;为是电磁吸力与电磁系统磁能有关;是运动反力,包括弹簧负载反力和空气阻力,分别于位移和速度有关;为电磁系统磁能,是和的函数;和分别是线圈工作温度和环境温度;为永磁机构功耗;和分别代表线圈的外径和高度。
永磁机构动态过程历时时间较短,且电磁系统具有热惯性,,所以动作过程中的热变化量()可忽略不计。永磁机构的动态过程一般分为两个阶段,触动阶段和运动阶段。
第一阶段:激磁电流从0逐渐增大,由于产生的电磁力没有足够大,铁芯未开始移动,位移和速度=均为零的起磁阶段,该阶段的永磁机构动态方程为:
(2)
第二阶段:从激磁电流增加到某一数值而使得动铁芯开始运动的时刻开始(设为时刻),直至动铁芯到达另一极限位置(动作过程结束)为运动阶段,该阶段的永磁机构动态方程为:
(3)
通过对永磁机构动态过程进行建模分析,可以获得影响永磁机构动态特性的主要因素有:储能电容各参量、线圈参数、机械参数等。
电容电压是影响动态特性的重要因素,电容电压大小直接影响着线圈电流大小。在相同放电条件下,不同电容初始电压的机构动态特性不同。
机械参数直接影响着机构的反力特性和运动过程,机械参数除了受温度等环境参数的影响外,跟闲置时间也有关系。
3 操动机构动作过程自适应修正
永磁机构虽然动作可靠性高、动作时间离散性小,但外界条件仍会影响其动作过程的稳定性,我们需要对永磁机构的操动过程进行自适应修正,以补偿环境的影响,优化开关关合及分断性能,满足真空开关的理想操动曲线。
图3永磁机构铁芯位移自动修正反馈控制系统示意图
如图3所示,已IGBT驱动回路的PWM驱动信号作为控制量,传感器采集永磁机构铁芯位移作为反馈量,建立基于永磁机构机械系统的反馈控制,用于修正永磁机构的铁芯运动轨迹与理想的位移控制曲线的差异。
如图4所示,以IGBT驱动回路的PWM驱动信号作为控制量,传感器采集线圈励磁电流作为反馈量,建立基于永磁机构电磁系统的反馈控制,用于修正永磁机构的线圈电流大小与理想的励磁电流控制曲线的差异。
图4 永磁机构励磁电流自动修正反馈控制系统示意图
文中提到了智能无功补偿装置采用“铁芯位移自动修正反馈控制”为主,“励磁电流自动修正反馈控制”为辅自适应修正算法,所研制的永磁真空断路器动作时间离散性在±0.5mS以内,满足精确相位控制技术的需求。
4 仿真
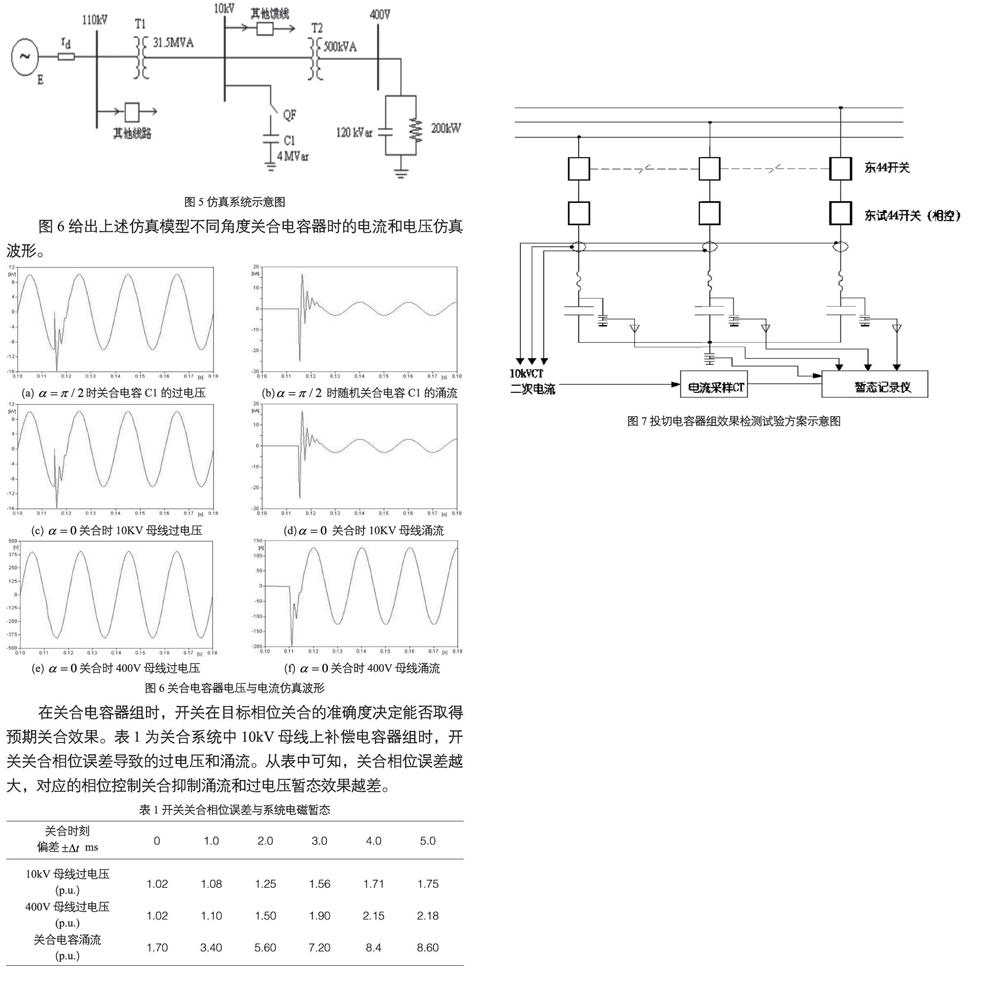
为了分析在电源初始相角不同时,开关关合无功电容器在电网系统引起的暂态现象,采用ATP/EMTP电磁暂态仿真软件对图6所示的系统进行仿真分析。
图5为电源初始相角=0和时,开关关合10kV母线上无功电容C1时系统暂态过电压和涌流波形。从图中可知,当电压过零关合电容器时,10kV母线和用户端400V母线上的过电压仅为稳态电压的1.02p.u.,系统关合涌流为稳态电流的1.7p.u.,系统开关操作暂态持续时间短;当开关在电压峰值关合电容C1时,10kV母线上出现1.75p.u.的暂态过电压和8.6p.u.的涌流,同时引起用户端400V母线上出现放大了的2.18p.u.过电压。因而,开关在电压过零关合电容器组可以有效地减少涌流和过电压,同时能抑制过电压在低压用户端的过电压放大现象。
图5 仿真系统示意图
图6给出上述仿真模型不同角度关合电容器时的电流和电压仿真波形。
(a)时关合电容C1的过电压 (b)时随机关合电容C1的涌流
(c)关合时10KV母线过电压 (d) 关合时10KV母线涌流
(e)关合时400V母线过电压 (f)关合時400V母线涌流
图6关合电容器电压与电流仿真波形
在关合电容器组时,开关在目标相位关合的准确度决定能否取得预期关合效果。表1为关合系统中10kV母线上补偿电容器组时,开关关合相位误差导致的过电压和涌流。从表中可知,关合相位误差越大,对应的相位控制关合抑制涌流和过电压暂态效果越差。
表1 开关关合相位误差与系统电磁暂态
5 试验
为验证基于永磁真空断路器的智能无功补偿装置在现场的应用效果,在湖北东津220kV变电站搭建如图7所示的的电容器组投切平台进行试验。
试验断路器是由东44(普通真空断路器)和东试44(相控断路器)两个断路器串联组成,在试验过程中先让东试44断路器在电容器投切过程中始终处于合位,用东44断路器投切电容器10次,再让东44断路器在电容器投切过程中始终处于合位,用东试44断路器投切电容器10次,完成电容器投切效果对比试验。东44开关关合,合闸过程中产生较大的涌流和过电压;东试44开关相控关合电容器,合闸过程电流、电压波形平滑,涌流和过电压得到较好的抑制;该电容器20次投切试验数据测量结果显示采用普通断路器(东44)关合电容器时产生涌流最大可达到6.07 p.u.,过电压最大可达1.70 p.u.;采用相控断路器(东试44) 关合电容器时的涌流抑制在1.18 p.u.以内,过电压抑制在1.17 p.u.以内,涌流和过电压抑制效果明显。
图7 投切电容器组效果检测试验方案示意图
6 结语
本文提出一种基于永磁真空断路器方案的智能无功补偿装置,并从原理、仿真和现场试验三个角度验证方案的可行性。该智能无功补偿装置方案应用于中压无功补偿回路中无功设备的投切,对抑制投切涌流和过电压暂态,改善无功设备投切环境,提高设备及系统安全稳定运行产生积极的作用。
参考文献:
[1] 杨庆,欧阳沙,司马文霞,等.真空断路器快速合-分闸操作10kV并联电容器的过电压机理[J].高电压技术.2014(10):3135-3140.
[2] 杜宁,关永刚,张景升,等.40.5kV真空断路器开断并联电抗器的过电压防护[J].高电压技术.2010(02):345-349.
[3] 张科,陈守聚,卢明,等.限制投切高压电动机产生过电压的试验研究[J].高电压技术.2001(06):63-64.
[4] 安韵竹,文习山,张婷婷,等.SF_6断路器预击穿引起并联电抗器合闸过电压的原因及防护措施[J].高电压技术.2013(01):75-80.
[5] 郭丽娟,梁小冰.10kV电容器组切换在用户侧产生的电压放大现象[J].电网技术.2003(02):21-24.
[6] 丁富华,邹积岩,段雄英.相控开关的最佳投切相位研究[J].高压电器.2005(06):408-411.
[7] 林功平.配电自动化与10kV智能化开关[J].电力系统自动化.2002(11):70-72.
[8] 钱家骊.相位控制高压断路器的动向[J].高压电器.2001(01):38-40.
[9] 段雄英,廖敏夫,丁富华,等.相控开关在电网中的应用及关键技术分析[J].高压电器.2007(02):113-117.
