
Telematics车载终端CAN通讯收发电路的电磁兼容性设计
2015-10-15 05:46周立夫金晓华刘晨曦倪如金刘祎
汽车实用技术 2015年9期
周立夫,金晓华,刘晨曦,倪如金,刘祎
(1.德赛西威汽车电子公司前期研发部南京分部,江苏 南京 211100;
2.南京工程学院电力工程学院,江苏 南京 211100)
Telematics车载终端CAN通讯收发电路的电磁兼容性设计
周立夫1,金晓华2,刘晨曦1,倪如金1,刘祎1
(1.德赛西威汽车电子公司前期研发部南京分部,江苏 南京 211100;
2.南京工程学院电力工程学院,江苏 南京 211100)
CAN总线是国际上应用最广泛的现场总线之一。如今,在汽车电子领域,CAN总线的应用越来越普及。文章主要以恩智浦公司高速CAN收发器TJA1043系列为对象,在介绍其基本结构和特点的基础上,应用TJA1043作为CAN收发器设计了一款车载Telematics终端盒CAN通讯模块,并重点介绍CAN收发电路在硬件和PCB方面的电磁兼容性设计。
TJA1043;TBOX;CAN总线;收发器;电磁兼容性
10.16638/j.cnki.1671-7988.2015.09.028
CLC NO.: U467.4 Document Code: A Article ID: 1671-7988(2015)09-80-04
引言
CAN-bus(Controller Area Network)即控制器局域网,最初出现在80年代末的汽车工业中,是国际上应用最广泛的现场总线之一。它是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出通讯过程中产生的错误。在信号传输距离达到10km时,CAN-bus仍可提供高达50kbps的数据传输速率。由于CAN通讯总线具有这些特性,它被广泛应用在交通、国防、工程、机械、纺织、数控、医疗,机器人等领域。
近年来,Telematics(即车联网)在车身上的应用越来越普遍,在Telematics终端盒(Telematics BOX,下文缩写为TBOX)项目应用中,TBOX通过CAN总线通讯,获得车身内数据(比如油量、速度、方向盘转角等),再通过移动通信网络,将这些数据发送到后台服务器,以便进一步加工处理,如远程诊断、监控等功能。同时TBOX也可以通过CAN总线,按照预定协议,执行控制动作,如开/关车窗和空调、远程升级车身上一些ECU(Electrical Control Unit)的固件等。由此可见,在TBOX项目中,CAN总线成为了TBOX和车身内各控制单元之间沟通的重要桥梁。
CAN收发器是控制器局域网中协议控制器和CAN物理总线之间的接口,恩智浦(NXP)公司早期的高速CAN收发器主要是TJA1040和TJA1041,相比TJA1040,TJA1041增加了一种工作模式,即睡眠(Sleep)模式,能满足更苛刻的静态电流设计要求。后来,在 TJA1041的基础上,NXP又推出一款升级的芯片,即TJA1043,该芯片在TJA1041基础上优化了EMC(ElectroMagnetic Compatibility)以及ESD(ElectroMagnetic Discharge)性能,具有更低的功率损耗,允许当车身点火信号关闭时,使CAN总线仍然能被唤醒的能力。在睡眠状态时TJA1043的待机电流可低至20uA左右。能较好的应用在对静态电流要求较苛刻的产品设计中。TJA1043系列收发器主要用于车身内部网络最高达1Mbps的CAN通讯模块中,最多支持连接32个节点。其内部结构如下图1所示[1]。
TJA1043芯片为SO14脚封装,其管脚定义如下表1所示。
在正常操作模式下(没有线路故障),TBOX通过CANH和CANL与车身总线相连,经过TJA1043之后,再转换成RXD/TXD信号,与TBOX内的微处理器进行通讯。
TJA1043带自诊断和自保护功能。如:
(1)具有诊断功能的发送数据(TXD)显性超时;
(2)具有诊断功能的TXD对RXD短路处理;
(3)热保护;
(4)VCC、VIO和VBAT 的欠压检测和恢复;
(5)总线线路短路诊断;
(6)总线箝位诊断;
(7)冷启动(首次连接电池)。
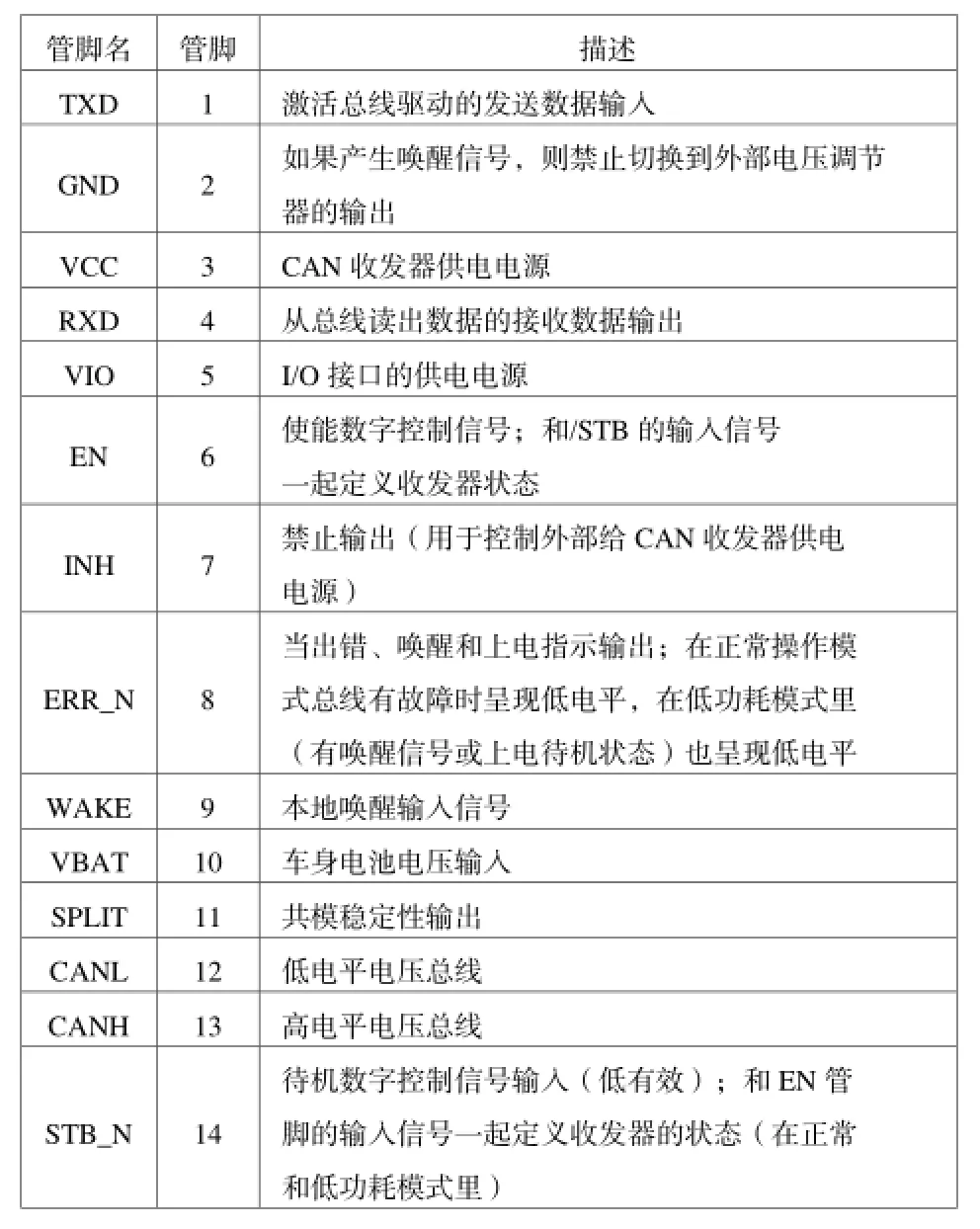
表1 TJA1043管脚定义
1、硬件设计应用
在应用TJA1043系列收发器设计CAN通讯收发模块时,为了得到较好的效果,在硬件设计方面,建议遵循一些基本原则,如下图2所示。
这是采用TJA1043设计的TBOX的CAN收发器的模块电路。在该模块电路中,包含三路电源:KL30A(在汽车电子应用中,即蓄电池电压,在经过保护处理之后的电压)和VCC(5V供电电源)电压和VIO(3.3V供电电源)、CANH/ CANL终端匹配电阻、EMC辅助元器件等。因篇幅所限,电路设计图中VIO和VCC的产生以及两路LDO的控制未完全体现该部分电路设计中,图中仅以方框表示,以下将介绍各电路元器件参数选择及应用考虑事项等。
1.1终端匹配电阻阻值计算
实际应用时,需在CANH和CANL上加终端电阻,如图2TJA1043应用于TBOX终端中的模块电路所示的R106、R107、R106+R107电阻的配置值须符合SAE J2284-3[2]的规定,即两电阻的名义值须在60Ω~62Ω之间。同时,当CANH或CANL一旦与车身电池电压之间发生短路连接时,大电流瞬时经过这两个电阻,所以一般电阻封装选用 1206封装的电阻。
为了保证同一节点的CANH和CANL上差分信号的完整对称性,需考虑匹配在同一节点上CANH和CANL的终端电阻的完全一致性,一般选取1%误差的相同的电阻。
考虑总线上有多个子节点,如下图 3[3]所示为一假设 8子节点和两个终端节点时,CAN总线网络的终端匹配电阻,这时,每个子节点的终端匹配电阻典型值一般取 1.3kΩ。在图2所设计的TBOX终端CAN通讯模块电路中,R106,R107选取1%误差的60.4 Ω的电阻。
1.2RBAT的选择
在汽车TBOX的应用中,通常将BAT管脚(芯片第14脚)直接连接到蓄电池电压输出端,TBOX终端中定义的电池电压为12V(或24V),如设计产品需要依照汽车电源暂态传导干扰试验标准ISO7637-2做脉冲干扰试验中的脉冲5a实验项目时(图4 脉冲5a波形所示为脉冲5a实验的波形[4],表2脉冲5a波形参数定义为5a波形对应的参数信息),由于高达68V的电池电压将加在该管脚,持续时间长达几百毫秒,而该芯片RBAT管脚能持续忍受的最大电压仅为40V,因此,需串联一个电阻RBAT(即图2所示的R108)。否则,在EMC试验的脉冲实验中,CAN收发器芯片的BAT管脚将直接承受68V的电压冲击,瞬间产生闩锁效应(latch up),进而烧毁芯片,一般推荐串联一个1k~5k的电阻。同时,在靠近VBAT脚接一个10NF左右的对地的电容,见图2所示电路中C104,C104和C108构成一路低通滤波器,能有效改善该管脚的抗电磁干扰能力。
1.3CAN总线串联共模电感
在EMC要求比较高场合中,为提高抗干扰能力,需在CANH和CANL上串联一个共模电感,一般为10~100微亨[3,5]。共模电感是一个以铁氧体为磁芯的共模干扰抑制器件,它由两个尺寸相同,匝数相同的线圈对称地绕制在同一个铁氧体环形磁芯上,形成一个四端器件,原理是流过共模电流时,磁环中的磁通相互叠加,从而具有相当大的电感量,对共模电流起到抑制作用,而当两线圈中流过差模电流时,磁环中的磁通相互抵消,几乎没有电感量,差模电流可以无衰减地通过。因此共模电感在平衡线路中 能有效地抑制共模干扰信号,而对线路正常传输的差模信号无影响。实际设计时,基于成本考虑,可用两个零欧姆电阻替代共模电感;EMC实验过程中,如果发现 CAN受到干扰,测试项不通过时,再将零欧姆电阻改用共模电感替代做测试,以改善该模块的EMC效果。
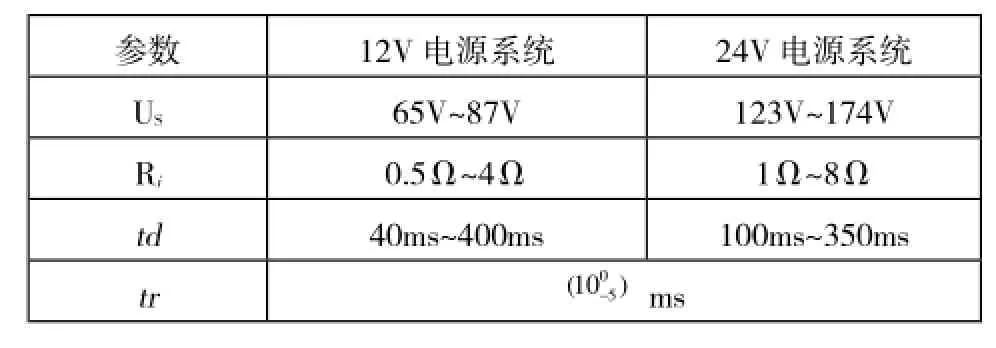
表2 脉冲5a波形参数定义
1.4基于ESD考虑的一些辅助器件
TJA1043内部集成了ESD (Electrostatic Discharge)保护电路,该芯片具有2KV的ESD保护能力。将该芯片应用于电路板上,由于额外的因走线及连接器产生的等效容性负载,ESD效果相对较好;但是在 ESD要求更高的场合,如汽车电子中应用中,按照 ISO10605标准要求,当接触放电要求4KV或以上时,需额外增加一些辅助 ESD元器件,如图 2所示电路中的C101、C102以及D101和D102等。
一般考虑C101=C102,取100pF~330pF;D101和D102为齐纳二极管,考虑选取其饱和压降需大于最大总线直流电压,通常取小于(或等于)27V的齐纳二极管或压敏电阻。
1.5本地唤醒脚电路设计

所以,算出R109.min阻值约为2.67KΩ,图2中设计取值为3.3KΩ。
图2中R110目的是为了保证在没有本地激活信号(即图2所示电路中Q102不导通)时,WAKE脚信号必须保证是高电平,即满足:
算出:
在图2TJA1043应用于TBOX终端中的模块电路设计中,R110取值为47KΩ。
1.6PCB设计考虑
在进行 PCB布线时,考虑到电磁抗干扰性要求,对于CAN通讯模块要注意以下几点:
(1)将收发器模块靠近CAN控制器放置,使RXD/TXD走线尽可能短;
(2)CANH和CANL走线长度保持一致,布线时,设置成差分线模式,两根线之间间距保持一致,且线间不能插入地线;
(3)如电路中添加了共模电感,则电路中电压尖峰抑制模块(如图2 TJA1043应用于TBOX终端中的模块电路所示Z1、Z2和Z3)放置在收发器和共模电感之间,确保能抑制当总线故障时,由于共模电感的电感效应所产生的尖峰暂态脉冲[5];
(4)ESD保护器件(如图2TJA1043应用于TBOX终端中的模块电路所示C3和C4)尽量放在靠近CANH/CANL差分信号输入/输出位置,确保外部感应的的 ESD能量在第一时间被过滤掉;
(5)去耦电容(如图2TJA1043应用于TBOX终端中的模块电路所示C1和C2)靠近收发器电源管脚;
(6)PCB走线设计时,确保地回路尽可能粗且短。
2、软件操作模式
TJA1043 CAN收发器具备五种工作模式,分别是监听模式、正常工作模式、低功耗模式、进入休眠状态以及休眠模式。通过设置芯片管脚/STB和EN管脚的不同状态组合进入或退出各工作模式[1],下图5为各模式切换的状态图。
相比常规CAN收发器,TJA1043多了休眠模式,在此工作模式下,芯片管脚INH切换到高阻抗状态,释放外部电压调节器,关断VIO和VCC。此时芯片消耗的电流低至几微安,且带远程CAN消息唤醒功能。
3、结论
具备自诊断功能的高速CAN收发器TJA1043,因其较好的电磁抗干扰能力,极低的静态待机功耗,使其在汽车电子领域的高速CAN总线设计中得到广泛应用。本文总结了使用该芯片设计车载Telematic终端盒的CAN通讯收发模块过程中,关于电磁抗干扰方面一些心得体会及注意事项,在使用该芯片设计CAN通讯模块时,遵循上述设计原则,将有助于获得较好的CAN通讯和EMC效果。
[1] TJA1043 High-speed CAN transceiver,Rev.00.06-29 June 2009.
[2] SAE J2284-3 2002 High Speed CAN(HSC) for Vehicle Applications at 500kbps.
[3] TR1014 Application Hints-Standalone high speed CAN transceiver TJA1042/TJA1043/TJA1048/TJA1051.
[4] International standard, 7637-2:2004[E].
[5] "Common Mode Chokes in CAN Networks", Source of Unexpected Transients. Texax Instruments. Application Report, SLLA271-Janu -ary 2008.
[6] International standard, 11898-3:2003[E].
[7] ISO10605 Road Vehicle-Test methods for electrical disturbances from electrostatic discharge.
The EMC Design of Transceiver Module for CAN Communication in an Automotive Telematics BOX
Zhou Lifu1, Jin Xiaohua2, Liu Chenxi1, Ni Rujin1, Liu Yi1
(1.Nanjing Center, Advanced Development Central Technology, Desay SV Automotive Co., Ltd., Jiangsu Nanjing 211100; 2.School of Electric Power Engineering, Nanjing Institute of Technology, Jiangsu Nanjing 211100)
CAN bus (Controller Area Network) is one of the most popular application field buses in the world, and today it is widely used in automotive engineering field. The structure and its metrits for fault-tolerant transceiver series named TJA1043 which is developed by NXP Corporation is introduced in this paper, and some application notes especially from hardware aspect and EMC consideration are also referred, furthermore, a CAN transceiver module which developed using TJA1043 has been implemented in an automotive Telematics control unit.
TJA1043; TBOX; CAN bus; Transceiver; EMC
U467.4
A
1671-7988(2015)09-80-04
周立夫,就职于德赛西威汽车电子公司前期研发部南京分部。
猜你喜欢
汽车电器(2022年3期)2022-03-24
电源学报(2022年1期)2022-02-25
电子制作(2021年21期)2021-11-10
地震研究(2021年1期)2021-04-13
安徽科技(2021年3期)2021-04-06
日用电器(2020年9期)2020-10-15
计算机与数字工程(2019年4期)2019-05-07
现代职业教育·中职中专(2017年2期)2017-08-13
现代电子技术(2017年14期)2017-07-25
网络与信息(2009年9期)2009-10-30
