
飞翼布局飞机舵面偏转速率设计
2015-10-19 01:18何倩琳王立新
北京航空航天大学学报 2015年9期
何倩琳,王立新
(北京航空航天大学 航空科学与工程学院,北京100191)
为了提高隐身性能,飞翼布局飞机取消了尾翼,导致其本体阻尼特性下降以及横航向稳定性下降,需采用电传飞控系统以保证其具有优良的动态响应特性.对于这类高增益飞机而言,舵机系统作为飞行控制系统的执行机构,决定着飞机的动态响应品质.目前的舵机系统均为有速率饱和的非线性系统,当舵机速率达到饱和状态时,实现指令的时间变长,高阶闭环飞机系统将趋于不稳定[1].由于飞行控制系统是通过舵机系统将输入指令转化为舵面机械位移来实现控制,因此舵机的最大运动速度与舵面偏转速率的限制值之间存在着确定的对应关系.为保证采用电传飞控系统的飞翼布局飞机具有良好的动态响应特性,需合理地设计并确定其操纵舵面偏转速率的限制值.
目前,关于舵面偏转速率限制值的研究多集中于速率限制对人机闭环系统耦合振荡特性的影响方面[2-4].文献[5]针对导弹控制系统,从舵机回路的二阶系统响应特性出发,建立了舵面偏转速率限制值与输入指令幅值和舵机回路固有频率间的数学关系.在飞翼构型飞机舵面偏转速率的确定研究方面,现在仅开展了纵向舵面偏转速率大小对飞机短周期飞行品质等级的影响[6],尚未见有通过高增益闭环飞机飞行品质的设计要求,来确定其三轴操纵舵面偏转速率的研究.
本文针对Ⅲ类大展弦比飞翼布局飞机,依据舵面偏转速率限制值对飞机飞行品质的影响关系,建立了其三轴舵面偏转速率限制值的设计方法,分析了大展弦比飞翼布局飞机不同轴向偏转速率设计取值大小不同的物理原因,以供飞机操纵舵面设计时参考.
1 飞翼布局飞机的典型动态特性
1.1 运动阻尼特性
飞机短周期震荡阻尼主要与俯仰阻尼力矩导数Cmq和洗流时差力矩导数Cmα·有关[7].常规布局飞机的全机俯仰阻尼力矩主要来源于平尾,其他诸如机翼、机身等部件对Cmq的贡献很小.在近似计算中,通常仅考虑平尾的阻尼力矩,在此基础上增加10% ~20%以考虑翼身影响[8].由于取消了平尾,飞翼布局飞机的Cmq要比常规布局飞机小很多.
洗流时差力矩导数Cmα·所起的阻尼作用相对于Cmq要小很多.取消了平尾的飞翼布局飞机的Cmα·相对常规飞机而言非常小,可以近似为0.
飞机滚转阻尼特性主要由飞机的滚转阻尼力矩导数Clp决定.对于常规布局飞机,全机Clp约90%左右来源于机翼[9].平尾和垂尾对Clp的贡献相对机翼而言较小.对于大展弦比飞翼布局飞机,由于其翼展和翼面积均很大,因此其滚转阻尼通常比常规大展弦比飞机要大一些.
飞机荷兰滚震荡的阻尼主要与偏航阻尼力矩导数Cnr和滚转交感力矩导数Clr有关.对于常规布局飞机,约全机Cnr的80% ~90%来源于垂尾的贡献,而机翼Cnr的贡献可忽略不计[9].因此,飞翼布局飞机的偏航阻尼主要由机身产生,同常规飞机相比,其Cnr非常小,几乎为0.
滚转交感力矩导数Clr对横航向动态响应的影响相对于Cnr要弱很多[9].对于常规布局飞机,全机的Clr主要由机翼和垂尾的贡献叠加而成.其中,机翼产生的Clr随升力系数CL的增大而增大[8].由于采用翼身融合设计,飞翼布局飞机的升力面较大,在相同情况下,其配平升力系数较小,故机翼产生的Clr较小.又由于取消垂尾,飞翼布局飞机的 Clr比常规飞机小很多,可以近似忽略.
1.2 阻力舵的三轴耦合特性
飞翼布局飞机由于取消了尾翼,无法使用常规的升降舵和方向舵,而是采取一系列新型操纵面实现飞机的操纵.大展弦比飞翼布局飞机操纵面配置多采用开裂式方向舵和多组升降副翼组合的方式(如图1所示).
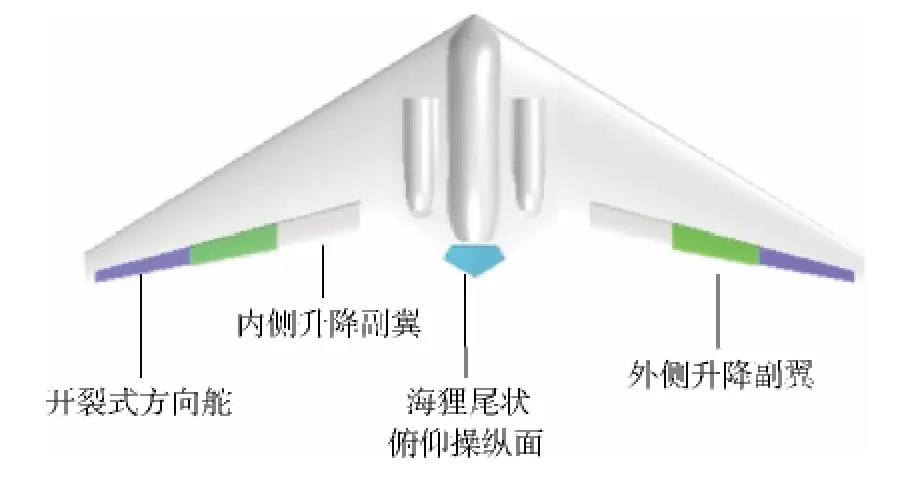
图1 FW-H操纵面配置方案Fig.1 Control surface arrangement scheme of FW-H
开裂式方向舵属于阻力类方向舵,通过一侧偏转产生不对称阻力实现偏航操纵,具有附加力效应显著和三轴操纵耦合的特性[10].随着一侧开裂式方向舵的偏转,飞机重心之后的局部升力减小,飞机具有抬头趋势,同时导致该侧机翼升力部分损失,飞机有向该侧滚转的趋势.当舵偏角增大,飞机的抬头和滚转效应加强,三轴耦合效应增强.
2 舵面偏转速率大小的设计方法
舵面偏转速率的大小会对飞机的动态响应产生影响[6].当舵面偏转速率达到饱和状态时,在驾驶员操纵或受到外界扰动下,飞机将可能进入危险的、很难改出的自激振荡状态,进而影响飞机的飞行品质,甚至危及飞行安全[3].
基于舵面偏转速率大小对飞机飞行品质的影响,在已完成飞机飞行控制系统设计的情形下,本文建立了飞翼布局飞机舵面偏转速率限制值的设计方法和流程:①对操纵面的操纵效能进行人工解耦;②设定各轴操纵面偏转速率限制值的初值;③分别确定飞机在三轴上对舵面偏转速率要求最大的临界飞行状态点;④选取设计舵面;⑤对闭环飞机系统进行飞行品质评定;⑥将非设计舵面偏转速率限制值固定为初值,依据品质评定结果,修改设计舵面偏转速率限制值,直至满足一级飞行品质要求.具体流程如图2所示.
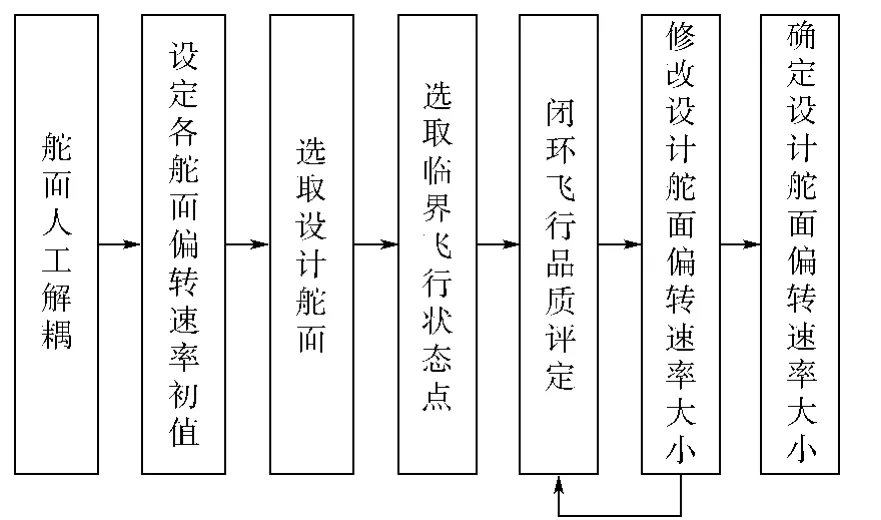
图2 舵面偏转速率设计流程Fig.2 Process for designing actuator rate
2.1 舵面人工解耦
由于采用无尾翼身融合设计,飞翼布局飞机新型舵面在操纵效能上易产生轴间耦合.在飞机初步设计阶段确定各主操纵面偏转速率限制值时,需先对飞翼布局飞机各操纵面的操纵效能进行人工解耦,以简化设计流程,并保证设计具有一定的裕度.
飞机在受到航向扰动后,由于开裂式方向舵偏转会产生附加的俯仰与滚转力矩,为了实现飞机的三轴配平,俯仰和滚转操纵面也要相应地偏转,这些舵面也会产生一些偏航力矩.在设计开裂式方向舵偏转速率限制值时,可先忽略俯仰和滚转舵面产生的偏航力矩,即将两组升降副翼的偏航操纵导数设为0,假定全机偏航操纵力矩仅由开裂式方向舵提供.依此类推,在人工解耦假设下,确定俯仰与滚转操纵面偏转速率大小时,另二个轴向舵面的操纵导数均假设为0.
2.2 临界状态点选取
当飞机飞行状态改变时,不仅飞机的本体特性会发生改变,同一舵面的操纵效能也将随之发生变化,使得舵机回路中速率约束的作用改变.因而,对于不同舵面,对偏转速率最大值要求的状态点是不同的.在设计大展弦比飞翼布局飞机各主操纵面偏转速率限制值时,需分别确定其对应的临界状态点.
在全飞行包线内,起飞状态下飞机的配平迎角最大,且静态气动系数是迎角的非线性函数.飞翼布局飞机的失速迎角较小,受到扰动后易导致其出现失速.在确定纵向主操纵面偏转速率限制值时,宜以起飞状态为飞行品质评定临界状态点.
飞翼布局飞机在着陆状态下,开裂式方向舵两侧逐渐对称打开至最大偏度,起增大阻力的作用.飞机在受到干扰后,横航向控制主要由横向操纵面实现.在确定横向主操纵面偏转速率限制值时,宜以着陆状态为飞行品质评定临界状态点.
由于大展弦比飞翼布局飞机的偏航阻尼导数Cnr约为0,导致荷兰滚阻尼过小,受到干扰后,飞机将产生强烈的左右振荡,飞机的跟踪性将降低.在确定航向主操纵面偏转速率限制值时,宜以A种飞行阶段作为飞行品质评定临界状态点.
2.3 飞行品质评定准则选取
1)纵向:根据MIL-STD-1797A飞行品质规范要求,对于俯仰轴的飞行品质评定,可分为长周期和短周期响应特性.由于采用电传飞行控制系统,飞翼布局飞机闭环响应为飞行控制律的指令响应,不会出现慢运动的长周期响应特性.飞机受到扰动的初期,运动参数变化快,驾驶员往往来不及反应并予以纠正,对飞机飞行的安全、操纵反应等特性影响很大,研究纵向舵偏速率问题时,应重点考虑短周期的模态特性要求.
由于飞翼布局飞机采用电传飞行控制系统,其高增稳的闭环响应特性有异于常规飞机的本体响应特性,因此,宜选用适用于非常规响应的短周期飞行品质评定方法中的Chalk准则[11],从高阶系统时域特性方面来研究确定飞翼布局飞机满足一级飞行品质要求的纵向主操纵面最小偏转速率限制值.
2)横向:飞机横向飞行品质的要求是多方面的,其中滚转操纵时的滚转响应是最主要的动态特性要求[12],由飞机的等效滚转模态时间常数TR反映.滚转模态时间常数描述了飞机的滚转阻尼特性,其大小直接影响驾驶员对飞机进行精确操纵的难易程度.因而,选取等效滚转模态时间常数这一指标来确定飞翼布局飞机满足一级飞行品质要求的横向主操纵面最小偏转速率限制值.
3)航向:飞机对航向输入所产生的航向与滚转振荡响应特性,主要以荷兰滚模态阻尼比ζd、自然频率 ωnd以及二者乘积 ζdωnd来表征[12].因而,选取荷兰滚模态的频率及阻尼比来确定飞翼布局飞机满足一级飞行品质要求的航向主操纵面最小偏转速率限制值.
3 算例与结果分析
3.1 算例对象
选取FW-H[13-14]大展弦比飞翼布局飞机为研究算例.计算所用原始数据均来源于中国空气动力研究与发展中心的风洞试验.FW-H飞翼飞机构型如图1所示,采用小后掠角(30°)大展弦比(9.3)无尾三角翼布局,共设有4组7块操纵面,分别为开裂式方向舵、内侧升降副翼、外侧升降副翼以及海狸尾状俯仰操纵面.其中,海狸尾状俯仰操纵面起俯仰轴修正操纵作用,其与升降副翼共同构成阵风减缓系统(驾驶员通常无权限控制),以使飞机在低空飞行时保持平稳[15].
FW-H飞翼构型飞机采用多操纵面设计,不同舵面的主要操纵功能如表1所示,假设各操纵面偏转速率限制值初值统一取为120(°)/s.

表1 不同舵面的操纵功能Table 1 Control function of different control surfaces
FW-H飞翼布局飞机本体的阻尼特性较差,具有多操纵面冗余配置,飞行动力学特性非线性较强,基于逆动力学结合模型跟踪的非线性自适应方法,完成设计的飞行控制系统如图3所示.
系统的输入为操纵指令yc,根据飞行控制系统的要求,可以为驾驶员杆指令、姿态或轨迹控制指令,给飞机的输入指令为舵面偏角指令u.
整个控制系统可分为指令生成、指令解算和控制分配3个主要模块.其中,指令生成模块将操纵指令通过理想的飞行品质模型生成伪控制输入v;指令解算模块根据输入的伪控制输入v,通过动态逆环节,解算得到完成给定控制指令所需的三轴操纵力矩;控制分配模块通过基底排序最优控制分配方法[16]将期望的三轴力矩分配到各个操纵面上.系统通过模型跟踪、刚体逆动力学解算和多操纵面控制分配来最终实现系统的整体控制.

图3 飞行控制系统结构图Fig.3 Configuration diagram of flight control system
3.2 纵向主操纵面
FW-H构型飞翼飞机纵向运动的主操纵面是内侧升降副翼,其特点是操纵力臂相对较短.在起飞状态下,选取时长3 s,幅值1°的迎角阶跃信号为系统输入指令,固定外侧升降副翼和开裂式方向舵偏转速率限制值均为120(°)/s,依次选取内侧升降副翼偏转速率限制值分别为120、80、79、66和65(°)/s的5种情形进行量化分析.
FW-H飞机在不同速率限制下的迎角时域响应如图4所示.随着偏转速率限制值的降低(情形1→5),迎角响应的峰值增大,迎角变化的平稳性逐渐变差.速率限制值较大时,迎角响应变化比较平缓,系统跟踪特性良好.速率限制值较小时(情形4和情形5),迎角响应振荡,反应比较剧烈,飞机控制困难,跟踪特性较差.

图4 迎角响应特性曲线Fig.4 Response characteristic curve of angle of attack
对于大展弦比飞翼布局飞机,由于取消平尾后机身变短,其纵向阻尼特性显著下降,对操纵面的要求较高.受速率限制约束,舵机回路输出δ与输入 δc的幅值比 δ/δc<1,并且随着舵机速率饱和时间增加,幅值比 δ/δc减小[17].随着舵机回路速率限制值的降低,对同一输入指令,舵机速率处于饱和状态的时间增多,舵机回路的非线性特性加强,输出幅值减小严重,使得舵面操纵效果减弱,飞机振荡加剧,故平稳性下降.
FW-H飞机俯仰角速度响应特性主要依据Chalk准则的瞬态峰值比Δqmin/Δqmax进行短周期时域品质特性评定.短周期俯仰响应的阻尼特性通过瞬态峰值比体现.
由图5得瞬态峰值比结果,如表2所示.从表2可知,随着速率限制值δ·max的减小,基于Chalk准则的飞行品质参数Δqmin/Δqmax逐渐变大,短周期阻尼下降,飞行品质特性有逐渐变差的趋势,对应的Chalk准则的飞行品质等级逐渐降低.
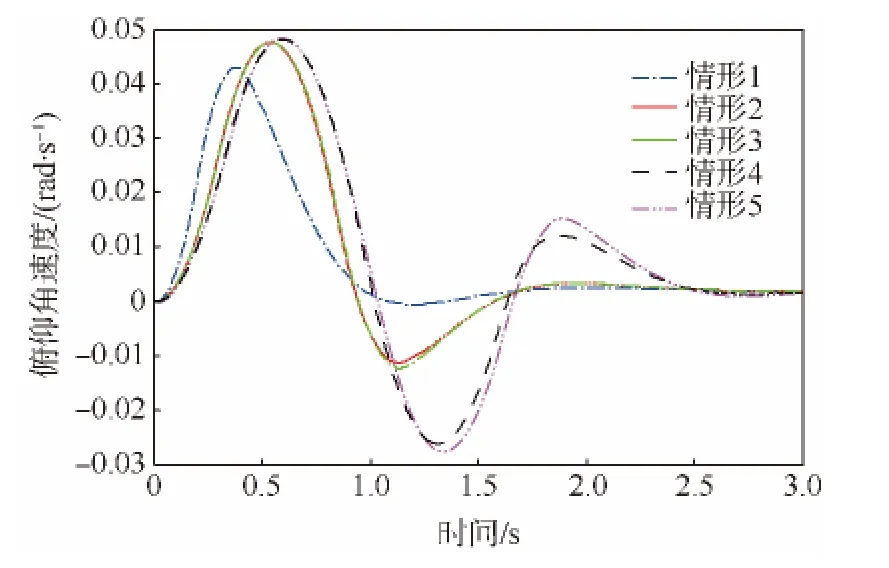
图5 俯仰角速度响应曲线Fig.5 Characteristic curve of pitch angle velocity response

表2 纵向Chalk准则飞行品质评定结果Table 2 Flying qualities assessment results by vertical Chalk criteria
此外,飞机的有效时间延迟t1随着偏转速率限制的降低而增加,飞机的快速性变差,无法及时地跟踪期望的响应特性.在控制系统的舵机回路中,若速率限制值较小,舵机速率易达到饱和状态,舵机回路变成非线性动态环节,致使舵机输出与输入指令间存在较大的相位滞后,故时间延迟增加[17].
对FW-H飞机,当纵向主操纵面内侧升降副翼的偏转速率限制值大于80(°)/s,系统跟踪特性良好,可获得一级飞行品质;当速率限制值小于66(°)/s,状态变量变化幅度较大,飞行品质特性较差,只能达到三级飞行品质,飞机控制困难.因此,为了保证FW-H飞机具有一级飞行品质,其纵向主操纵面偏转速率限制值需大于80(°)/s.
3.3 横向主操纵面
FW-H构型飞翼飞机的横向主操纵面是外侧升降副翼.在着陆状态下,选取单位时长为1 s,幅值为0.1 rad/s的“3211”滚转角速度信号为系统输入指令,固定内侧升降副翼和开裂式方向舵偏转速率限制值均为120(°)/s,依次选取外侧升降副翼偏转速率限制值分别为120、96、95、56和55(°)/s的5种情形进行量化分析.
对于采用复杂飞行控制系统的高阶FW-H飞机,利用低阶等效系统方法拟配得到等效滚转模态时间常数TR,结果如表3所示.
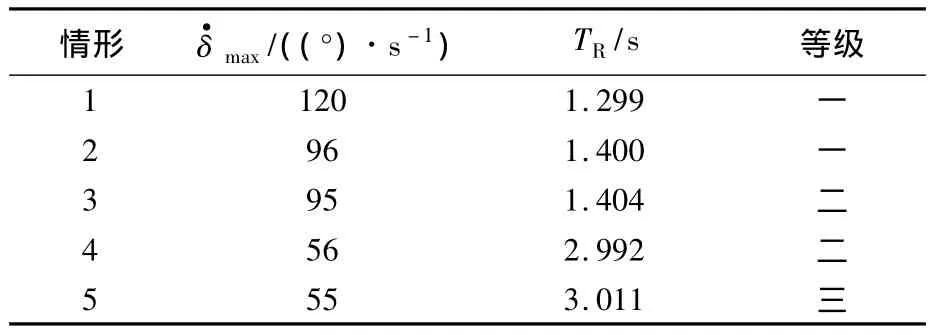
表3 滚动模态的横向飞行品质评定结果Table 3 Lateral flying qualities assessment result of rolling mode
由表3可知,随着偏转速率限制值的减小,FW-H飞机的滚转模态时间常数增大,飞行品质等级逐渐降低.
对于FW-H飞机,当其外侧升降副翼偏转速率限制值大于96(°)/s时,可获得一级飞行品质,飞机具有良好的滚转动态特性.当速率限制值小于56(°)/s时,飞机的横向飞行品质降低至三级,出现扰动时飞机滚转阻尼降低,收敛变慢,控制较难的现象.因此,为保证FW-H飞机获得一级飞行品质,其横向主操纵面偏转速率限制值需大于96(°)/s.
3.4 航向主操纵面
FW-H构型飞翼飞机的航向主操纵面是开裂式方向舵.在A种飞行阶段低空飞行状态下,选取单位时长为1 s,幅值为0.05°的“3211”侧滑角信号作为系统的输入指令,固定内侧升降副翼和外侧升降副翼偏转速率限制值均为120(°)/s,依次选取开裂式方向舵偏转速率限制值分别为120、69、68、16 和 15(°)/s的 5 种情形进行量化分析.
对于采用复杂飞行控制系统的高阶FW-H飞机,利用低阶等效系统方法拟配得到飞机的荷兰滚模态的阻尼比ζd及自然频率ωnd,结果如表4所示.
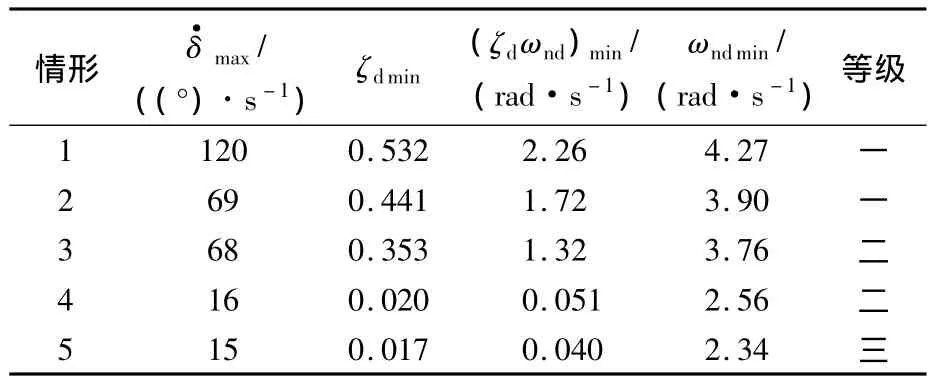
表4 荷兰滚模态的航向飞行品质评定结果Table 4 Directional flying qualities assessment of Dutch rolling mode
由表4可知,随着偏转速率限制值的减小,飞机荷兰滚模态阻尼比和自然频率降低,飞行品质等级逐渐降低.
对于FW-H飞机,当开裂式方向舵偏转速率限制值大于69(°)/s时,飞机闭环系统的荷兰滚模态参数阻尼比与自然频率满足一级飞行品质要求.当偏转速率限制值小于16(°)/s时,其航向飞行品质降低至三级,急剧机动时飞机控制较难.因此,为保证FW-H飞机具有一级飞行品质,其航向主操纵面偏转速率限制值需大于69(°)/s.
3.5 三轴舵面偏转速率大小对比分析
根据上述分析,FW-H飞翼构型飞机纵、横、航向主操纵面偏转速率设计最小值依次为80、96、69(°)/s.
舵机回路的速率限制会引起一定的相位滞后,产生时间延迟.给定输入下速率限制值越小引发的时间延迟越大.具有小的时间延迟是好的飞行品质的关键.由于飞行任务的不同,规范MIL-STD-1797A对飞机纵、横、航向的时间延迟要求不同.纵向Chalk准则有效时间延迟一级要求为t1≤0.12 s.横向滚转控制要求的一级等效时间延迟为τep≤0.1 s.而在规范中对航向时间延迟τeβ没有提出要求.τeβ的大小并不像在俯仰及滚转控制时那么严重地影响飞行品质,因为驾驶员通常不采用航向控制来完成侧滑角的高增益精确跟踪任务.因此,从飞行品质对时间延迟要求出发,大展弦比飞翼布局飞机对横向主操纵面偏转速率限制值要求最高,其次是纵向,最后是航向.
除飞行品质要求外,飞机舵面偏转速率限制值的大小还与飞机本体有量纲的阻尼导数有关.对飞翼飞机,纵向主要体现为,横向为,航向为,具体计算公式为[8]


式中:c为平均弦长;b为展长;Q为动压;S为翼面积;V*为基准运动飞行速度;Ix为绕滚转轴转动惯量;Iy为绕俯仰轴转动惯量;Iz为绕偏航轴转动惯量;Izx为滚转偏航轴的惯性积.
对同一输入指令,若飞机的有量纲阻尼导数越大,动态响应快速性就越好,对指令速率的增加要求就越高.当舵面偏转速率限制值较小,速率处于饱和状态时,指令速率的增加会受到限制.因此,有量纲的阻尼导数越大,相应的舵面偏转速率限制值需越大.
由式(1)~式(3)可见,飞翼布局飞机三轴舵面偏转速率限制值的相对大小不仅与飞机气动导数有关,还与飞机的转动惯量、展弦比等相关.实际工程设计中还与舵面铰链力矩、机体和舵面弹性变形等因素相关.

4 结论
1)舵面偏转速率的大小影响飞机的飞行品质.对于本体稳定特性较差的飞翼布局飞机而言,其舵面偏转速率必须具有足够的大小,以保证获得满意的飞行品质特性.
2)建立了飞翼布局飞机舵面偏转速率设计方法:首先进行舵面人工解耦,确定临界飞行状态点,设定舵面偏转速率设计初值,然后选取飞行品质评定准则,进行闭环系统飞行品质评定,最后依据评定结果,修改速率限制值,直至其满足一级飞行品质要求.
3)基于飞行品质规范要求以及飞机本体阻尼特性,FW-H大展弦比飞翼布局飞机对横向主操纵面偏转速率限制值要求最高,其次是纵向,最后是航向,对应的数值依次为96、80和69(°)/s.
References)
[1]王广雄,何朕.控制系统设计[M].北京:清华大学出版社,2008:176-194.Wang G X,He Z.Control system design[M].Beijing:Tsinghua University Press,2008:176-194(in Chinese).
[2] Klyde D H,Mitchell D G.Investigating the role of rate limiting in pilot-induced oscillations[J].Journal of Guidance,Control and Dynamics,2004,27(5):804-813.
[3] Klyde D H,McRuer D T,Myers T T.PIO analysis with actuator rate limiting[C]∥21st Atmospheric Flight Mechanics Conference.Reston:AIAA,1996:29-31.
[4] Hanke D.Flight test evaluation and data analysis of rate limiting induced PIO’s[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit.Reston:AIAA,2003:194-214.
[5]张跃,段镇.轴对称飞行器滚转稳定控制与舵机技术指标[J].光学精密工程,2010,18(1):100-107.Zhang Y,Duan Z.Roll stable control and rudder’s technologic parameters of axisymmetric aircrafts[J].Optics and Precision Engineering,2010,18(1):100-107(in Chinese).
[6]李淼,王立新,黄成涛.舵面特性对飞翼构型作战飞机短周期品质的影响[J].航空学报,2009,30(11):2059-2065.Li M,Wang L X,Huang C T.Influence of control surface characteristics on short period mode flying qualities for flying wing aircraft[J].Acta Aeronautica et Astronautica Sinica,2009,30(11):2059-2065(in Chinese).
[7]张明廉.飞行控制系统[M].北京:航空工业出版社,1994:26-28.Zhang M L.Flight control system[M].Beijing:Aviation Industry Press,1994:26-28(in Chinese).
[8]方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005:222-223.Fang Z P,Chen W C,Zhang S G.Aircraft flight dynamics[M].Beijing:Beihang University Press,2005:222-223(in Chinese).
[9]飞机设计手册总编委会.飞机设计手册6(气动设计)[M].北京:航空工业出版社,2002:413-414.Aircraft Design Manual General Editor Committee.Aircraft design manual 6(aerodynamic design)[M].Beijing:Aviation Industry Press,2002:413-414(in Chinese).
[10]王磊,王立新,贾重任.飞翼布局飞机开裂式方向舵的作用特性和使用特点[J].航空学报,2011,32(8):1392-1399.Wang L,Wang L X,Jia Z R.Control features and application characteristics of split drag rudder utilized by flying wing[J].Acta Aeronautica et Astronautica Sinica,2011,32(8):1392-1399(in Chinese).
[11] MIL-STD-1797A Military Standard:Flying qualityes of piloted air planes[S].Washington D.C.:Department of Defense,1990:226-229.
[12]高金源,李陆豫,冯亚昌.飞机飞行品质[M].北京:国防工业出版社,2003:107-109.Gao J Y,Li L Y,Feng Y C.Aircraft handling qualities[M].Beijing:National Defense Industry Press,2003:107-109(in Chinese).
[13]李林,王立新.大展弦比飞翼构型作战飞机横航向飞行品质特性[J].北京航空航天大学学报,2009,35(6):661-664.Li L,Wang L X.Lateral-directional flying quality characteristics of high aspect-ratio combat flying wings[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(6):661-664(in Chinese).
[14]马超,李林,王立新.大展弦比飞翼布局飞机新型操纵面设计[J].北京航空航天大学学报,2007,33(2):149-153.Ma C,Li L,Wang L X.Design of innovative control surfaces of flying wing aircrafts with large ratio aspect[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(2):149-153(in Chinese).
[15]高洁,王立新,周堃.大展弦比飞翼构型飞机阵风载荷减缓控制[J].北京航空航天大学学报,2008,34(9):1076-1079.Gao J,Wang L X,Zhou K.Gust load alleviation control of aircraft with large ratio flying wing configuration[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(9):1076-1079(in Chinese).
[16]杨凌宇,高金源,申功璋.飞行控制中的一种新型最优控制分配方法[J].北京航空航天大学学报,2007,33(5):572-576.Yang L Y,Gao J Y,Shen G Z.New optimal control allocation method for flight control system[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(5):572-576(in Chinese).
[17] Klyde D H,McRuer D T,Myers T T.Pilot-induced oscillation analysis and prediction with actuator rate limiting[J].Journal of Guidance Control and Dynamics,1997,20(1):81-89.
猜你喜欢
装备环境工程(2022年9期)2022-10-13
商品与质量(2021年43期)2022-01-18
兵器装备工程学报(2021年12期)2022-01-11
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
北京航空航天大学学报(2018年1期)2018-04-20
电子制作(2018年1期)2018-04-04
科学与财富(2018年1期)2018-03-03
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2017年5期)2017-11-23
