
虚拟窗口阴影去除算法的车流量检测研究*
2015-10-19 00:33:22谭慎敏仝秋娟西安邮电大学通信与信息工程学院陕西西安7006西安邮电大学理学院陕西西安7006
网络安全与数据管理 2015年6期
谭慎敏,仝秋娟(.西安邮电大学 通信与信息工程学院,陕西 西安 7006;.西安邮电大学 理学院,陕西 西安 7006)
虚拟窗口阴影去除算法的车流量检测研究*
谭慎敏1,仝秋娟2
(1.西安邮电大学 通信与信息工程学院,陕西 西安 710061;2.西安邮电大学 理学院,陕西 西安 710061)
针对城市道路交通流量检测中的实时性和准确性的要求,在背景差分的基础上提出了一种改进的基于虚拟窗口检测的方法。通过获取前景目标尽量少的帧图像,快速建立虚拟窗口的初始背景模型,并实时更新背景;将 Sobel边缘检测算法引入前景目标检测,从而快速检测出前景目标变化的完整区域,提高检测的准确率;再使用基于HSV色彩空间直方图势函数去除阴影算法,进一步去除前景目标中的阴影区域,有效地保留了真实的运动目标区域;最后统计交通车流量,可结合其他信息(如红绿灯状态)做出该路段相应的交通流状况判断。通过实验结果证明,所提出的检测算法可有效应用于视频交通车流量检测中。
交通检测;虚拟窗口;背景差分法;去除阴影;Sobel算子
0 引言
交通车流量检测是智能交通 (Intelligent Transportation System,ITS)的一个重要研究课题,是进行车流量预测和当前路段车流量状况判断的基础。由于传统的检测方法存在维护不方便、检测时间长、获取信息单一等问题,使其使用范围受到限制。随着计算机技术和图像处
理信息检测技术的发展,目标检测在刑侦、ITS、遥感等各方面得到了广泛的应用。当前车辆检测的主要算法有:光流法[1]、图像差分法(包括帧间差分法[2]、背景差分法[3])。基于光流法的跟踪监测可以精确地检测出运动目标,但由于其运算时间长,难以满足实时性的应用要求,受噪声影响较大,从而很少实际使用。帧间差分法是
将视频序列中的图像进行相邻帧或多帧间差分运算检测出运动前景区域,对光照强度、天气变化不敏感,但在大多数情况下难以获得完整的运动目标。背景差分法通过当前帧和背景图像做差的运算,可以获得较为完整的运动目标,但需要获取实时准确的背景。在交通监控中,摄像头通常是被固定在道路正前斜上方的支架上,所拍摄到的图像并不是完全静止不动的,如数枝摇晃、大型车辆经过时带来的明显震动以及周围建筑物的影子等,这些都应该被归入到背景当中去。
针对以上方法的优缺点,本文采用背景差分法检测出运动前景区域,然后与轮廓检测相结合获取完整的目标轮廓,再采用阴影去除算法去除目标中的阴影部分,最后用自适应阈值算法更新背景与判决阈值获取前景目标。本文中的大部分计算都只对选定的虚拟窗口的图像进行处理,从而实现快速有效的交通车辆流量检测。
1 选取虚拟窗口
当车辆行驶到交通路口时,每辆车都会选择各自需要的车道行驶,因此可以在每个车道上设置检测虚拟窗口。根据摄像机安装的位置和角度,以及实际拍摄视频图像的大小范围,选取位置、大小合适的虚拟窗口,保证选取的区域方向尽量与车辆行驶方向垂直。一般都把虚拟窗口的位置选在每帧图像靠近下方位置,车辆在此区域互相之间的距离相对较大,不会出现车辆遮挡的问题。虚拟窗口的高度一般选5到10个像素,宽度尽量覆盖整个车道,本文每个车道最下方的第一个窗口取10个像素高度,再在每个车道上方超过一辆车左右的位置选取的第二个窗口取7个像素高度。每个车道上有两个虚拟检测窗口,一方面可以减小检测误差、提高检测准确率,另一方面也可以结合红绿灯的状态判断当前该路段的交通拥堵情况。虚拟窗口的选取如图1所示。

图1 虚拟窗口
2 窗口背景初始化及更新
2.1背景模型初始化
背景差分法的背景模型有人为给出、基于统计建立模型[4]等方式。手动给出要求在人观测到没有前景车辆经过时获取当前图像为背景。这种方式不但会带来成本投入增加,而且在大多数时间很难准确观测到直接的背景。而基于统计建立背景模型的方式就显得更具方便、快捷的优势。在实际监控中,每个前景目标只能在监控画面中存在有限的时间,在视频序列帧图像中造成差异较大的像素点主要是由运动目标引起的。因而在利用统计平均模型法简单、计算速度快的优点之上,尽量选取无运动目标的窗口图像建立背景模型,不仅计算时间短,而且初始化背景质量高,与真实的背景差异小。虚拟窗口背景模型初始化的步骤如下:
(1)选取视频序列前面一定帧数量n(一般不小于100)对应虚拟窗口图像进行背景建模。
(2)先对每帧图像进行预处理[5],再进行 Sobel[6]轮廓提取并优化处理。
(3)如果包含轮廓的最小矩形大于整个虚拟窗口的1/8,则认为该帧图像无前景目标,标记为1,否则为0。

其中,flagi是第 i帧图像的标记;Sobeli是第 i帧图像的轮廓图最小矩形大小,是虚拟窗口大小的1/8。
(4)当式(1)中i取到n时,如果标记为0的帧数不小于n/3,对所有标记为0的图像求均值作为初始化的背景模型,否则对所有n帧图像求平均作为初始化的背景模型。
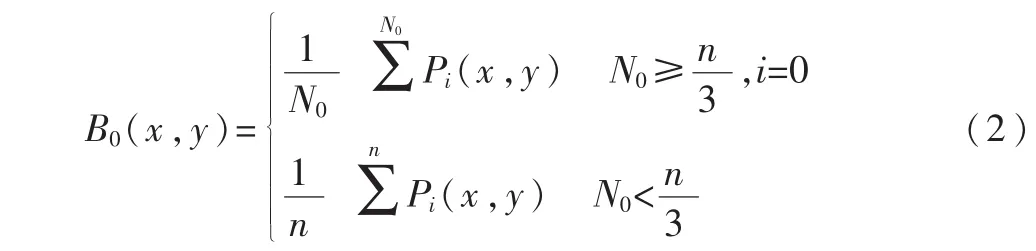
其中,B0(x,y)是初始化的背景模型,Pi(x,y)是第 i帧图像在点(x,y)处的像素值,N0是标记为 0的总帧数。
2.2背景模型更新
由于受到外界天气、光线等因素的影响,背景图像是不断缓慢变化的,有时还会出现例如经过洒水车造成的突变,所以需要背景模型能够实时更新,提供可靠的背景图像。本文采用改进的递归算法更新背景,递归算法的计算公式为:

其中,Bi(x,y)是当前背景,Bi-1(x,y)是上一帧背景,Ii是当前帧图像,α是学习率。当α取值过大会使更新速率过快,部分前景也会被误判为背景;当α取值过小会导致更新速率太慢,不能提供有效的实时背景图像。由此可见,如果α取值不合适就会严重影响车辆检测的准确度,通过多次试验取得最佳经验值为0.05~0.1。
改进新算法的基本思想是:当检测到车辆经过时,仍然使用上一帧的背景,在没有检测车辆时一直更新背景,同时更新背景的学习率和有车辆经过时前景判断阈值。具体步骤如下:
(1)初始化各个参数,获取当前(i)帧和上一(i-1)帧窗口图像,并进行预处理。
(2)计算当前帧和上一帧图像的均值currMean、Last-Mean,并取它们差值的绝对值abs(currMean-LastMean)。
(3)学习率更新为α=0.05+abs(currMean-LastMean)/1000.0,这样就有效地缩小了建模背景与真实背景之间的差距。
(4)当检测到车辆而背景没有更新时,为了判别出更高质量的前景目标,相应的阈值调整为大律法[7](Ostu)阈值。
(5)最终的背景更新算法计算公式为:

(6)如果程序没有结束,i自增 1,返回到步骤(1)继续执行直到结束。
3 前景目标检测
3.1边缘算法比较
为了获得较为完整的前景目标,可以利用边缘检测算法来获取目标轮廓。不同的边缘检测算法处理后的结果有很大的差异,常用的边缘检测算法有 Sobel算法、Robert算法、Laplace算法、Prewitt算法等[8-10]。本文采用Sobel算法,其基本原理是:边缘的灰度函数是一个一次函数y=kx,对该函数求一阶导数得到的斜率k是一个常数,而非边缘的一阶导数则为零,这样通过求一阶导数就可以判断图像的边缘了。但是,由于实际应用到图像中没一个准确的函数可以求导,就采用一个3×3的窗口来对中间像素点进行近似求导。Sobel算子有两个,一个是水平边缘检测,另一个是垂直边缘检测。两个算子如下所示:
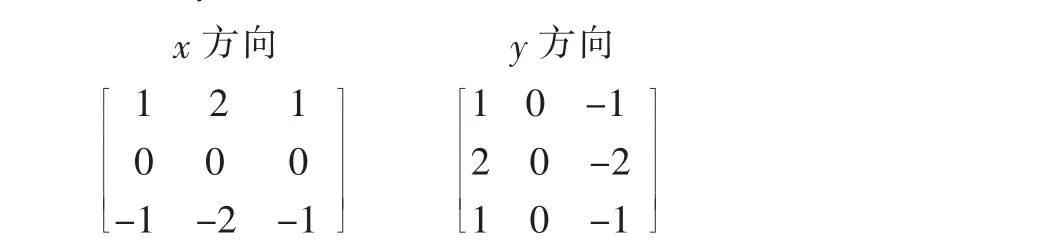
图像每个像素点的最终梯度和方向可用下式表示:

其中,Gx表示水平方向上的梯度,Gy表示水垂直向上的梯度。
在虚拟窗口检测的方法中,窗口与车辆运动方向垂直,而且车体本身的边缘主要在相对水平和垂直方向上,因此可以较好地检测出前景目标。将原始图像与4种检测结果进行对比,如图2所示,通过观察可以发现Sobel算法能够较好地检测出前景目标的边缘信息。
3.2HSV色彩空间直方图去除阴影
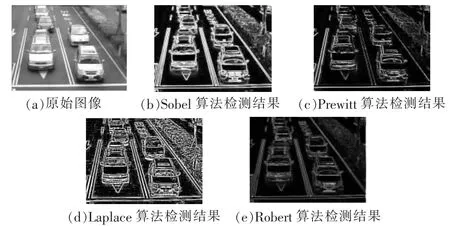
图2 4种算法检测结果
阴影是由于物体遮挡住了光线传播,不能穿过不透明的物体而形成亮度较暗的区域,也就是人们常说的影子。这种现象尤其在天气较好的早晨和傍晚会造成物体旁边出现较大的阴影区域。在目标检测领域,阴影常常会被误判为运动目标,因此消除阴影是必须要面临的一个问题。在总结前人研究成果的基础上,本文发现可利用HSV色彩空间[11]饱和度在阴影区和非阴影区变化微小的特点,结合直方图势函数[12]获取无阴影的前景目标。算法具体步骤如下:
(1)获取当前帧图像并转化到 HSV色彩空间,取出饱和度分量,计算其直方图函数。

(2)直方图势函数的定义为:

(3)根据直方图势函数计算其差分函数:

(4)把获取 P(k)的第一个由负到正的拐点,即直方图势函数的第一个峰谷作为去除阴影的阈值thr。

去除阴影的前景目标如图3所示。

图3 阴影去除
3.3交通流量检测
每个车道上的检测窗口都在同一水平线上,每辆车只能通过一个检测窗口,如果同时通过两个窗口,则在一般情况下是一个窗口检测到得多,另一个检测到得少,只有检测到多的窗口才计数,另一个窗口忽略计数。每个窗口会出现两种检测结果:(1)检测到车辆;(2)没检测到车辆。将前一帧检测结果与当前帧检测结果进行比较得到以下几种结论:从(1)到(2)表示车辆进入检测区;从(2)到(2)表示车辆还没离开检测区;从(2)到(1)表示车辆离开检测区;从(1)到(1)表示无车辆进入检测区。每个虚拟窗口的检测流程如图4所示。
结合红绿灯的状态和每个车道上的第二个检测窗口的检测结果,可以做出相应的判断:当绿灯亮时,每个车道上的两个检测窗口检测到车辆,并且在一定时间内没有计数的窗口超过一定数量就可判断该路段现在处于拥堵状态;或者将检测计数结果与该路段的吞吐量相比较也可做出相应的交通状况判别。
4 实验结果与分析
为了验证本文算法的有效性,实验选取了一段有明显阴影的交通监控视频,分别在有去除阴影算法和没有去除阴影算法的情况下进行检测对比。以第46、47帧和第366帧图像左下角虚拟窗口为例进行检测,结果如图5所示,检测结果的上图是没有去除阴影算法的检测结果,下图是本文有去除阴影算法的检测结果。

图4 虚拟窗口检测算法流程
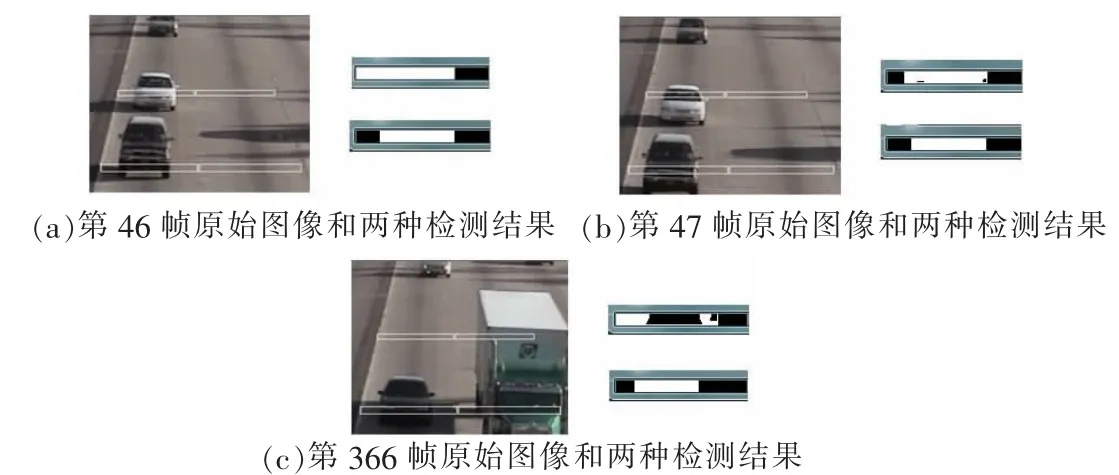
图5 检测结果对比
对比第46、47帧图像的检测结果,本文算法可以有效地去除阴影区域。在第366帧图像的监测区域中,全部检测区域被大型车辆的阴影覆盖,同时又有小型车辆从阴影区经过,本文算法也能很好地检测出前景目标,并去除了阴影区,满足了交通流量对检测准确性的要求。不同多车道检测结果如表1所示。从表1的结果可以看出本文检测算法的准确率可达97%以上,能够满足检测系统的准确性要求。
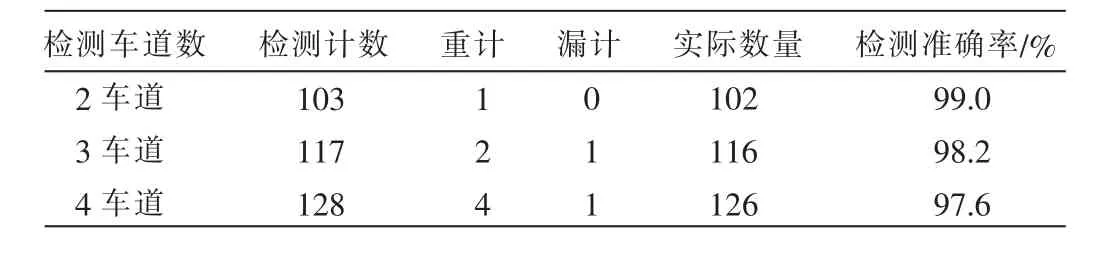
表1 不同多车道检测结果
5 结论
本文采用只对虚拟窗口内图像处理的算法,在具体算法上快速建立背景模型,并实时更新后,结合背景差分法和Sobel边缘检测算法提取出前景目标,再用去除阴影算法得到的前景与其融合得到更准确的前景目标区域。而且大多数运算是在灰度图的基础上进行的,只针对有效的信息进行处理,这样就大大加快了计算速度,使检测系统的准确性和实时性都有明显的改善,在ITS中将会有一定的实用性。但是阴影去除在虚拟窗口更窄的情况下检测效果会变得不理想,还需进一步研究,有望实现更复杂的功能。
[1]WIXSON L.Detecting salient motion by accumulating directionally-consistent flow[J].IEEE ransaction on Pattern Analysis and Machine Intelligence,2000,22(8):774-780.
[2]TSAID M,LAIS C.Independent component analysis based backgroundsubtractionforindoorsurveillance[J].IEEE Transactions on Image Processing,2009,18(1):158-160.
[3]王静,保文星.一种基于差分算法的视频运动目标检测技术[J].计算机应用与软件,2009,26,(12):68-70.
[4]KATO J,WATANABE T,TOGA S,et al.An HMM/MRF-based stochastic framework for robust vehicle tracking[J].IEEE Transactions on Intelligent Transportation Systems,2004,5 (3):142-154.
[5]GONZALEZ R C,WOODS R E.数字图像(第二版)[M].阮秋琦,阮宇智,译.北京:电子工业出版社,2007.
[6]付光远.一种基于Sobel分解算子的图像边缘检测并行算法[J].微电子学与计算机,2006(9):132-134.
[7]Zhu Qidan,Jing Liqiu,Bi Rongsheng.One-dimensional threshold average decomposition for two-dimensional Ostu algorithm[J].Proceedings of 2010 Chinese Control and Decision Conference,2010(10):2783-2788.
[8]Zhang Lei,BAO P.Edge detection by scale multiplication in wavelet domain[J].Pattern Recognition Letters,2002(23):1771-1784.
[9]郑莹,孙燮华.图像边缘检测 Laplace算子的改进[J].沈阳建筑大学学报(自然科学版),2005,21(3):268-271.
[10]Zhang Renyan,Zhao Guoling,Su Li.A new edge detectionmethod in image processing[C].Proceedings of IEEE International Sympo sium on Communications and Information Technology,2005:445-448.
[11]张丽,李志能.基于阴影检测的 HSV空间自适应背景模型的车辆追踪检测[J].中国图象图形学报(A辑),2003,8(7):778-782.
[12]陈云彪,郑贤超.运动目标去除阴影的跟踪[J].电子世界,2014(6):252-253.
Reserch of shadow removal algorithm for traffic flow detection based on virtual w indow
Tan Shenmin1,Tong Qiujuan2
(1.College of Communication and Information Engineering,Xi′an University of Posts and Telecommunications,Xi′an 710061,China;2.School of Science,Xi′an University of Posts and Telecommunications,Xi′an 710061,China)
In view of the accuracy and real-time requirements of urban road traffic flow detection,a new method based on virtual window detector is proposed.The initial background model of the virtual window is established quickly by acquiring the frame images of target prospects as little as possible,and the background is updated in real-time.In order to quickly detect changes in the entire region of foreground objects,the Sobel edge detection algorithmis introduced to the foreground object detection and improve the accuracy of detection.In order to further remove the shadow of the foreground object region and effectively retain the true movement of the target area,the potential function based on the HSV color space is used to remove the shadow histogram algorithm.Finally,traffic flow statistics can be combined with other information(such as traffic light status)to judge the road traffic flow conditions.Experimental results show that the proposed detection algorithm can be effectively applied to video traffic traffic flow detection.
traffic flow detection;virtual window;background subtraction;remove the shadow;Sobel operator
TP391.41
A
1674-7720(2015)06-0035-04
2014-10-22)
谭慎敏(1988-),通信作者,男,硕士研究生,主要研究方向:现代信号处理及应用。E-mail:tanshenmin@163.com。
陕西省科学技术厅资助( 2013K06 - 07 )
仝秋娟(1977-),女,博士,副教授,主要研究方向:矩阵理论及算法。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16 05:32:58
建材发展导向(2021年6期)2021-06-09 05:57:08
今日农业(2020年17期)2020-12-15 12:34:28
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
中国外汇(2019年11期)2019-08-27 02:06:32
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
太空探索(2016年10期)2016-07-10 12:07:01
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
物探化探计算技术(2015年2期)2015-02-28 17:42:47
